一种汽车智能电控悬架减振系统的制作方法
1.本发明涉及一种汽车减振领域,特别涉及一种汽车智能电控悬架减振系统 。
背景技术:
2.汽车减振系统主要用来解决路面不平而给车身带来的冲击, 加速车架与车身振动的衰减,以改善汽车的行驶平稳性。如果把发动机比喻为汽车的“心脏
”ꢀ
,变速器为汽车的“中枢神经”,那么底盘及悬挂减振系统就是汽车的“骨骼骨架”。减振系统不仅决定了一辆汽车的舒适性与操控性同时对车辆的安全性起到很大的决定作用, 随着人们对舒适度要求的不断提高, 减振系统的性能已经成为衡量汽车质量及档次的重要指标之一。
3.现有的汽车减振系统通过悬架与减振器配合对车辆进行减振控制,即在汽车行驶过程中,为抵消减弱路面不平带来的生硬冲击,又能确保车身的横向和纵向稳定性使车辆在悬架设计的自由行程内时刻都可以保持一个较大范围的动态可控姿态。其中悬架可分为被动悬架和主动悬架两大类,其中被动悬架是在出厂前就已经固定好了减振器的阻尼和高度,且减振器的阻尼和高度不可调节;主动悬架则可以根据道路状况实时调节悬架的阻尼和高度,当汽车经过坑洼不平的道路时降低阻尼,调整高度,使汽车平顺,其中的悬架是由弹簧、减振器、导向机构等组成,弹簧主要起减缓冲击力的作用,减振器的主要作用是衰减振动,但是这类采用主动悬架进行减振控制的系统在实际使用过程中还有如下缺陷:1、现在有减振系统主要采用cdc减振器作为核心控制悬架的软硬,但是由于与减振器搭配弹簧的刚度是固定的,就使得现有的减振系统只能通过控制减振器的软硬进行减振,这无疑使的现在的减振系统无法多元化、高效的对整个车身进行智能减振。
4.2、现有的减振控制系统都是在汽车已经行驶到了坑洼处才能检测到路面状况并开始调整阻尼和高度,因此现有减振控制系统存在一定的滞后性,所以车内的驾乘人员不可避免地仍要受到颠簸。
技术实现要素:
5.本发明所要解决的技术问题在于针对上述现有技术的不足,提供一种汽车智能电控悬架减振系统,采用该系统的车辆由于装配了多个传感器、电子控制单元和执行单元,能够根据不同的车速、行驶状态、装载质量以及乘客人数的变化,对空气悬架的刚度、cdc减振器的阻尼力以及车身的高度等项目自动地进行无级调节,无需驾驶人员调节,大大提高了乘坐的舒适性和操纵的稳定性。
6.为实现上述目的,本发明提供了如下技术方案:一种汽车智能电控悬架减振系统,包括信息采集单元、数据分析控制单元以及执行单元,其特征在于:所述数据分析控制单元包括ecu与pwm模块,所述执行单元包括空气悬架,所述空气悬架包括空气弹簧、空气压缩机、空气分配阀与cdc减振器,所述信息采集单元包括用于接收车身垂直振动加速度的车身垂直加速度传感器、用于接收车轮垂直振动加速度的车轮垂直加速度传感器、设置在空气分配阀内的空气弹簧压力传感器以及设置在空气悬架上的空气弹簧高度传感器,所述空气
压缩机通过空气分配阀给空气弹簧充放气,所述pwm模块与ecu及cdc减振器通讯连接,所述ecu、车身垂直加速度传感器以及车轮垂直加速度传感器通讯连接,所述空气弹簧高度传感器与空气弹簧压力传感器与ecu通讯连接;所述空气弹簧高度传感器与空气弹簧压力传感器通过将反馈的数值输送至ecu进行刚度运算后计算出当前空气弹簧的刚度k,并通过对空气分配阀调节空气弹簧内的压力实时控制空气弹簧的刚度k,所述车身垂直加速度传感器以及车轮垂直加速度传感器通过将反馈的数值输送至ecu进行阻尼运算后计算出当前cdc减振器等效阻尼系数c,并结合空气弹簧的承载载荷m通过ecu阻尼比运算后计算出悬架系统阻尼比ξ,所述悬架系统阻尼比ξ为0.2
‑
0.45,所述悬架系统阻尼比运算公式为ξ=c/所述悬架系统阻尼比运算公式为ξ=c/(2√km);所述ecu根据需要获得的空气弹簧的刚度k,通过控制电流运算公式,调整出与空气弹簧刚度k相匹配的阻尼控制电流i ,通过pwm模块将控制电流i发送给cdc减振器电控阀调节cdc减振器的阻尼力,通过刚度运算公式,控制空气分配阀对空气弹簧进行充放气,调节空气弹簧刚度。
7.采用上述技术方案,通过信息采集单元实时检测车辆行驶状态,通过数据分析控制单元对信息采集单元收集到的信号进行判定后再输送给执行单元进行减振调节,具体是指在ecu、车身前方、车身后方均放置车身垂直加速度传感器用以检测车身上方的垂直振动速度,在前后车轮处设置车轮垂直加速度传感器用以检测车轮的垂直振动速度,空气分配阀内的空气弹簧压力传感器用于检测空气弹簧内的压力值,空气悬架上的空气弹簧高度传感器用于检测空气弹簧的形变高度,并结合加速度信号、压力信号与高度信号送至ecu进行判定,ecu判定需要获得的空气悬架刚度k后,再通过pwm(脉宽调制)模块输出控制电流i对cdc减振器的进行适时调整,进而通过cdc减振器的电磁阀控制cdc减振器的阻尼力达到最佳匹配效果,其中承载载荷m指的是空气悬架承载车体重量的承载量,其中车轮、车身加速度传感器,把车辆行驶中采集的加速度a信号,连续适时的传输给ecu。ecu通过得到的信号,判断车辆行驶的状态。采用pi、和模糊算法,通过pwm 模块对cdc减振器的控制电流进行适时调整,达到调整阻尼的效果,把车身的振动控制在预设的范围内。车轮加速度信号用于路面识别,实现对车辆在不同路况,不同行驶状态下空气悬架能自动减振调控,最大限度提升车辆舒适感,车身信号用于垂直振动控制, 空气分配阀内设的空气弹簧压力传感器,把设定高度状态下的载荷变化通过压强信号,适时的传输给ecu,依据压强的变化ecu采用pd算法,调整出与弹簧刚度相匹配的阻尼控制电流i,达到预设的阻尼匹配效果, 同时整个减振系统通过悬架系统阻尼比运算公式、控制电流运算公式与刚度运算公式得出悬架阻尼比ξ,ξ值较大时,能迅速减振,但不适当地增大ξ值会传递较大的路面冲击,甚至使车轮不能迅速向地面回弹而失去附着力和对激励的缓冲能力;ξ值较小时,振动持续时间变长,又不利于改善舒适性为保证舒适性和操控性,因此阻尼比设置在0.2
‑
0.45范围中悬架减振系统减振效果最佳。
8.上述的一种汽车智能电控悬架减振系统,可进一步设置为:所述刚度运算公式为: k=dp/dh;其中p为空气弹簧压力传感器反馈得到空气弹簧压力值;h为空气弹簧高度传感器反馈得到空气弹簧的垂直位移值h;刚度k为空气弹簧内的压力值p对垂直位移值h通过公式微分求导得到。
9.采用上述技术方案,空气弹簧压力传感器反馈得到空气弹簧压力值p,在空气弹簧高度传感器反馈得到空气弹簧的垂直位移值h,通过运算就能便捷知晓当前的悬架刚度k,
通过空气压缩机控制进出气量,通过空气分配阀精准将空气送入或排出各个空气弹簧,就能精准控制悬架刚度k。
10.上述的一种汽车智能电控悬架减振系统,可进一步设置为:通过下述公式计算所述cdc减振器等效阻尼系数c;c = f1/v;其中f1为cdc减振器当前阻尼力; v为车身垂直加速度传感器反馈得到的车身振动速度,当车身垂直速度v一定时,只需控制cdc减振器阻尼力f1就可以控制cdc减振器等效阻尼系数c。
11.采用上述技术方案, v为车身垂直加速度传感器反馈得到的车身振动速度,f1为控制电流i控制下的cdc减振器阻尼力,通过控制ecu输送的控制电流i的值,就能控制cdc减振器等效阻尼系数c,例如当车辆行驶在平缓路段时,即车身垂直加速度v一定时,只需要控制输出的控制电流i,就能获得需要的cdc减振器等效阻尼系数c,进而将ξ控制在0.2
‑
0.45范围中。
12.上述的一种汽车智能电控悬架减振系统,可进一步设置为:所述控制电流运算公式为; i = k1x1/ n;其中k1为电磁阀弹簧刚度,x1为cdc减振器电控阀弹簧调整后需要得到的变形量,n为电控阀的线圈圈数。
13.采用上述技术方案,电控阀的线圈圈数n,k1为电磁阀弹簧刚度为减振系统安装后的恒定值,x1通过空气弹簧高度传感器检测到的cdc减振器电控阀弹簧变形后的变形量,即x0为cdc减振器电控阀弹簧调整前的变形量,通过控制电流i控制cdc减振器改变阻尼力后其改变后的cdc减振器电控阀的弹簧的变形量即为x1,而cdc减振器电控阀的弹簧的变形量的不同数值对应这cdc减振器在当前状态下的流量即其阻尼力,故当需要获得对应cdc减振器的阻尼力时,只需对应其cdc电控阀弹簧调整后的变形量x1,就能计算出需要输送的控制电流i。
14.上述的一种汽车智能电控悬架减振系统,可进一步设置为:所述cdc减振器串接有空气弹簧开卷活塞,所述空气弹簧开卷活塞与空气弹簧的皮囊下端装配连接,所述皮囊的上端与空气弹簧的气室装配连接,所述cdc减振器的活塞杆上端装配在气室内,所述活塞杆的上端设有缓冲块,所述cdc减振器的外缸体与活塞杆的封口部装配有油封,所述cdc减振器通过接收pwm模块发出控制电流i,控制cdc减振器电磁阀流量变化,调整cdc减振器的阻尼力。
15.采用上述技术方案,车身上下振动时将带动cdc减振器内活塞杆运动,当cdc减振器接收pwm模块发出控制电流i信号后,带动cdc减振器电控阀上的弹簧压缩或释放,进而控制cdc减振器内的阻尼力。
16.上述的一种汽车智能电控悬架减振系统,可进一步设置为:通过下述公式计算所述空气弹簧的承载载荷m; m=p/a;其中,p为空气弹簧压力传感器反馈得到空气弹簧压力值,a为空气弹簧的有效面积。
17.采用上述技术方案,m为空气弹簧的承载载荷,通过将空气弹簧压力传感器检测到的空气弹簧压力值与空气弹簧高度传感器反馈得到的空气弹簧形变有效面积计算得到。
18.上述的一种汽车智能电控悬架减振系统,可进一步设置为:通过下述公式计算所述cdc减振器阻尼力f1;f1= x1f0 /x0;其中x1为cdc减振器电控阀弹簧调整后的变形量,x0为cdc减振器电控阀弹簧调整前的变形量,f0为cdc减振器调整前的阻尼力;x0与x1通过在cdc减振器当前阻尼力下的空气弹簧压力传感器反馈获得。
19.采用上述技术方案,x0为cdc减振器电控阀弹簧在减振系统安装后的初始的变形量,x1通过空气弹簧高度传感器检测到的cdc减振器电控阀弹簧变形后的变形量,f0为cdc减振器在减振系统安装后的初始阻尼力,通过cdc减振器阻尼力计算公式,故当需要获得对应cdc减振器的阻尼力f1时,只需对应调整出其cdc电控阀弹簧调整后的变形量x1就能控制需要输出的cdc减振器阻尼力。
20.上述的一种汽车智能电控悬架减振系统,可进一步设置为:所述信息采集单元还包括预检测模块,所述数据分析控制单元还包括can模块,所述can模块与预检测模块及ecu通讯连接。
21.采用上述技术方案,通过预检测模块并接收前方路面的信息,将接收的信息为对应的回波信号,将信号通过can模块(控制器局域网总线)输出至ecu,通过ecu实时地判断前方路面状况, 可以对前方路况进行充分的预判处理,实现对cdc减振器进行自动控制,使得汽车通过前方不平路段时降低车内的震感,提高驾乘舒适性和平稳性。
22.上述的一种汽车智能电控悬架减振系统,可进一步设置为:所述预检测模块包括超声波信号传感器,所述超声波信号传感器设置在车轮前方的车头上,用于按照设定角度激励超声波,并将接收的回波信号通过can模块输送至ecu。
23.采用上述技术方案,将超声波信号传感器安装在汽车车体内前轮前方,并激励超声波在前方发出扇形超声波信号,再反馈给can模块,计算汽车行驶方向上车轮前方凹陷的深度或者坡地的高度,再根据前方凹陷的深度或者坡地的高度以及车轮到达前方洼地或者坡地所需的时间,生成回波信号送至ecu,ecu对前方路况进行判定响,通过放大响应时刻反求当量阻尼,然后发出数字化的阻尼调节指令,通过pwm模块导出电子脉冲信号,当量阻尼进一步计算cdc减振器的具体调节量,最后,将cdc减振器的具体调节量传输给cdc电磁阀,通过调节cdc电磁阀的流量调节液压减振器的阻尼,从而起到减振、缓冲的作用。
24.上述的一种汽车智能电控悬架减振系统,可进一步设置为:所述预检测模块包括光学照相机,所述光学照相机设置在车轮前方的车头上,用于对车头前方拍摄的图像识别,并将接收的图像识别通过can模块建立预检测信号模型再输送至ecu。
25.采用上述技术方案,将光学照相机安装在汽车车体内前轮前方,采集汽车前方信息,通过can模块进行图像识别建立输入信号模型,采用ecu算法对前方路况进行判定响,通过放大响应时刻反求当量阻尼,然后发出数字化的阻尼调节指令,通过pwm模块导出电子脉冲信号,当量阻尼进一步计算cdc减振器的具体调节量,最后,将cdc减振器的具体调节量传输给cdc电磁阀,通过调节cdc电磁阀的流量调节液压减振器的阻尼,从而起到减振、缓冲的作用。
26.下面结合附图对本发明作进一步描述。
附图说明
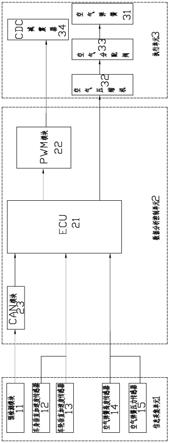
27.图1为本发明实施例的原理框图。
28.图2为本发明实施例空气悬架的结构示意图。
具体实施方式
29.如图1、图2所示一种汽车智能电控悬架减振系统,包括信息采集单元1、数据分析
控制单元2以及执行单元3,所述数据分析控制单元2包括ecu21与pwm模块22,所述执行单元3包括空气悬架,所述空气悬架包括空气弹簧31、空气压缩机32、空气分配阀33与cdc减振器34,所述信息采集单元1包括用于接收车身垂直振动加速度的车身垂直加速度传感器12、用于接收车轮垂直振动加速度的车轮垂直加速度传感器13、设置在空气分配阀33内的空气弹簧压力传感器15以及设置在空气悬架上的空气弹簧高度传感器14,所述空气压缩机32通过空气分配阀33给空气弹簧31充放气,所述pwm模块22与ecu21及cdc减振器34通讯连接,所述ecu21、车身垂直加速度传感器12以及车轮垂直加速度传感器13 通讯连接,所述空气弹簧高度传感器14与空气弹簧压力传感器15与ecu21通讯连接;所述空气弹簧高度传感器14与空气弹簧压力传感器15通过将反馈的数值输送至ecu21进行刚度运算后计算出当前空气弹簧的刚度k,并通过对空气分配阀33调节空气弹簧31内的压力实时控制空气弹簧的刚度k,所述车身垂直加速度传感器12和车轮垂直加速度传感器13通过将反馈的数值输送至ecu21进行阻尼运算后计算出当前cdc减振器34等效阻尼系数c,并结合空气弹簧31的承载载荷m通过ecu阻尼比运算后计算出悬架系统阻尼比ξ,所述悬架系统阻尼比ξ为0.2
‑
0.45,所述悬架系统阻尼比运算公式为ξ=c/架系统阻尼比运算公式为ξ=c/(2√km);所述ecu根据需要获得的空气弹簧的刚度k,通过控制电流运算公式,调整出与空气弹簧刚度k相匹配的阻尼控制电流i ,通过pwm模块22将控制电流i发送给cdc减振器34电控阀调节cdc减振器34的阻尼力,通过刚度运算公式,控制空气分配阀33对空气弹簧31进行充放气,调节空气弹簧31刚度k所述刚度运算公式为: k=dp/dh;其中p为空气弹簧压力传感器15反馈得到空气弹簧压力值;h为空气弹簧高度传感器14反馈得到空气弹簧31的垂直位移值h;刚度k为空气弹簧31内的压力值p对垂直位移值h通过公式微分求导得到。
30.通过下述公式计算所述cdc减振器等效阻尼系数c;c = f1/v;其中f1为cdc减振器当前阻尼力; v为车身垂直加速度传感器12反馈得到的车身振动速度,当车身垂直速度v一定时,只需控制cdc减振器阻尼力f1就可以控制cdc减振器等效阻尼系数c。
31.所述控制电流运算公式为; i = k1x1/ n;其中k1为电磁阀弹簧刚度,x1为cdc减振器电控阀弹簧调整后需要得到的变形量,n为电控阀的线圈圈数。
32.所述cdc减振器34串接有空气弹簧开卷活塞341,所述空气弹簧开卷活塞341与空气弹簧31的皮囊311下端装配连接,所述皮囊311的上端与空气弹簧31连接座的气室312装配连接,所述cdc减振器34的活塞杆342上端装配在气室312内,所述活塞杆342的上端设有缓冲块343,所述cdc减振器34的外缸体344与活塞杆342的封口部装配有油封345,所述cdc减振器34通过接收pwm模块22发出控制电流i,控制cdc减振器34电磁阀346运动,调整cdc减振器34的阻尼力。
33.通过下述公式计算所述空气弹簧31的承载载荷m;m=p/a;其中,p为空气弹簧压力传感器15反馈得到空气弹簧压力,a为空气弹簧的有效面积。
34.通过下述公式计算所述cdc减振器34阻尼力f1;f1= x1f0 /x0;其中x1为cdc减振器34电控阀弹簧调整后的变形量,x0为cdc减振器电控阀弹簧调整前的变形量,f0为cdc减振器调整前的阻尼力;x0与x1通过在cdc减振器34当前阻尼力下的空气弹簧压力传感器15反馈获得。
35.所述信息采集单元1还包括预检测模块11,所述数据分析控制单元2还包括can模块23,所述can模块23与预检测模块11及ecu21通讯连接。
36.所述预检测模块11包括超声波信号传感器,所述超声波信号传感器设置在车轮前方的车头上,用于按照设定角度激励超声波,并将接收的回波信号通过can模块23输送至ecu21。
37.所述预检测模块11包括光学照相机,所述光学照相机设置在车轮前方的车头上,用于对车头前方拍摄的图像识别,并将接收的图像识别通过can模块23建立预检测信号模型再输送至ecu21。
38.汽车智能电控悬架减振系统由于装配了多个传感器、电子控制单元(ecu21)和执行单元3,能够根据不同的车速、行驶状态、装载质量以及乘客人数的变化,对空气悬架的刚度、cdc减振器34的阻尼力以及车身的高度等项目自动地进行调节,无需驾驶人员调节,大大提高了乘坐的舒适性和操纵的稳定性。
39.汽车智能电控悬架减振系统采集车身垂直速传感器12、车轮垂直速传感器13,由ecu21计算和处理后,指令cdc减振器34执行动作,以调节cdc减振器的阻尼力。当汽车急转弯、急加速和紧急制动时,能够抑制汽车后挫(后仰)、点头和侧翻,防止汽车剧烈变化,提高车辆的操纵稳定性。通过改变空气悬架刚度的方式,使汽车能够按照实际行驶的需要,自由地选择模式。
40.汽车智能电控悬架减振系统通过控制空气压缩机32与空气分配阀33动作,使空气弹簧自动压缩或伸长,从而降低或升高底盘的离地间隙,使车身保持在合适的高度上。当汽车高速行驶时,让车身高度降低,以减小空气阻力,提高操纵的稳定性;当汽车在坏路上行驶时,让车身高度增加,以提高汽车的通过性;当关闭点火开关时,因乘客和行李减少,又让车身高度降低,以保持良好的驻车状态。
41.本系统还可具备如下功能;抗后挫(后仰):通过节气门处加装传感器从而检测踏板移动速度和位移,当车速低于10km/h且加速度大时,执行单元3通过将空气悬架的刚度和cdc减振器的阻尼力调到高值,从而抵抗汽车起步时身后挫(后仰)。
42.抗侧倾:通过在转向轴上加装转向传感器检测转向盘的操作状况。在急转弯时,执行单元通过使空气悬架的刚度和cdc减振器的阻尼力调到高值,以抵抗车身侧倾。
43.抗“点头”:在车速高于50km/h时紧急制动,执行单元通过使空气悬架的刚度和cdc减振器的阻尼力调到高值,而不管驾驶员选择了何种控制状态,以抵抗车身前部的下俯。
44.高速感应:当车速大于90km/h时,系统将空气悬架的刚度和cdc减振器的阻尼力调至中间值,从而提高高速行驶时的操纵稳定性。既使驾驶员选择了常规值自动控制状态,也就是刚度和阻尼力处于低、软值时,系统也将刚度和阻尼力调至中间值。
45.前、后关联控制:车速在30
‑
80km/h范围内时,若前轮空气弹簧高度传感器检测出路面有小凸起,则在后轮越过该凸起之前,系统将使空气悬架的刚度和cdc减振器的阻尼力调至低值,从而提高汽车乘坐舒适性。此时既使驾驶员选择了“高速行驶时自动控制”状态,空气悬架的刚度和cdc减振器的阻尼力为中间值,系统仍将刚度和阻尼力调至低值。
46.坏路、俯仰、振动感应:车速在40
‑
90km/h范围内,当空气弹簧高度传感器检测出路面有较大凸起时,系统将空气悬架的刚度和cdc减振器阻尼力调至中间值,以抑制车体的前后颠簸、振动等大动作, 从而提高汽车的乘坐舒适性和通过性。
47.车身高度控制:车身的高度可根据汽车内乘坐人员或车辆载重情况自动做出调
整,以保持汽车行驶所需要的高度及汽车行驶状态的稳定,由前轮和后轮空气弹簧高度传感器向ecu发出车高信号,ecu发出指令来控制空气悬架进行车身高度调整。
48.车身需要升高时,ecu控制空气压缩机通过空气分配阀使压缩空气进入空气弹簧的主气室,使空气弹簧伸长,车身升高,当车身需要降低时,ecu控制空气压缩机与空气分配阀使空气弹簧主气室中压缩空气排到大气中去,空气弹簧压缩,车身降低。在空气弹簧的主、辅助气室之间有cdc减振器,进行流量控制,使主、辅气室之间的气体流量发生变化,因此而改变悬架的空气弹簧刚度。
49.多组数据测试:对比数据1:为汽车空载状态下在无人路段行驶中的检测及计算数据;对比数据2:为同一辆汽车满载情况下在同一路段行驶的检测及计算数据; k (km/m)m1/4悬架质量(n)c(ns/m)ξ悬架系统阻尼比1空载47627574810.222满载486925116200.32 p空气弹簧压力a空气弹簧面积m1/4悬架质量1空载0.45723562752满载0.4972356925 f1减振器当前阻尼力v车身震动速度c减振器阻尼系数1空载38900.5274812满载60420.5211620 k电磁阀弹簧刚度x1电磁阀弹簧变形量n电磁阀线圈圈数i电磁阀电流1空载470.513040.8a2满载480.133040.2a k (km/m)m1/4悬架质量(n)c(ns/m)ξ悬架系统阻尼比1空载47627574810.222满载486925116200.32
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1