动力传动系统齿隙控制系统的制作方法
[0001]
本实用新型总体上涉及电动车辆,并且更具体地,涉及配置成消除电动车辆的动力传动系统中的机械齿隙的控制系统。
背景技术:
[0002]
车辆的动力传动系统中的部件将由车辆的电动机或发动机产生的输出传递至车轮。这些部件中的许多部件(例如变速器、驱动轴和差速器)都利用齿轮的布置来完成此动力传递。由于制造工艺的限制,以及需要一定的间隙程度以允许在各种温度下运行,齿轮之间存在一定程度的自由活动,这通常称为齿隙(backlash)。图1示出了两个齿轮103和104之间的齿隙101。由于典型电动机的重量以及电动机与车轮之间通常较高的传动比(例如10∶ 1),电动车辆加剧了这样的问题。另外,考虑到电动车辆使用再生制动,正扭矩和负扭矩之间的过渡更加频繁和激烈。
[0003]
车辆的动力传动系统中的齿隙主要涉及的是振动和噪声,这些噪声是在各种齿轮联动装置中的齿隙在横向切换时产生的,例如,当汽车在加速和制动之间转换时,反之亦然。每次齿隙横向切换时,车辆的驾驶员和乘客都会感觉到汽车的停顿或颠簸,这种感觉通常伴随着齿轮齿相互撞击的噪音。
[0004]
汽车设计者采用不同的技术来克服这个问题,从而为他们的乘客提供更平稳、更少颠簸的乘坐。通常,这些技术采用将一种机械过滤器插入在动力传动系统各元件之间。例如,可以在车辆的传动轴和差速器之间插入挠性橡胶联轴器,该橡胶联轴器吸收了动力传动系统齿隙引起的大部分振动。除了机械过滤之外,汽车设计人员还利用各种发动机控制系统执行该相同的功能,其中控制系统会估算齿隙,然后使用反馈系统将其影响降至最低。不幸的是,尽管滤波技术确实减轻了动力传动系统齿隙的影响,但它们也降低了动力传动系统的响应能力。因此,需要一种在不降低车辆响应性的情况下最小化(即使不是全部一起消除)动力传动系统齿隙的影响的系统。本实用新型提供了这样的控制系统。
技术实现要素:
[0005]
本实用新型提供了一种用于电动车辆(ev)的动力传动系统齿隙控制系统,该控制系统包括(i)第一动力传动系统,该第一动力传动系统包括一个或多个电动机并且被配置为沿向前方向推进ev;(ii)第二动力传动系统,该第二动力传动系统包括一个或多个电动机,并且被配置成在向后方向上推进ev;以及(iii)车辆控制器,其耦合至第一和第二动力传动系统,该车辆控制器配置成将多个前向扭矩需求传输至第一动力传动系统,并将多个反向扭矩需求传输至第二动力传动系统,其中挂上挡位(in-gear)的ev操作期间,车辆控制器在第一动力传动系统上至少保持最小前向扭矩需求,并且在第二动力传动系统上至少保持最小反向扭矩需求,其中最小前向扭矩需求大于零且最小反向扭矩需求大于零。在挂上挡位的ev操作期间,当ev停止时,最小前向扭矩需求被最小反向扭矩需求抵消,从而阻止了ev在向前或向后的方向上移动。
[0006]
一方面,控制系统可以进一步包括耦接至车辆控制器的油门组件。油门组件被配置成从ev的驾驶员接收扭矩请求并将扭矩请求发送至车辆控制器,其中扭矩请求从可能的扭矩请求的范围内选择,该扭矩请求的范围包括前向扭矩请求的范围和反向扭矩请求的范围。在接收到扭矩请求之后,车辆控制器将对应的扭矩需求发送到第一和第二动力传动系统中的至少一个,其中对应的扭矩需求从多个前向扭矩需求和多个反向扭矩需求中选择。
[0007]
在另一方面,当扭矩请求对应于前向扭矩请求时,车辆控制器可以被配置为将扭矩请求与预设值进行比较。如果扭矩请求超过预设值,则车辆控制器可以被配置为暂时停止向第二动力传动系统发送反向扭矩需求并且将前向扭矩需求发送至第二动力传动系统。类似地,当扭矩请求对应于反向扭矩请求时,车辆控制器可以被配置为将扭矩请求与第二预设值进行比较。如果扭矩请求超过第二预设值,则车辆控制器可被配置为暂时停止向第一动力传动系统发送前向扭矩需求并将反向扭矩需求发送至第一动力传动系统。预设值可对应于可从第一动力传动系统获得的最大扭矩。第二预设值可对应于可从第二动力传动系统获得的最大扭矩。
[0008]
另一方面,当扭矩请求对应于前向扭矩请求时,车辆控制器可以被配置为将当前车速与预设值进行比较。如果当前车辆速度超过预设值,则车辆控制器可以被配置为暂时停止向第二动力传动系统发送反向扭矩需求,并且向第二动力传动系统发送前向扭矩需求。类似地,当扭矩请求对应于反向扭矩请求时车辆控制器可以被配置为将当前车辆速度与第二预设值进行比较。如果当前车辆速度超过第二预设值,则车辆控制器可以被配置为暂时停止向第一动力传动系统发送前向扭矩需求,并将反向扭矩需求发送至第一动力传动系统。
[0009]
通过参考说明书的其余部分和附图,可以实现对本实用新型的本质和优点的进一步理解。
附图说明
[0010]
应该理解的是,附图仅用于说明而非限制本实用新型的范围,并且不应视为按比例绘制。另外,在不同附图上的相同附图标记应被理解为指代相同部件或具有相似功能的部件。
[0011]
图1示出了两个齿轮之间的齿隙,其中仅示出了每个齿轮的一部分;
[0012]
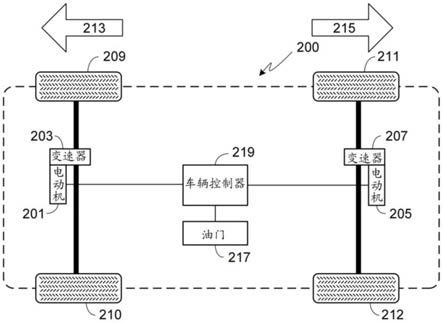
图2示出了具有两个电动机的ev中的本实用新型的优选实施例;
[0013]
图3示出了除每个车辆的电动机施加的扭矩的方向以外,与图2所示的实施例类似的实施例;
[0014]
图4a至4c示出了使用虚拟驾驶周期的本实用新型,图4a以图形方式示出了加速器踏板的踩下,图4b以图形方式示出了车辆速度,以及图4c 以图形方式示出了电动机扭矩;
[0015]
图5示出了除使用三个而不是两个电动机以外,与图1和图2所示的实施例相似的实施例;
[0016]
图6示出了除使用四个而不是两个电动机之外,与图2和图3所示的实施例相似的实施例;
[0017]
图7a至图7c示出了使用虚拟驾驶周期的系统的变体,其中图7a以图形方式示出了加速器踏板的踩下,图7b以图形方式示出了车辆速度,图7c 以图形方式示出了电动机扭
矩;和
[0018]
图8a至图8b示出了使用虚拟驾驶周期的系统的变体,其中图8a以图形方式示出了车辆速度,且图8b以图形方式示出了电动机扭矩。
具体实施方式
[0019]
如在本文中所使用的单数形式“一”、“一个”和“该”也意图包括复数形式,除非上下文另外明确指出。如本文中所使用的术语“包括”、“正包括”、“包含”和/或“正包含”指定存在所陈述的特征、整体、步骤、操作、元素和/或部件,但是不排除一个或多个其他特征、整体、步骤、操作、元素、部件和/或其组的存在或添加。如本文所使用的术语“和/或”和符号“/”旨在包括一个或多个相关联的所列项目的任意的和所有的组合。另外,尽管这里可以使用术语第一、第二等来描述各种步骤或计算,但是这些步骤或计算不应受到这些术语的限制,而是这些术语仅用于将一个步骤或计算与另一步骤或计算区分开。例如,第一计算可以称为第二计算;类似地,第一步骤可以称为第二步骤;类似地,第一部件可以被称为第二部件,而不背离本公开内容的范围。如本文所使用的术语“电池组”是指电互连以实现期望的电压和容量的一个或多个电池。术语“电动汽车”和“ev”可以互换使用,并且可以指的是全电动汽车、插电式混合动力汽车(也称为phev)或混合动力汽车(也称为hev),其中混合动力汽车利用多种推进力来源,包括电力驱动系统。如本文所使用的,“前向扭矩”是指沿行进的向前方向施加的扭矩,而“反向扭矩”是指沿行进的向后方向施加的扭矩。因此,如果汽车在向前行驶,则前向扭矩是指促进和保持汽车向前运动的电动机扭矩,而反向扭矩是指在相反方向上施加以使汽车减速或反向行驶的电动机扭矩。此外,在 ev中,可以通过再生制动施加反向扭矩以减慢车辆的向前行驶,而且可以通过再生制动施加前向扭矩以减慢车辆的向后行驶。
[0020]
根据本实用新型,通过在特定动力传动系统内将电动机扭矩始终保持在相同方向上来消除动力传动系统齿隙。当应用于需要在向前和向后两个方向上均提供行驶方式的车辆时,应当理解的是本实用新型限于包括至少两个动力传动系的ev,其中一个用于在向前的方向上推进车辆,而一个用于在向后的方向上推进车辆。
[0021]
图2示意性地示出了优选实施例的实现。如图所示,ev 200包括第一电动机201和变速器203以及第二电动机205和变速器207。电动机201/变速器203向车轮209和210提供扭矩,而电动机205/变速器207向车轮211 和212提供扭矩。
[0022]
为了消除先前描述的动力传动系统齿隙的问题,电动机201和变速器 203仅提供前向扭矩,从而沿方向213推进车辆200。类似地,电动机205 和变速器207仅提供反向扭矩,从而沿方向215推进车辆200。为了防止齿隙,电动机201总是提供前向扭矩,而电动机205总是提供反向扭矩。任一电动机施加的扭矩的量取决于驾驶员期望的行驶方向。例如,如果驾驶员在向前的方向(即方向213)上加速,则电动机201产生较大的前向扭矩。同时,电动机205产生较小的反向扭矩。当驾驶员希望减速或反方向时,电动机205所产生的反向扭矩的量足以确保该动力传动系统中不存在齿隙,而且足够小以至于对向前车辆行驶和总体车辆效率没有相对明显的影响。当驾驶员决定减速时,假设车辆在摩擦制动以外或代替摩擦制动而采用再生制动,则由电动机201产生的前向扭矩减小,而由电动机205产生的反向扭矩增大。类似地,如果驾驶员希望沿向后方向(即方向215)行驶,则电动机205会产生较大的反
向扭矩,而电动机201会同时产生较小的前向扭矩。正如在先前的示例中,由电动机201产生的前向扭矩的量足以确保该动力传动系统中没有齿隙,同时又足够小以至于对向后的车辆行驶和总体车辆效率没有相对明显的影响。注意,当车辆静止且处于挡位内时(即,与停车相反),电动机201产生少量的前向扭矩,且电动机205产生少量的反向扭矩,前向扭矩的量足以抵消电动机205产生的反向扭矩,而又不会大到足以引起向前的车辆行驶。类似地,反向扭矩的量足以抵消电动机201产生的前向扭矩,而又不会大到足以引起向后的车辆行驶。
[0023]
在先前的示例中,电动机201仅提供前向扭矩,且电动机205仅提供反向扭矩。应当理解的是如果电动机201仅用于产生反向扭矩(即,导致车辆沿方向215行驶)并且电动机205仅用于产生前向扭矩(即,导致车辆沿方向213行驶),则也可获得相同的益处。图3所示的车辆300示出了这种配置。
[0024]
图4a至图4c示出了使用虚拟驾驶周期的本实用新型。在该示例中,驾驶周期被划分为七个时间段,具体地,(i)车辆停止(区域401);(ii)车辆在向前方向上加速(区域402);(iii)使用再生制动使车辆减速(区域403);(iv)车辆停止(区域404);(v)车辆在向后方向上加速(区域405);(vi) 使用再生制动使车辆减速(区域406);(vii)车辆停止(区域407)。图4a 以图形方式示出了加速器踏板的下压,其中加速器踏板具有在完全下压(即, 100%下压)和完全释放(即0%下压)之间的移动范围。图4b以图形方式示出了车速,其中向前的车辆移动显示为正值,而向后的车辆移动显示为负值。图4c以图形方式示出了电动机扭矩,其中,前向扭矩被示出为正值(实线411),反向扭矩被示出为负值(虚线413)。由于本实用新型的应用,前向扭矩保持为正且反向扭矩保持为负,从而消除了在电动机改变符号(即,从前向扭矩变为反向扭矩或从反向扭矩变为前向扭矩)时引起的齿隙。
[0025]
假设使用图2所示的实施例,则在该虚拟驾驶周期中的前向扭矩由电动机201产生,而反向扭矩由电动机205产生。假设使用图3所示的实施例,在该虚拟驾驶周期中的前向扭矩由电动机205产生,反向扭矩由电动机201 产生。如图4a至图4c所示,在第二时间段(区域402)中,汽车连续加速,即,汽车从未达到稳态速度。类似地,在第五时间段(区域405)中,汽车在向后方向上连续加速,即,汽车从未达到稳态速度。
[0026]
尽管以上所提供的本实用新型的图示采用两个电动机,即,一个电动机提供前向扭矩且一个电动机提供反向扭矩,但是如前所述,本实用新型可等同地应用于采用多于两个电动机的ev。例如,在图5所示的实施例中,两个电动机501和502向车轮503和504提供扭矩(例如,前向扭矩),以便沿方向505推进车辆500。在该实施例中,单个电动机507向车轮509和510 提供扭矩(例如,反向扭矩),以沿方向511推进车辆500。在又一示例中,车辆600(图6)采用两个电动机601和602向车轮603和604提供扭矩(例如,前向扭矩)以便沿方向605推进车辆600,并且两个电动机607和608 向车轮609和610提供扭矩(例如,反向扭矩)以沿方向611推进车辆600。
[0027]
上述方法消除了动力传动系统齿隙,并因此消除了典型地伴随动力传动系统齿隙的颠簸和噪声。但是,由于每个电动机都连续地施加与车辆的另一电动机所产生的扭矩相反的扭矩,因此车辆动力传动系统效率降低了。尽管退化的程度被最小化使得仅少量的扭矩必须被产生以消除动力传动系统的齿隙,但是应当理解,在某些场景下,即使少量的退化也是不期望的。除了由于至少一个电动机产生的扭矩与至少一个其他电动机产生的扭矩相反而导致效率损失之外,上述方法也没有利用ev的组合电动机能力的全部优势。显然在两
台电动机ev中,当两台电动机一致地运行而不是相互抵消时,可以实现额外的加速度和最高速度。为了克服这些限制,发明人设想了对上述系统的若干修改。
[0028]
在上述系统的一种变体中,车辆的系统控制器监视驾驶员所请求的扭矩需求(t
d
)。驾驶员通过按下或以其他方式接合加速器(也称为油门)来请求扭矩需求。在正常情况下,如上所述,随着驾驶员增加他们的扭矩需求,在请求方向上产生扭矩(即,前向扭矩或反向扭矩)的电动机会增加所产生的扭矩,而在相反方向(即反向扭矩或前向扭矩)产生扭矩的电动机产生最小扭矩,从而消除了动力传动系统的齿隙。然而,在这种改进的方法中,当驾驶员请求的扭矩超过在请求方向上产生扭矩的电动机所能产生的扭矩时,用于在相反方向上产生扭矩的电动机在该请求方向上提供附加的扭矩。例如,假设如图2所示的两个电动机配置,如果驾驶员请求向前移动(即,通过将汽车置于前进档)并向下踩加速器(或以其他方式激活油门217)至一定程度,扭矩需求(t
d
)不能由电动机201产生的最大扭矩(t
p-max
)来满足,那么在改进的系统中,车辆控制器219将利用电动机205来产生附加的向前扭矩。换句话说,如果t
d
大于t
p-max
,则车辆控制器采用电动机201和205 两者来满足扭矩需求。
[0029]
应当理解,在以上变体的系统中,系统控制器219可以被配置为将t
d
与预设值进行比较而不是与t
p-max
进行比较。例如,系统控制器210可以配置为将t
d
与为90%的t
p-max
的扭矩值进行比较,从而避免将动力传动系置于不必要的压力下。
[0030]
图7a至图7c示出了使用虚拟驾驶周期的改进系统。该示例中的驾驶周期被划分为八个时间段,具体地(i)车辆停止(区域701);(ii)车辆在向前方向上逐渐加速(区域702);(iii)车辆保持恒定速度(区域703);(iv) 车辆使用再生制动减速(区域704);(v)车辆停止(区域705);(vi)车辆沿向前方向迅速加速(区域706);(vii)车辆使用再生制动减速(区域707); (viii)车辆停止(区域708)。图7a以图形方式示出了加速器踏板的下压。图7b以图形方式示出了车辆速度。图7c以图形方式示出了电动机扭矩,其中,由主要用于前向扭矩的电动机提供的扭矩显示为实线711,且由主要用于反向扭矩的电动机提供的扭矩显示为虚线713。注意,在时段706期间,当驾驶员通过将加速器踏板踩到底来要求迅速加速(例如,踏板踩下100%) 时,线713会短暂地从负值(反向扭矩)切换为正值(前向扭矩)。这样,在短暂的时间段内,前向扭矩动力传动系统和反向扭矩动力传动系统都向车辆供应前向扭矩。一旦对前向扭矩(t
d
)的需求降至低于前向扭矩动力传动系统可提供的最大扭矩(t
p-max
)或低于预设扭矩值,则反向扭矩动力传动系统将如图所示切换回负扭矩值。
[0031]
在本实用新型的系统的另一种变体中,车辆的系统控制器监视车速。在低速操作期间,车辆在提供向前运动的动力传动系统上保持前向扭矩,并在提供向后运动的动力传动系统上保持反向扭矩,从而消除了动力传动系统的齿隙。这样,在车辆的低速运行期间,当动力传动系统的齿隙最为明显时,该系统如最初所描述的并在图4a至图4c中所示出的那样运行。一旦达到预设速度(例如30mph),车辆控制器219将恢复到常规动力传动系统操作,此时所有ev的动力传动系统(即,前向扭矩动力传动系统和反向扭矩动力传动系统)一致地运行,以在同一方向上产生扭矩。这种方式的操作持续进行,直到车速降到预设速度以下为止,这时系统恢复到本实用新型的系统,从而通过在提供前向扭矩的动力传动系统上保持前向扭矩和在提供反向扭矩的动力传动系统上保持反向扭矩来消除齿隙。
[0032]
图8a和图8b示出了使用虚拟驾驶周期的速度敏感型变体系统。在此图示中,假设预设速度设置为大约30mph。图8a以图形方式示出了车速,而图8b以图形方式示出了电动机
扭矩,其中,主要用于前向扭矩的动力传动系统提供的扭矩被示为实线817,而主要用于反向扭矩的动力传动系统提供的扭矩被示出为虚线819。在本示例中,驾驶周期划分为15个时间段,具体地(i)车辆停止(区域801);(ii)车辆在向前方向上逐渐加速(区域802); (iii)车辆保持约15mph的恒定速度(区域803);(iv)车辆使用再生制动减速(区域804);(v)车辆停止(区域805);(vi)车辆沿向后方向逐渐加速(区域806);(vii)车辆在向后方向上保持大约10mph的恒定速度(区域 807);(viii)车辆使用再生制动减速(区域808);(ix)车辆停止(区域809); (x)车辆逐渐加速至约70mph(区域810);(xi)车辆保持约70mph的恒定速度(区域811);(xii)车辆减速至大约15mph(区域812);(xiii)车辆在向前方向上保持大约15mph的恒定速度(区域813);(xiv)车辆使用再生制动使减速(区域814);(xv)车辆停止(区域815)。注意,在时间段810 中,随着车辆从0mph逐渐加速到70mph,前向扭矩最初仅由前向动力传动系统提供。在速度超过预设速度(例如30mph)之后,反向动力传动系统也会提供前向扭矩。当汽车以70mph的速度巡航时,在时间段811期间前向和反向扭矩动力传动系统都提供前向扭矩。当车辆在减速时间段812期间减速至15mph时,反向扭矩动力传动系统将提供再生制动。然后,当车辆以恒定的15mph行驶时(区域813),仅前向扭矩动力传动系统提供扭矩。
[0033]
应该理解的是,尽管本文为变体系统提供了分别的示例,其中(i)扭矩需求用于确定ev的前向和反向扭矩动力传动系统在何时一致地运行,以及 (ii)车速用于确定ev的前向和反向扭矩动力传动系统在何时一致地运行,发明人明确地设想了一种系统,其中将这两种变体组合为一个系统。在这样的系统中,在正常操作下,即当扭矩需求t
d
不超过预设扭矩值(例如t
p-max
) 并且车速不超过预设值(例如30mph)时,在前向扭矩动力传动系统中保持前向扭矩,而在反向扭矩动力传动系统中保持反向扭矩,以便消除动力传动系统的齿隙。每当扭矩需求超过预设扭矩值或车速超过预设值时,前向和反向扭矩动力传动系统两者一起运行以在所需方向上生成扭矩。
[0034]
由于特定的动力传动系统扭矩值取决于所讨论的动力传动系统的细节 (例如,电动机特性等),因此应当理解,在图4a至图4c、图7a至图7c 和图8a/8b所示的示例性驾驶周期中提供的扭矩值仅旨在说明而非限制本实用新型。
[0035]
为了帮助理解本实用新型的细节已经概括地描述了本系统和方法。在某些情况下,众所周知的结构、材料和/或操作没有具体示出或详细描述,以避免掩盖本实用新型的方面。在其他情况下,给出了具体细节以便提供对本实用新型的透彻理解。相关领域的技术人员将认识到,本实用新型可以以其他特定形式来体现,例如以适应特定的系统或装置或情况或材料或部件,而不背离本实用新型的精神或基本特征。因此,本文的公开和描述旨在说明而不是限制本实用新型的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1