用于预测车辆轨迹的装置和方法与流程
1.本发明涉及一种用于预测车辆轨迹的装置和方法。
背景技术:
2.cn 108803617公开了使用人工神经网络的相关装置的方面。
技术实现要素:
3.期望进一步改进预测。
4.这通过根据权利要求1和9所述的方法和装置来实现。
5.用于预测车辆轨迹的方法包括:根据由第一车辆的第一传感器捕获的第一数据,确定第二车辆的第一位置、第一加速度、第一速度和第一横摆率,其中根据所述第一位置、所述第一加速度、所述第一速度和所述第一横摆率,利用车辆模型来确定用于所述轨迹的预测的第一点列表,根据由所述第一车辆的第二传感器捕获的第二数据,确定所述第二车辆的第二位置、第二加速度、第二速度和第二横摆率,其中根据所述第二位置、所述第二加速度、所述第二速度和所述第二横摆率,利用所述车辆模型来确定用于所述轨迹的所述预测的第二点列表,其中根据所述第一点列表和所述第二点列表来确定用于所述轨迹的所述预测的模型的参数,并且其中根据由这些参数限定的所述模型来确定所述轨迹的所述预测。除非针对第二车辆的历史数据可用,否则传感器中的每一者的数据被独立地用于确定位置、加速度、速度和横摆率。用于此的车辆模型可以是cyra模型。由此,每个传感器的点列表独立于其他传感器数据来确定。通过对这些点拟合曲线来确定预测。所得到的轨迹预测与第二车辆的实际轨迹非常吻合。
6.优选地,根据由所述第一传感器在预定的第一时间段中捕获的第一数据,确定所述第二车辆在所述第一时间段中的第一位置列表,其中根据由所述第二传感器在所述预定的第一时间段中捕获的第二数据,确定所述第二车辆在所述第一时间段中的第二位置列表,其中根据所述第一位置列表和所述第二位置列表来确定所述模型的所述参数。如果针对第二车辆的历史数据可用,则来自第二车辆的先前轨迹的位置被用于进一步改进曲线拟合。
7.优选地,第一时间段的长度介于0.1秒与5秒之间,优选地为1秒。
8.优选地,根据由所述第一车辆的所述第一传感器捕获的第三数据,确定第三车辆的第三位置、第三加速度、第三速度和第三横摆率,其中根据所述第三位置、所述第三加速度、所述第三速度和所述第三横摆率,利用所述车辆模型来确定用于所述轨迹的预测的第三点列表,其中根据由所述第一车辆的所述第二传感器捕获的第四数据,确定所述第四车辆的第四位置、第四加速度、第四速度和第四横摆率,其中根据所述第四位置、所述第四加速度、所述第四速度和所述第四横摆率,利用所述车辆模型来确定用于所述轨迹的所述预测的第四点列表,其中根据所述第一点列表、所述第二点列表、所述第三点列表和所述第四点列表来确定用于所述第二车辆的所述轨迹的预测的参数,和/或,其中根据所述第一点列
表、所述第二点列表、所述第三点列表和所述第四点列表,利用用于所述第三车辆的所述轨迹的所述预测的模型来确定用于所述第三车辆的所述轨迹的所述预测的参数。这改进了预测,因为轨迹也是基于第三车辆预测的。优选地,第一车辆周围的多个车辆的数据被捕获并类似地使用。
9.优选地,根据由所述第一传感器在所述预定的第一时间段中捕获的第三数据,确定所述第三车辆在所述第一时间段中的第三位置列表,其中根据由所述第二传感器在所述预定的第一时间段中捕获的第四数据,确定所述第三车辆在所述第一时间段中的第四位置列表,其中根据所述第一位置列表、所述第二位置列表、所述第三位置列表和所述第四位置列表来确定针对所述第二车辆的所述模型的所述参数和/或针对所述第三车辆的所述模型的所述参数。这进一步改进了曲线拟合。
10.优选地,所述第一传感器和所述第二传感器是雷达传感器、相机和激光雷达传感器的组中的不同传感器。
11.优选地,通过最小二乘法来确定所述参数。
12.优选地,通过二次规划确定轨迹的预测。
13.优选地,根据车辆模型确定轨迹的预测提前最多0.4秒的第二时间段,和/或,根据车辆模型并且根据在所述第一时间段中捕获的数据确定轨迹的预测提前0.4秒至5秒之间的第三时间段。
14.用于预测车辆的轨迹的装置包括处理器,所述处理器适于处理来自雷达传感器、相机和激光雷达传感器的组中的两个不同传感器中的至少一者的输入数据,并且适于执行该方法。
附图说明
15.从下面的描述和附图中可以得出进一步有利的实施方案。在附图中:
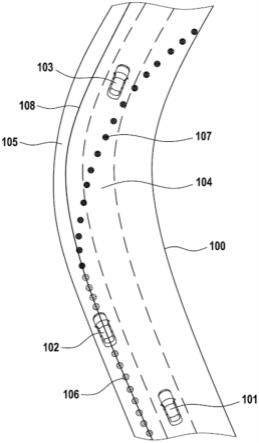
16.图1示意性地描绘了道路,
17.图2描绘了用于预测轨迹的方法中的步骤。
具体实施方式
18.图1描绘了道路100、第一车辆101、第二车辆102和第三车辆103。
19.第一车辆101包括用于预测第二车辆102和/或第三车辆103的轨迹的装置。
20.该装置包括处理器,该处理器适于处理雷达传感器、相机和激光雷达传感器的组中的至少两个不同传感器的输入数据,并且适于执行下述方法的步骤。
21.在该示例中,第一车辆101包括第一传感器和第二传感器。在该示例中,第一传感器和第二传感器是雷达传感器、相机和激光雷达传感器的组中的不同传感器。
22.在该示例中,第一传感器是相机。在该示例中,第二传感器是雷达传感器。也可提供第三传感器,例如激光雷达传感器。
23.在该示例中,第一车辆101在道路100的三条车道的中间车道104上移动。在该示例中,第二车辆在中间车道104左侧的车道105上沿第一车辆101和第二车辆102的行驶方向移动。在该示例中,第三车辆103在中间车道104上移动。
24.图1中描绘的是第二车辆102的历史轨迹106。图1中描绘的是由用于第二车辆102
的车辆模型预测的轨迹107。图1中描绘的是对已经由下面描述的方法针对第二车辆确定的轨迹108的预测。
25.用于预测第二车辆102的轨迹108的方法包括以下步骤202:
26.a)用第一车辆101的第一传感器捕获表征第二车辆102的第一位置、第一加速度、第一速度和第一横摆率的第一数据;
27.b)用第一车辆101的第二传感器捕获表征第二车辆102的第二位置、第二加速度、第二速度和第二横摆率的第二数据。
28.该方法可包括用第一传感器捕获表征第三车辆103的第三位置、第三加速度、第三速度和第三横摆率的第三数据。
29.该方法可包括用第二传感器捕获表征第三车辆103的第四位置、第四加速度、第四速度和第四横摆率的第四数据。
30.该方法可包括在预定的第一时间段中用第一传感器和第二传感器捕获数据。
31.第一时间段的长度可介于0,1秒与5秒之间,优选地为1秒。在第一时间段中,可确定第一位置列表、第二位置列表、第三位置列表和/或第四位置列表。
32.该方法包括以下步骤204:
33.a)根据第一传感器的针对第二车辆102的数据确定第二车辆102的第一位置、第一加速度、第一速度和第一横摆率。
34.b)根据第二传感器的针对第二车辆102的数据确定第二车辆102的第二位置、第二加速度、第二速度和第二横摆率。
35.该方法可包括根据第一传感器的针对第三车辆103的数据确定第三车辆103的第三位置、第三加速度、第三速度和第三横摆率。
36.该方法可包括根据第二传感器的针对第三车辆103的数据确定第三车辆103的第四位置、第四加速度、第四速度和第四横摆率。
37.该方法包括以下步骤206:
38.a)根据第一位置、第一加速度、第一速度和第一横摆率,利用车辆模型来确定用于轨迹108的预测的第一点列表,
39.b)根据第二位置、第二加速度、第二速度和第二横摆率,利用车辆模型来确定用于轨迹108的预测的第二点列表。
40.该方法可包括根据第三位置、第三加速度、第三速度和第三横摆率,利用车辆模型来确定用于第三车辆103的轨迹的预测的第三点列表。
41.该方法可包括根据第四位置、第四加速度、第四速度和第四横摆率,利用车辆模型来确定用于第三车辆103的轨迹的预测的第四点列表。
42.该示例中的车辆模型是cyra模型。
43.该方法包括根据第一点列表和第二点列表来确定用于预测第二车辆102的轨迹108的模型的参数的步骤208。
44.用于预测第二车辆102的轨迹108的参数可根据第一点列表、第二点列表、第三点列表和第四点列表,利用用于预测第二车辆102的轨迹108的模型来确定。
45.该方法可包括根据第一点列表、第二点列表、第三点列表和第四点列表,利用用于预测第三车辆103的轨迹的模型来确定用于预测第三车辆103的轨迹的参数。
46.可根据第一位置列表、第二位置列表、第三位置列表和第四位置列表来确定针对第二车辆102的模型的参数和/或针对第三车辆103的模型的参数。
47.可通过最小二乘法或二次规划来估计参数。该参数在示例中限定曲率为k的曲线。
48.该方法包括根据由这些参数限定的模型来确定轨迹108的预测的步骤210。
49.对于每个传感器,用于预测的点列表是独立于其他传感器来确定的。预测是基于对这些点的曲线拟合。如果历史数据可用,则曲线拟合也会考虑来自可用位置列表的先前位置。
50.基于车辆模型对轨迹108的预测可以提前最多0.4秒的第二时间段。
51.基于车辆模型和来自第一时间段的数据对轨迹108的预测可以提前0.4秒至5秒之间的第三时间段。
52.在一个示例中,为了预测轨迹108,第二车辆102的横摆角是用二次规划来估计的,即求解二次规划问题。该示例中的二次规划问题是在假设加速度恒定的情况下定义的:
[0053][0054]
其中y是二次规划问题的解,r是曲率为k的曲线的曲线半径,v是第二车辆102的速度,ω是第二车辆102的横摆率。
[0055]
可求解二次规划问题以估计用于预测第三车辆103的轨迹的横摆角。第二车辆102的轨迹108的预测可根据数据并根据针对第二车辆102的模型和针对第三车辆103的模型的参数来确定。二次规划问题可用于估计横摆角,以预测多个车辆的轨迹。关于由第一车辆101的传感器捕获的不同车辆的预测路径的假设可从这些车辆的轨迹的预测中确定,并且改进对车辆的轨迹的预测。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1