控制装置以及车辆的制作方法
1.本发明涉及控制车辆的行驶的控制装置以及车辆。
背景技术:
2.在以四轮车为代表的车辆中,作为减轻驾驶员的驾驶负担的驾驶辅助技术,已知有一边在本车辆与前行车辆之间维持适当的车间距离一边追随前行车辆行驶的被称为自适应巡航控制(acc)的功能。在acc中,当本车辆接近前行车辆时,测量本车辆与前行车辆的距离、速度差,自动地控制本车辆的加速减速。另外,在acc中,在本车辆与前行车辆之间插入了其他车辆(变更车道而过来)的情况下,自动地切换追随对象的车辆,以使本车辆追随该其他车辆。
3.近年来,深入开展了这样的与acc相关的技术的开发以及研究。例如,在日本特开2019
‑
55675号公报中公开了如下技术:根据在与本车辆的行驶车道相邻的相邻车道上行驶的其他车辆的行为来判定其他车辆是否进行车道变更(插入过来),并根据该判定来控制本车辆的行驶,从而防止本车辆的不必要的加速减速。在该技术中,根据其他车辆的行驶姿势、行驶姿势的时间上的变化、方向指示器的闪烁的有无、其他车辆相对于本车辆的相对位置、该相对位置的变化量等来判定其他车辆是否进行车道变更。
技术实现要素:
4.发明所要解决的问题
5.然而,在日本特开2019
‑
55675号公报所公开的技术中,未考虑在与本车辆的行驶车道相邻的相邻车道上行驶的其他车辆的摇晃。因此,在根据在相邻车道上行驶的其他车辆的行为来判定其他车辆是否进行车道变更时,存在针对其他车辆的单纯的摇晃而判定(误判定)为其他车辆进行车道变更的可能性。这样的误判定成为本车辆的过度的减速控制的主要原因。
6.本发明提供有利于判定存在于与本车辆的行驶车道相邻的相邻车道的其他车辆是否进行车道变更的新技术。
7.用于解决课题的手段
8.作为本发明的一个方面的控制装置是控制车辆的行驶的控制装置,其特征在于,具有:识别部,其识别存在于与本车辆的行驶车道相邻的相邻车道的其他车辆;判定部,其基于由所述识别部识别出的所述其他车辆的行为和针对所述行为进行设定的判定基准,来判定所述其他车辆是否向所述本车辆的行驶车道进行车道变更;以及控制部,其根据所述判定部对所述其他车辆是否进行车道变更的判定结果来控制所述本车辆的行驶,所述判定部根据所述本车辆的行进方向上的所述本车辆与所述其他车辆之间的距离来变更所述判定基准。
9.作为本发明的另一方面的车辆的特征在于,具有:识别部,其识别存在于与本车辆的行驶车道相邻的相邻车道的其他车辆;判定部,其基于由所述识别部识别出的所述其他
车辆的行为和针对所述行为进行设定的判定基准,判定所述其他车辆是否向所述本车辆的行驶车道进行车道变更;以及控制部,其根据所述判定部对所述其他车辆是否进行车道变更的判定结果来控制所述本车辆的行驶,所述判定部根据所述本车辆的行进方向上的所述本车辆与所述其他车辆之间的距离来变更所述判定基准。
10.本发明的进一步的目的或其他方面可通过以下参照附图说明的实施方式来明确。
11.发明效果
12.根据本发明,例如能够提供有利于判定存在于与本车辆的行驶车道相邻的相邻车道的其他车辆是否进行车道变更的新技术。
附图说明
13.图1是表示作为本发明的一个方面的控制装置的构成的框图。
14.图2是用于说明与acc相关的技术中的课题的一个例子的图。
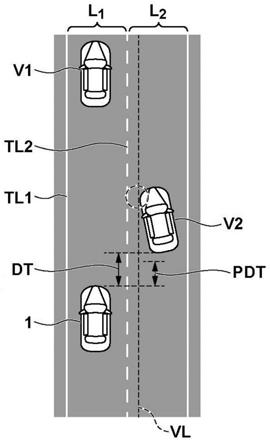
15.图3是用于说明本实施方式中的其他车辆的车道变更的判定处理的图。
16.图4a以及图4b是用于说明本实施方式中的其他车辆的车道变更的判定处理的图。
17.图5a以及图5b是用于说明本实施方式中的其他车辆的车道变更的判定处理的图。
18.图6是用于说明本实施方式中的其他车辆的车道变更的判定处理的图。
具体实施方式
19.以下,参照附图对实施方式进行详细说明。此外,以下的实施方式并非对权利要求书所涉及的发明进行限定,另外,在实施方式中说明的特征的组合未必全部都是发明所必须的。也可以对实施方式中说明的多个特征中的两个以上的特征任意地进行组合。另外,对相同或者同样的构成标注相同的附图标记,并省略重复的说明。
20.图1是表示作为本发明的一个方面的控制装置的构成的框图。图1所示的控制装置是控制车辆1的行驶的、在本实施方式中控制车辆1的自动驾驶的装置。在图1中,以俯视图和侧视图表示车辆1的概略。车辆1例如是轿车型的四轮乘用车(四轮车)。
21.图1所示的控制装置包括控制单元2(控制部)。控制单元2包括利用车内网络而连接为能够通信的多个ecu20至ecu29。ecu20至ecu29分别包括以cpu为代表的处理器、半导体存储器等存储设备、与外部设备的接口等。在存储设备中存储有处理器执行的程序、处理器在处理中使用的数据等。ecu20至ecu29分别也可以具备多个处理器、存储设备以及接口等。
22.以下,对各ecu20至ecu29所分别负责的功能等进行说明。此外,关于ecu的数量、负责的功能,能够适当地设计,可以比本实施方式更细化或整合。
23.ecu20执行与车辆1的自动驾驶相关的控制。在自动驾驶中,自动控制车辆1的转向、加速减速中的至少任一者。如后所述,在本实施方式中,ecu20对转向和加速减速双方进行自动控制。
24.ecu21控制电动动力转向装置3。电动动力转向装置3包括根据驾驶员对方向盘31的驾驶操作(转向操作)对前轮进行转向的机构。另外,电动动力转向装置3包括发挥用于辅助转向操作、或使前轮自动转向的驱动力的马达、检测转向角的传感器等。在车辆1的驾驶状态为自动驾驶的情况下,ecu21与来自ecu20的指示对应地自动控制电动动力转向装置3,控制车辆1的行进方向。
25.ecu22以及ecu23进行检测车辆的周边状况的检测单元41至43的控制以及检测结果的信息处理。检测单元41是拍摄车辆1的前方的摄像机(以下,有时表述为摄像机41)。在本实施方式中,在车辆1的车顶前部设置有两个摄像机41。通过摄像机41拍摄到的图像的解析,能够提取目标物的轮廓、道路上的车道的划分线(例如,白线)等。由此,ecu22以及ecu23能够进行行人、其他车辆的检测,更具体而言,能够识别前方的行人、其他车辆(前方车辆)的类别(大型车、普通车等)、道路信息(人行道、路肩、行驶道路等)、道路上的障碍。
26.检测单元42是光学雷达(lidar:light detection and ranging(例如,是激光雷达),以下,有时表述为光学雷达42)。光学雷达42对车辆1的周围的目标物进行检测,或对与该目标物之间的距离进行测量。在本实施方式中,设置有五个光学雷达42,在车辆1的前部的各角部各设置一个,在后部的中央设置一个,在后部的各侧方各设置一个。检测单元43是毫米波雷达(以下,有时表述为雷达43)。雷达43对车辆1的周围的目标物进行检测,或对与目标物之间的距离进行测量。在本实施方式中,雷达43设置有五个,在车辆1的前部的中央设置有一个,在前部的各角部各设置有一个,在后部的各角部各设置有一个。
27.ecu22进行一方的摄像机41、各光学雷达42的控制以及检测结果的信息处理。ecu23进行另一方的摄像机41、各雷达43的控制以及检测结果的信息处理。这样,通过具备两组检测车辆1的周围状况的装置,使检测结果的可靠性提高,另外,通过具备摄像机、雷达、光学雷达等种类不同的检测单元,能够多方面地进行车辆的周边环境的解析。另外,ecu22以及ecu23分别也能够基于由光学雷达42以及雷达43测量出的与车辆1的周围的目标物的距离来检测车辆1与目标物的相对速度,或者还基于车辆1的绝对速度信息来检测车辆1的周围的目标物的绝对速度。
28.ecu24进行陀螺仪传感器5、gps传感器24b、通信装置24c的控制以及检测结果或者通信结果的信息处理。陀螺仪传感器5检测车辆1的旋转运动。能够根据陀螺仪传感器5的检测结果、车轮速度等来判定车辆1的行进路线。gps传感器24b检测车辆1的当前位置。通信装置24c与提供地图信息、交通信息的服务器进行无线通信,获取这些信息。ecu24能够访问在存储设备中构建的地图信息的数据库24a,进行从当前位置地到目的地的路线搜索等。另外,ecu24包括车与车之间通信用的通信装置24d。通信装置24d与周边的其他车辆进行无线通信,并进行车辆间的信息交换。
29.ecu25对动力装置6进行控制。动力装置6是输出使车辆1的驱动轮旋转的驱动力的机构,例如包括发动机和变速器。ecu25例如与由设置于油门踏板7a的操作检测传感器7a检测到的驾驶员的驾驶操作(油门操作或者加速操作)对应地控制发动机的输出,或者基于车速传感器7c检测到的车速等信息来切换变速器的变速档。在车辆1的驾驶状态处于自动驾驶的情况下,ecu25与来自ecu20的指示对应地自动控制动力装置6,控制车辆1的加速减速。
30.ecu26控制包括方向指示器8(转向灯)的照明器件(前照灯、尾灯等)。在图1的例子中,方向指示器8设置于车辆1的前部、车门后视镜以及后部。
31.ecu27执行对车内的状况进行检测的检测单元9的控制以及检测结果的信息处理。作为检测单元9,在本实施方式中,设置有对车内进行拍摄的摄像机9a和接受来自车内的乘员的信息的输入的输入装置9b。在本实施方式中,摄像机9a设置于车辆1的车顶前部,对车内的乘员(例如驾驶员)进行拍摄。输入装置9b配置于车内的乘员能够操作的位置,是对车辆1进行指示的开关组。
32.ecu28对输出装置10进行控制。输出装置10进行对驾驶员的信息的输出、以及来自驾驶员的信息的输入的接受。声音输出装置10a通过声音向驾驶员通知信息。显示装置10b通过图像的显示向驾驶员通知信息。显示装置10b例如配置在驾驶席的正面,构成仪表板等。另外,在本实施方式中,例示了声音和显示,但也可以通过振动、光来通知信息。另外,也可以将声音、显示、振动或者光中的多个组合来报告信息。
33.ecu29控制制动装置11、驻车制动器(未图示)。制动装置11例如是盘式制动装置,设置于车辆1的各车轮,通过对车轮的旋转施加阻力而使车辆1减速或停止。ecu29例如与由设置在制动踏板7b上的操作检测传感器7b检测到的驾驶员的驾驶操作(制动操作)对应地控制制动装置11的工作。在车辆1的驾驶状态为自动驾驶的情况下,ecu29与来自ecu20的指示对应地自动控制制动装置11,控制车辆1的减速以及停止。制动装置11、驻车制动器也能够为了维持车辆1的停止状态而工作。另外,在动力装置6的变速器具备驻车锁定功能的情况下,也能够为了维持车辆1的停止状态而使驻车锁定功能工作。
34.在这样构成的车辆1中,作为减轻驾驶员的驾驶负担的驾驶辅助技术而提供自动驾驶。在本实施方式中,作为自动驾驶,提供一边在本车辆(车辆1)与前行车辆之间维持适当的车间距离一边追随前行车辆行驶的自适应巡航控制(acc)。在acc中,当本车辆接近前行车辆时,ecu20自动地控制本车辆的加速减速,以使本车辆追随前行车辆。在此,前行车辆是指存在于本车辆的行驶车道的前方的车辆、即在同一车道上行驶在本车辆的前方的车辆。
35.然而,在与acc相关的技术中,存在待改善的课题。例如,实际上,不仅存在本车辆、前行车辆,还存在处于与本车辆的行驶车道相邻的相邻车道上的车辆、即在相邻车道行驶的车辆(以下,表述为其他车辆)。因此,由于还需要考虑其他车辆的行驶来控制本车辆的加速减速,因此在现有技术中,根据其他车辆的行为来判定其他车辆是否进行车道变更(向本车辆与前行车辆之间插入过来)。其中,如图2所示,在本车辆1以追随前行车辆v1的方式在第一车道l1(行驶车道)行驶的情况下,在与第一车道l1相邻的第二车道l2(相邻车道)行驶的其他车辆v2有时在车宽方向上摇晃。在这样的情况下,由于其他车辆v2出现接近第一车道l1的行为,因此在现有技术中,有时根据其他车辆v2的行为(摇晃)而判定(误判定)为其他车辆v2进行车道变更,从而成为本车辆1的过度的减速控制的主要原因。
36.因此,在本实施方式中,在图2所示那样的状况下,ecu20基于其他车辆v2的行为和相对于其他车辆v2的行为而设定的判定基准,判定其他车辆v2是否向本车辆1的行驶车道(第一车道l1)进行车道变更,并根据该判定结果来控制本车辆1的行驶(加速减速)。此时,如图3所示,根据本车辆1的行进方向上的本车辆1与其他车辆v2之间的距离dt,变更判定基准。这样,根据本车辆1与其他车辆v2之间的距离dt而变更判定基准、例如距离dt越长而越放缓其他车辆v2的车道变更的判定基准,由此能够抑制对其他车辆v2的摇晃的误判定(判定为进行车道变更),能够根据距离dt适当地判定其他车辆v2的车道变更。另外,在图3中,本车辆1与其他车辆v2之间的距离dt被定义为本车辆1的前端部与其他车辆v2的后端部之间的距离,但并不限定于此。例如,本车辆1与其他车辆v2之间的距离dt也可以定义为本车辆1的重心与其他车辆v2的重心之间的距离。另外,其他车辆v2的车道变更的判定基准被设定为,在本车辆1与其他车辆v2之间的距离dt较长的情况下、即相对于在远距离处存在的其他车辆v2也能够判定其是否进行车道变更。
37.以下,在本实施方式中,对由ecu20执行的判定处理、即判定其他车辆v2是否进行车道变更的处理进行说明。通过ecu20统一控制车辆1以及控制装置(图1)的各部分来进行该处理。在此,以本车辆1追随前行车辆v1行驶的方式进行acc,将本车辆1正在行驶的行驶车道设为第一车道l1,将与第一车道l1相邻的相邻车道设为第二车道l2。
38.如图4a所示,在本车辆1与其他车辆v2之间的距离dt为规定的距离pdt以上的情况下,ecu20在其他车辆v2的至少一部分跨越划定第一车道l1的车道线tl1及tl2中的第二车道l2侧的车道线tl2的时刻,判定为其他车辆v2进行车道变更。另一方面,如图4b所示,在本车辆1与其他车辆v2之间的距离dt小于规定的距离pdt的情况下,在其他车辆v2的至少一部分跨越设定于第二车道内(第二车道l2的内侧)的假想线vl的时刻,判定为其他车辆v2进行车道变更。这样,在本车辆1与其他车辆v2之间的距离dt较长的情况下,即使其他车辆v2进行了车道变更,由于使本车辆1迅速地减速的必要性低,因此通过将其他车辆v2的车道变更的判定基准设为车道线tl2(放缓判定基准),优先抑制将其他车辆v2的摇晃误判定为车道变更。另一方面,在本车辆1与其他车辆v2之间的距离dt较短的情况下,在其他车辆v2进行了车道变更时,使本车辆1迅速地减速的必要性高,因此,通过将其他车辆v2的车道变更的判定基准设为假想线vl(判定基准变严格),优先提前判定其他车辆v2的车道变更。由此,能够根据本车辆1与其他车辆v2之间的距离dt适当地判定其他车辆v2的车道变更。
39.另外,在本实施方式中,如图4a以及图4b所示,对根据本车辆1与其他车辆v2之间的距离dt而将其他车辆v2的车道变更的判定基准设定为车道线tl2或者假想线vl的情况进行了说明,但并不限定于此。只要随着本车辆1与其他车辆v2之间的距离dt变长而使其他车辆v2的车道变更的判定基准变缓、或者随着本车辆1与其他车辆v2之间的距离dt变短而使其他车辆v2的车道变更的判定基准变严格即可。例如,也可以将判定基准设定为相对于第二车道l2的中央的偏移量。另外,设定于第二车道内的假想线vl也可以相对于本车辆1与其他车辆v2之间的距离dt可变。例如,也可以通过随着本车辆1与其他车辆v2之间的距离dt(<pdt)变短而远离车道线tl2的方式设定假想线vl。
40.另外,在车辆1中,将车速传感器7c设置为获取本车辆的行驶速度的获取部。因此,ecu20可以根据由车速传感器7c获取的本车辆1的行驶速度,变更其他车辆v2的车道变更的判定基准。通常认为,在本车辆1的行驶速度快的情况下,在其他车辆v2进行了车道变更时,使本车辆1迅速减速的必要性高,在本车辆1的行驶速度慢的情况下,即使其他车辆v2进行了车道变更,使本车辆1迅速减速的必要性也较低。因此,在本车辆1的行驶速度快的情况下,与本车辆1的行驶速度慢的情况相比,变更其他车辆v2的车道变更的判定基准,以使得容易判定为其他车辆v2进行车道变更。具体而言,在本车辆1的行驶速度快的情况下,如图4b所示,将其他车辆v2的车道变更的判定基准设为假想线vl(判定基准变严格),在本车辆1的行驶速度慢的情况下,如图4a所示,将其他车辆v2的车道变更的判定基准设为车道线tl2(放缓判定基准)。由此,在本车辆1的行驶速度慢的情况下,优先抑制将其他车辆v2的摇晃误判定为车道变更,在本车辆1的行驶速度快的情况下,优先提前判定其他车辆v2的车道变更,因此能够根据本车辆1的行驶速度适当地判定其他车辆v2的车道变更。
41.另外,在本实施方式中,以进行使本车辆1的行驶追随前行车辆v1的行驶的追随行驶控制的状态、即进行了acc为前提进行了说明,但即使不进行acc,在判定为其他车辆v2进行车道变更的情况下,为了避免与其他车辆的碰撞,也需要进行使本车辆1减速的减速控
制。此时,如上所述,可以根据是否由作为识别(检测)其他车辆v2的识别部发挥功能的检测单元41~43识别到前行车辆v1,变更在减速控制中使本车辆1减速的程度。例如,如图5a所示,在识别出前行车辆v1的情况下,根据前行车辆v1的行驶,向前行车辆v1与本车辆1之间进行了车道变更(插入)的其他车辆v2有可能减速,因此加强在减速控制中使本车辆1减速的程度。另一方面,如图5b所示,在未识别到前行车辆v1的情况下,向本车辆1的前方进行了车道变更的其他车辆v2减速的可能性低,因此减弱在减速控制中使本车辆1减速的程度。由此,能够根据前行车辆v1的有无而适当地进行使本车辆1减速的减速控制。
42.另外,在由检测单元41~43未识别到前行车辆v1的情况下,也可以将在减速控制中使本车辆1减速的程度设为零,不使本车辆1减速。在不存在前行车辆v1的情况下,认为其他车辆v2加速而以比本车辆1快的行驶速度进行车道变更。因此,不需要使本车辆1减速,通过将使本车辆1减速的程度设为零,能够抑制本车辆1的过度的减速控制。
43.另外,ecu20能够基于其他车辆v2的行为来判定其他车辆v2是否摇晃。例如,在比假想线vl(或者车道l2)远离车道线tl2的位置设定阈值(摇晃的判定基准),在其他车辆v2跨越该阈值而在车宽方向上移动的情况下,能够判定为其他车辆v2摇晃。另外,在规定的时间内,在其他车辆v2跨越上述阈值规定次数以上的情况下,也能够判定为其他车辆v2摇晃。因此,在判定为其他车辆v2摇晃的情况下,与判定为其他车辆v2不摇晃的情况相比,可以变更其他车辆v2的车道变更的判定基准,以使得难以判定为其他车辆v2进行车道变更。具体而言,在判定为其他车辆v2摇晃的情况下,如图4a所示,将其他车辆v2的车道变更的判定基准设为车道线tl2(放缓判定基准),在判定为其他车辆v2不摇晃的情况下,如图4b所示,将其他车辆v2的车道变更的判定基准设为假想线vl(判定基准变严格)。由此,能够抑制将其他车辆v2的摇晃误判定为车道变更,并抑制相对于摇晃的其他车辆v2的过度的减速控制。
44.另外,ecu20可以根据判定为其他车辆v2摇晃的时间来变更其他车辆v2的车道变更的判定基准。例如,在判定为其他车辆v2摇晃的时间长的情况下,与判定为其他车辆v2摇晃的时间短的情况相比,变更其他车辆v2的车道变更的判定基准,以使得难以判定为其他车辆v2进行车道变更。具体而言,在判定为其他车辆v2摇晃的时间长的情况下,如图4a所示,将其他车辆v2的车道变更的判定基准设为车道线tl2(放缓判定基准),在判定为其他车辆v2摇晃的时间短的情况下,如图4b所示,将其他车辆v2的车道变更的判定基准设为假想线vl(判定基准变严格)。这样,在其他车辆v2的摇晃较短的情况(初始)下,难以判定为其他车辆v2进行车道变更,在其他车辆v2的摇晃较长的情况下,容易判定为其他车辆v2不进行车道变更,从而能够抑制本车辆1相对于其他车辆v2的明显摇晃的过度的减速控制。
45.另外,ecu20在判定为其他车辆v2摇晃的时间短的情况下,与判定为其他车辆v2不摇晃的情况相比,变更其他车辆v2的车道变更的判定基准,以使得容易判定为其他车辆v2进行车道变更,在判定为其他车辆v2摇晃的时间长的情况下,与判定为其他车辆v2不摇晃的情况相比,变更其他车辆v2的车道变更的判定基准,以使得难以判定为其他车辆v2进行车道变更。具体而言,如图6所示,若将判定为其他车辆v2不摇晃的情况下的其他车辆v2的车道变更的判定基准设为假想线vl,则在判定为其他车辆v2摇晃的时间短的情况下,将其他车辆v2的车道变更的判定基准设为比假想线vl(或者车道l2)远离车道线tl2的假想线vl1(判定基准变严格),在判定为其他车辆v2摇晃的时间长的情况下,将其他车辆v2的车道变更的判定基准设为车道线tl2(放缓判定基准)。由此,能够抑制本车辆1相对于其他车辆
v2的明显摇晃的过度的减速控制。
46.另外,ecu20也可以根据其他车辆v2摇晃的程度(频率)来变更其他车辆v2的车道变更的判定基准。在此,其他车辆v2摇晃的程度包括其他车辆v2的车宽方向上的移动量的绝对值、其他车辆v2向车宽方向的移动的次数、跨越设定在比假想线vl更远离车道线tl2的位置的阈值时的其他车辆v2的车宽方向上的移动速度等。例如,在其他车辆v2摇晃的程度大于阈值的情况下,变更其他车辆v2的车道变更的判定基准,以使得容易判定为其他车辆v2进行车道变更。具体而言,在其他车辆v2摇晃的程度大于阈值的情况下,如图4a所示,将其他车辆v2的车道变更的判定基准设为车道线tl2(放缓判定基准),在其他车辆v2摇晃的程度为阈值以下的情况下,如图4b所示,将其他车辆v2的车道变更的判定基准设为假想线vl(判定基准变严格)。一般而言,认为其他车辆v2摇晃的程度越大,则其他车辆v2侵入到本车辆1正在行驶的车道的可能性越高,因此需要进行使本车辆1减速的减速控制。因此,其他车辆v2摇晃的程度越大,越容易判定为其他车辆v2进行车道变更,由此能够进行使本车辆1减速的减速控制。此外,在将其他车辆v2向车宽方向的移动的次数设为摇晃的程度的情况下,可以将比上述的摇晃的判定的基准、即在规定的时间内其他车辆v2跨越比假想线vl远离车道线tl2的位置的规定的次数多的次数设定为摇晃的程度的判定的基准(阈值)。
47.<实施方式的总结>
48.1.上述实施方式的控制装置是控制车辆(例如1)的行驶的控制装置(例如2),其特征在于,
49.所述控制装置具有:
50.识别部(例如41、42、43),其识别存在于与本车辆(例如1)的行驶车道(例如l1)相邻的相邻车道(例如l2)的其他车辆(例如v2);
51.判定部(例如20),其基于由所述识别部识别出的所述其他车辆的行为和针对所述行为进行设定的判定基准,判定所述其他车辆是否向所述本车辆的行驶车道进行车道变更;以及
52.控制部(例如20),其根据所述判定部对所述其他车辆是否进行车道变更的判定结果来控制所述本车辆的行驶,
53.所述判定部根据所述本车辆的行进方向上的所述本车辆与所述其他车辆之间的距离(例如dt)来变更所述判定基准。
54.根据该实施方式,能够抑制针对其他车辆的摇晃的误判定(判定为进行车道变更),并根据本车辆与其他车辆之间的距离适当地判定其他车辆的车道变更。
55.2.在上述实施方式的控制装置(例如2)中,其特征在于,
56.所述判定部(例如20)以如下方式变更所述判定基准:在所述距离(例如dt)为规定的距离(例如pdt)以上的情况下,在所述其他车辆(例如v2)的至少一部分跨越划定所述行驶车道(例如l1)的车道线(例如tl1、tl2)中的所述相邻车道侧的车道线(例如tl2)的时刻,判定为所述其他车辆进行车道变更,在所述距离小于所述规定的距离的情况下,在所述其他车辆的至少一部分跨越设定于所述相邻车道内的假想线(例如vl)的时刻,判定为所述其他车辆进行车道变更。
57.根据该实施方式,能够根据本车辆与其他车辆之间的距离适当地判定其他车辆的车道变更。
58.3.在上述实施方式的控制装置(例如2)中,其特征在于,
59.还具有获取所述本车辆(例如1)的行驶速度的获取部(例如7c),
60.所述判定部(例如20)根据由所述获取部获取的所述本车辆的行驶速度来变更所述判定基准,
61.在所述本车辆的行驶速度快的情况下,与所述本车辆的行驶速度慢的情况相比,所述判定部变更所述判定基准以便容易判定为所述其他车辆(例如v2)进行车道变更。
62.根据该实施方式,能够根据本车辆的行驶速度适当地判定其他车辆的车道变更。
63.4.在上述实施方式的控制装置(例如2)中,其特征在于,
64.在由所述判定部(例如20)判定为所述其他车辆(例如v2)进行车道变更的情况下,所述控制部(例如20)进行使所述本车辆(例如1)减速的减速控制。
65.根据该实施方式,能够避免与其他车辆的碰撞。
66.5.在上述实施方式的控制装置(例如2)中,其特征在于,
67.所述识别部(例如41、42、43)识别存在于所述本车辆(例如1)的行驶车道(例如l1)的前方的前行车辆(例如v1),
68.所述控制部(例如20)根据由所述识别部是否识别出所述前行车辆,来变更在所述减速控制中使所述本车辆减速的程度。
69.根据该实施方式,能够根据前行车辆的有无而适当地进行使本车辆减速的减速控制。
70.6.在上述实施方式的控制装置(例如2)中,其特征在于,
71.所述控制部(例如20)在由所述识别部(例如41、42、43)未识别出所述前行车辆(例如v1)的情况下,将在所述减速控制中使所述本车辆(例如1)减速的程度设为零。
72.根据该实施方式,能够抑制本车辆的过度的减速控制。
73.7.在上述实施方式的控制装置(例如2)中,其特征在于,
74.所述判定部(例如20)基于所述其他车辆(例如v2)的行为,判定所述其他车辆是否在车宽方向上摇晃,
75.在判定为所述其他车辆在车宽方向上摇晃的情况下,与判定为所述其他车辆在车宽方向上不摇晃的情况相比,所述判定部变更所述判定基准以便难以判定为所述其他车辆进行车道变更。
76.根据该实施方式,能够抑制本车辆相对于摇晃的其他车辆的过度的减速控制。
77.8.在上述实施方式的控制装置(例如2)中,其特征在于,
78.所述判定部(例如20)根据判定为所述其他车辆(例如v2)在车宽方向上摇晃的时间,变更所述判定基准,
79.在判定为所述其他车辆在车宽方向上摇晃的时间长的情况下,与判定为所述其他车辆在车宽方向上摇晃的时间短的情况相比,所述判定部变更所述判定基准以便难以判定为所述其他车辆进行车道变更。
80.根据该实施方式,能够抑制本车辆相对于其他车辆的明显的摇晃的过度的减速控制。
81.9.在上述实施方式的控制装置(例如2)中,其特征在于,
82.在判定为所述其他车辆(例如,v2)在车宽方向上摇晃的时间短的情况下,与判定
为所述其他车辆在车宽方向上不摇晃的情况相比,所述判定部(例如20)变更所述判定基准以便容易判定为所述其他车辆进行车道变更,
83.在判定为所述其他车辆在车宽方向上摇晃的时间长的情况下,与判定为所述其他车辆在车宽方向上不摇晃的情况相比,所述判定部变更所述判定基准以便难以判定为所述其他车辆进行车道变更。
84.根据该实施方式,能够抑制本车辆相对于其他车辆的明显摇晃的过度的减速控制。
85.10.在上述实施方式的控制装置(例如2)中,其特征在于,
86.在所述其他车辆(例如v2)在车宽方向上摇晃的程度大于阈值的情况下,所述判定部(例如20)变更所述判定基准以便容易判定为所述其他车辆进行车道变更。
87.根据该实施方式,能够相对于摇晃程度大的其他车辆进行使本车辆减速的减速控制。
88.11.上述实施方式的车辆(例如1)的特征在于,
89.所述车辆具有:
90.识别部(例如41、42、43),其识别存在于与本车辆(例如1)的行驶车道(例如l1)相邻的相邻车道(例如l2)的其他车辆(例如v2);
91.判定部(例如20),其基于由所述识别部识别出的所述其他车辆的行为和针对所述行为进行设定的判定基准,判定所述其他车辆是否向所述本车辆的行驶车道进行车道变更;以及
92.控制部(例如20),其根据所述判定部对所述其他车辆是否进行车道变更的判定结果来控制所述本车辆的行驶,
93.所述判定部根据所述本车辆的行进方向上的所述本车辆与所述其他车辆之间的距离(例如dt)来变更所述判定基准。
94.根据该实施方式,能够抑制针对其他车辆的摇晃的误判定(判定为进行车道变更),并根据本车辆与其他车辆之间的距离适当地判定其他车辆的车道变更。
95.本发明并不限定于上述的实施方式,能够在发明的主旨的范围内进行各种变形、变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1