基于车前地形的主动悬挂惯性调控方法和控制系统
1.本发明涉及车辆悬挂领域,尤其是一种基于车前地形的主动悬挂控制方法和控制系统。
背景技术:
2.悬挂系统是车辆底盘的重要组成部分,其性能直接决定着车辆的行驶平顺性和操纵稳定性。传统的车辆大多采用被动悬挂,其悬挂参数根据特定路面条件进行设计,一经选定便难以改变,不能随路面状况、车速等发生变化,因此限制了汽车行驶性能的进一步提高。
3.主动悬挂是近十几年来发展起来的由电脑控制的一种悬挂方式,主动悬挂可以根据车载质量、路面状况(如颠簸振动情况)、运行工况(如车速、驱/制动、转向)等的变化,自动调整悬挂的刚度与阻尼或悬挂伸缩,以满足汽车行驶平顺性和操纵稳定性等方面的要求。
4.主动悬挂技术主要包含主动悬挂控制方法和系统两部分。主动悬挂系统包括提供能量的装置和可控制作用力或位移的附加装置。根据能源提供的方式不同又分为液压驱动、气压驱动和电驱动三种,液压驱动悬挂系统因功率密度较高,便于布置安装等优点目前应用较多,气压驱动悬挂系统因为驱动柔和、污染少等优势也得到了一定的应用。即使相同的主动悬挂系统由于采用不同的控制方法,也会产生不同的控制效果。目前的主动悬挂的控制方法主要包括:天棚阻尼控制、最优控制、预瞄控制、自适应控制、模糊控制、神经网络控制、滑模控制、免疫进化控制等。根据文献记载,无论采用何种控制方法,车辆的性能均有不同程度的改善,但也存在一些问题没有得到较好地解决,特别是车辆的姿态调节和行驶平顺性控制是悬挂设计需考虑的两个重要方面,现有研究成果大多是根据不同的需要建立不同的数学模型,各自独立进行设计,并认为车辆的总体性能是二者性能之和;或者对数学模型进行分解,然后再组合起来进行控制。在建立数学模型时没有考虑把姿态控制和行驶平顺性控制同时进行设计,设计过程比较复杂且难以获得较好的控制效果。
技术实现要素:
5.为了解决前述问题,我们提出了一种新的主动悬挂控制理论——悬挂惯性调控原理。它是基于仿生原理提出的,猎豹之所以能以120km/h的速度在凹凸不平的野外奔跑,主要是因为它可以根据前方地形调节各爪的支撑高度和支撑力,使质心沿一个平滑的曲线运动,且可以保持姿态的相对稳定。基于此原理,本发明提出的基于车前地形的主动悬挂惯性调控方法是,通过激光雷达扫描车前地形,根据车前地形的高程信息和行车参数自主控制各组悬挂的伸缩,使车辆在凹凸不平路面行驶时其质心沿一条相对比较平滑的曲线运动,且车体姿态尽可能地保持平稳变化,从而大幅度降低车辆行驶时车体的颠簸振动,提高车辆在不平路面行驶的速度、行驶平顺性和操纵稳定性。
6.为了实现上述控制目标,规划出比原被动悬挂车辆行驶时更加平滑的运动轨迹,
是本发明要解决的主要问题。实践证明,车辆轨迹的规划不应该是基于几何学的,因几何学所规划的轨迹一般不符合车辆运动学与动力学规律,即由几何学规划出来的车辆轨迹上的各时点的位姿,实际车辆不一定能够实现。所以合理的轨迹规划首先应该符合运动学与动力学规律,其次应该保证轨迹上的各点所对应的所有悬挂行程均应位于极限行程之内。
7.实际车辆以被动悬挂越过不平路面时,从起点驶向终点的轨迹是一种现实的存在,它无疑具有合理性,即车辆按照这样的轨迹运动不但符合运动学与动力学规律,而且从起点驶向终点各悬挂的行程也一定在其极限行程范围内。更重要的是,车辆以不同性能的悬挂驶过相同的路程时,其轨迹也会有所变化,且各悬挂的行程都在其极限行程范围内。即车辆从起点驶向终点其轨迹可有一定的变化范围,这就为本发明进行主动悬挂车辆的轨迹规划提供了理论依据。
8.本发明提出的车辆轨迹规划思路是,假设车辆可选择使用被动悬挂或主动悬挂,以被动悬挂驶过不平路面的车辆轨迹作为基础,对其进行平滑处理,使车辆以主动悬挂按平滑后的新轨迹行驶,其各时点悬挂的行程如果能控制在极限行程范围之内,那么这样的主动悬挂控制方法就可以使车辆的行驶平顺性和操控稳定性得到提高。在满足悬挂行程不超过极限行程的条件下,车辆轨迹越平滑,行驶平顺性和操控稳定性就会越好。
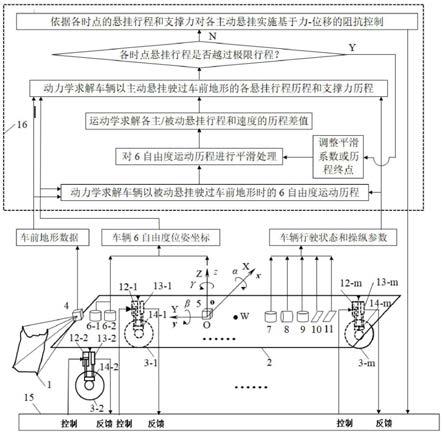
9.基于以上思路,本发明的第一方面是提供一种基于车前地形的主动悬挂惯性调控方法,其包括:
10.s1:计算车辆驶过车前地形的车轮接地点轨迹和各车轮接地点高程信息。
11.根据惯性测量单元、双天线gps定位系统测得的车辆在大地坐标系下的位置坐标、激光雷达扫描得到的车前地形和各车轮转向角,由车辆运动学计算出车辆在车前地形上行驶时各个车轮接地点的轨迹t1、t2、
…
、t
m
,j=1、2、
…
、m,m为车轮的个数。通过插值算法计算出各车轮接地点轨迹上各规划数据点的高程信息。
12.s2:计算车辆以被动悬挂驶过车前地形的质心轨迹与姿态历程。
13.s21:根据车速、转向角、各车轮驱/制动力和车轮在地面的滚动摩擦系数,由车辆的动力学模型计算出车辆以被动悬挂沿步骤s1中车轮接地点轨迹t1、t2、
…
、t
m
行驶时车辆坐标系的6维坐标历程{x
i
y
i
z
i
α
i
β
i
γ
i
}
t
。和车辆的质心轨迹和姿态历程{x
wi
y
wi
z
wi
α
wi
β
wi
γ
wi
}
t
,其中:x
wi
、y
wi
、z
wi
、α
wi
、β
wi
、γ
wi
分别为车辆质心处的三维坐标和三维姿态角,i=0、1、2、
…
、n,n为规划数据点的个数。
14.s22:取平滑系数为ξ,对步骤s21中的被动悬挂车辆质心轨迹和姿态历程进行过起点的平滑处理,得到质心轨迹和姿态历程的平滑函数{x
w
(t
i
)、y
w
(t
i
)、z
w
(t
i
)、α
w
(t
i
)、β
w
(t
i
)、γ
w
(t
i
)}
t
。
15.s3:基于前述平滑处理后的质心轨迹与姿态历程,计算车辆以主动悬挂驶过车前地形的悬挂行程历程s
i,j
和悬挂支撑力历程w
ij
。
16.s31:将步骤s22中平滑后的车辆质心轨迹和姿态历程作为输入,计算车辆以主动悬挂驶过车前地形时各悬挂相对于被动悬挂的行程历程和速度历程其中j=1、2、
…
、m,m为车轮数。
17.s32:在与步骤s21相同的车速、转向角、各车轮驱/制动力、地面滚动摩擦系数情况下,依照步骤s31中获得的主动悬挂相对于被动悬挂行程历程和速度历程由动力学
模型计算车辆以主动悬挂驶过车前地形的各悬挂相对于中位的行程历程s
i,j
支撑力历程w
ij
。
18.s4:依据车辆以主动悬挂驶过车前地形时悬挂相对中位的行程历程s
i,j
和悬挂支撑力历程w
ij
,对悬挂作动器实施基于力
‑
位移的阻抗控制。
19.优选的,所述s21、s32中具体的车辆动力学模型及其解法如下:
20.如图2所示,建立固定坐标系oxyz,它与地面固连,该坐标系以惯性测量单元基准点o为坐标原点,以车辆的正前方为y轴正方向,以车辆的右侧方向为x轴正方向,以垂直xoy平面向上的方向为z轴正方向;为确定车辆在固定坐标系中的位置,再引入车辆坐标系oxyz,它与车体固连。车辆坐标系与固定坐标系在初始位置重合,其在固定坐标系中的定位坐标分别为x、y、z、α、β、γ。
21.为提高计算速度,将车辆看作刚体,设其质量为m,它在车辆坐标系中的坐标为w(x
w
,y
w
,z
w
)。车辆具有m个车轮,对应有m个悬挂。将主动悬挂简化为作动器、弹簧和阻尼器的并联。设对主动悬挂的控制方法为位移控制;各悬挂弹簧的刚度系数分别为k
s1
、k
s2
、
…
、k
sm
,各悬挂阻尼器的阻尼系数分别为c
s1
、c
s2
、
…
、c
sm
。将轮胎简化为垂向弹簧与阻尼的并联,忽略轮胎侧向与切向弹性和阻尼对车辆动力学特性的影响。设各轮胎垂向弹簧的刚度系数分别为k
w1
、k
w2
、
…
、k
wm
,各轮胎垂向阻尼的阻尼系数分别为c
w1
、c
w2
、
…
、c
wm
。设前述阻尼均为粘性阻尼;前述弹簧均设为非线性弹簧,并以分段线性近似。
22.以上所建的是主动悬挂车辆的动力学模型,它具有6个自由度。若去掉各悬挂中的作动器,则前述动力学模型就变为被动悬挂车辆的动力学模型。值得一提的是,部分主动悬挂设计时不设悬挂弹簧和阻尼器,此种情况应将上述主动悬挂车辆动力学模型中的悬挂弹簧和阻尼器略去。
23.通过拉格郎日方程建立该车辆动力学模型的运动微分方程,用矩阵表示如下:
[0024][0025]
式中:[m6×6]、[c6×6]、[k6×6]分别为质量阵、阻尼阵和刚度阵,均为6
×
6的对称方阵;{f6}为力矩阵,为6
×
1的列阵。
[0026]
取车辆在固定坐标系的位移向量为:
[0027]
{q6}={x、y、z、α、β、γ}
t
[0028]
基于上面的运动微分方程构建动力学矩阵如下:
[0029][0030]
设状态变量为:
[0031][0032]
代入动力学矩阵得状态方程式如下:
[0033][0034]
其中:
[0035][0036]
上面的状态方程式可通过四阶龙格库塔法求解,得出状态变量{q
12
}的值。
[0037]
优选的,所述s21计算车辆以被动悬挂驶过车前地形的质心轨迹和姿态历程的具体方法为:
[0038]
由动力学模型求得的车辆以被动悬挂驶过车前地形的各时点{q
12
}
i
,求得车辆轨迹历程中的与悬挂特性相关的三个坐标为:
[0039][0040]
上式是假设α、β是微小变量,取cosα≈1,cosβ≈1,sinα≈α,sinβ≈β,并忽略了车身的变形得出的。
[0041]
优选的,所述s31中,计算车辆以主动悬挂驶过车前地形的各悬挂相对于被动悬挂的行程历程和速度历程的具体步骤如下:
[0042]
①
基于s21中求得的车辆以被动悬挂驶过车前地形的车辆坐标系6维坐标历程{x
i
y
i
z
i
α
i
β
i
γ
i
}
t
,由下式求出各悬挂上支撑点q1、q2、
…
、q
m
的垂向位移历程为:
[0043][0044]
式中:b
j
——编号为j的悬挂上支撑点在oxyz坐标系中的x坐标;
[0045]
l
j
——编号为j的悬挂上支撑点在oxyz坐标系中的y坐标。
[0046]
则各悬挂上支撑点q1、q2、
…
、q
m
的垂向速度历程为:
[0047][0048]
②
根据s22中平滑处理后得到的质心轨迹和姿态历程的函数{x
w
(t
i
)、y
w
(t
i
)、z
w
(t
i
)、α
w
(t
i
)、β
w
(t
i
)、γ
w
(t
i
)}
t
,反求出车辆坐标系相对固定坐标系三个相关坐标的时间历程函数为:
[0049][0050]
再由z(t
i
)、α(t
i
)、β(t
i
)求出各悬挂上支撑点q1、q2、
…
、q
m
的垂向位移为:
[0051][0052]
各悬挂上支撑点q1、q2、
…
、q
m
的垂向速度为:
[0053][0054]
③
求各主动悬挂相对于被动悬挂的行程历程和速度历程
[0055]
各主动悬挂相对于被动悬挂的行程历程等于平滑处理后各主动悬挂上支撑点的
垂向位移历程w
i,j
与平滑处理前被动悬挂上支撑点的垂向位移历程之差:
[0056][0057]
各主动悬挂相对于被动悬挂的速度历程等于平滑处理后各主动悬挂上支撑点的垂向速度历程与平滑处理前被动悬挂上支撑点的垂向速度历程之差:
[0058][0059]
优选的,步骤s32中由车辆动力学模型计算以主动悬挂驶过车前地形的车辆各悬挂行程历程s
i,j
和支撑力历程w
ij
的具体步如下:
[0060]
①
求各主动悬挂上支撑点的垂向位移历程w
′
i,j
和垂向速度历程
[0061]
根据主动/被动悬挂行程差历程和速度差历程由车辆动力学模型求解得到主动悬挂车辆驶过车前地形的新状态变量{q
′
12
}
i
,将其中所包括的位移变量z
′
i
,α
′
i
,β
′
i
,代入下式求出各悬挂上支撑点q1、q2、
…
、q
m
的垂向位移历程:
[0062]
w
′
i,j
=z
′
i
‑
b
j
β
′
i
+l
j
α
′
i
,i=0、1、2、
…
、n;j=1、2、
…
、m
[0063]
将其中的速度变量值,代入下式求出各悬挂上支撑点q1、q2、
…
、q
m
的垂向速度历程为:
[0064][0065]
②
求各主动悬挂相对于中位的行程历程s
i,j
[0066]
因轮胎的垂向变形远小于主动悬挂的行程,这里暂且略去轮胎的垂向变形,轮胎的垂向变形将在s4中的悬挂阻抗控制中得到补偿。则各主动悬挂相对于中位的行程历程等于各主动悬挂上支撑点q1、q2、
…
、q
m
的垂向位移历程w
i
′
,j
与各车轮接地点r1、r2、
…
、r
m
的垂向位移历程
△
i,j
之差。
[0067]
s
i,j
=w
i
′
,j
‑△
i,j
,i=0、1、2、
…
、n;j=1、2、
…
、m
[0068]
③
求各主动悬挂的支撑力历程w
i,j
[0069]
车辆各主动悬挂的支撑力历程为:
[0070][0071]
式中,
△
i,j
与分别为车轮接地点r1、r2、
…
、r
m
的垂向位移历程与速度历程。
[0072]
优选的,所述s4对悬挂作动器实施基于力
‑
位移的阻抗控制的具体实现方法如下:
[0073]
①
求解悬挂阻抗控制的位移控制量
[0074]
设当前悬挂支撑力实测值为用下式来表达悬挂的理论支撑力和实际支撑力之差与期望悬挂行程增量δ
i,j
之间的关系:
[0075][0076]
式中,m、k和c分别为目标惯性、目标刚度与目标阻尼,分别反映了簧下质量的惯性特性、轮胎接地的刚度特性和阻尼特性。上面的微分方程可用卷积积分方式求解:
[0077][0078]
上式中的函数h
i,j
(t)是前式所对应单位脉冲响应函数。
[0079]
上式可由fft算法求解。实际控制时,由于车辆各悬挂行程增量δ
i,j
的运动速度和加速度均比较小,可认为故车轮与地面的接触力模型可简化为:
[0080][0081]
②
主动悬挂基于力
‑
位移的阻抗控制
[0082]
设悬挂相对中位行程的实测值为以为目标行程,设计自抗扰控制器,实现对各悬挂作动器的位移随动控制。
[0083]
优选的,所述s4还包括基于力
‑
位移的阻抗控制实施之前用于校验全历程内悬挂行程是否存在越过极限行程的内容。
[0084]
校验式为:
[0085][0086]
式中:s
min
——悬挂的下极限位移;
[0087]
s
max
——悬挂的上极限位移。
[0088]
若存在某个悬挂行程超过极限行程,则首先降低对车辆轨迹曲线的平滑度,调整相应的平滑系数ξ,分以下两种情况分别进行处理:
[0089]
①
若平滑系数ξ尚未达到预设的平滑系数极限值,则转到步骤s22。
[0090]
②
若平滑系数ξ已达平滑系数极限值,仍然不能满足全历程内各悬挂行程不超过极限行程的条件,按照出现的时间顺序找到悬挂行程超过极限行程的第一个数据点,设其在步骤s2中规划数据点的编号为i
e
(1≤i
e
≤n),则令n=i
e
,并返回步骤s21。
[0091]
通过以上处理可使全历程内各悬挂行程均不超过极限行程。
[0092]
本发明的第二方面是提供一种根据前述的基于车前地形的主动悬挂惯性调控方法的控制系统,如图1所示,系统包括车体及m个车轮、激光雷达、惯性测量单元、双天线gps定位系统、与车轮相对应的悬挂缸及其位移传感器、支撑力传感器和伺服控制器组、车速传感器、方向盘转角传感器、油门开度传感器、制动力传感器、电控单元;其中,激光雷达、惯性测量单元、双天线gps定位系统、电控单元以及伺服控制器组固定于车体上,且激光雷达装于车体的前部用于测量车前地形,双天线gps定位系统的两个天线在空间上隔开一定的距离;所述车轮通过悬挂缸连接于车体下方,位移传感器与支撑力传感器安装于悬挂缸上用于测量悬挂缸的行程和支撑力;方向盘转角传感器、油门开度传感器、制动力传感器用于测量转向角和油门开度与制动强度;所述电控单元分别与惯性测量单元、激光雷达、双天线gps定位系统、方向盘转角传感器、油门开度传感器、制动力传感器、以及伺服控制器组通讯连接,伺服控制器组与悬挂缸的位移传感器和支撑力传感器通讯连接。
[0093]
由于采用了上述技术方案,本发明取得的技术进步是:
[0094]
与现有主动悬挂技术相比,本发明的优势在于,能够将姿态调节控制和行驶平顺性控制统一起来,从而使悬挂性能得到大幅度提高。传统的主动悬挂控制主要是根据车辆
的行驶工况对悬挂的刚度与阻尼或悬挂行程进行控制,而不是对车辆位姿进行控制,所以存在行驶时车辆位姿不可控的因素,影响到行驶平顺性、操控稳定性和行驶安全性,特别是在地面凹凸不平和松软程度变化较大的情况下陡增了失控的风险。本发明提出的基于车前地形的主动悬挂惯性调控方法和控制系统,通过控制各组悬挂的伸缩来控制车辆行驶的位姿;通过对悬挂进行力
‑
位移阻抗控制,克服地面软硬程度变化带来的扰动影响,使车辆的质心沿预定的平滑曲线运动且姿态保持基本稳定,从而大幅度提高车辆在非结构化路面行驶的行车速度、行驶平顺性和操纵稳定性。
附图说明
[0095]
图1是基于车前地形的主动悬挂惯性调控系统结构原理图;
[0096]
图2是多轴主动悬挂车辆在不平斜坡行驶的动力学模型;
[0097]
图3是针对悬挂实施的基于力
‑
位移的阻抗控制原理图;
[0098]
图4是基于车前地形的三轴车辆主动悬挂惯性调控系统结构原理图;
[0099]
图5是三轴主动悬挂车辆在不平斜坡行驶的动力学模型。
具体实施方式
[0100]
下面结合实施例对本发明做进一步详细说明:
[0101]
1.基于车前地形的主动悬挂惯性调控系统
[0102]
如图1所示,系统包括车前地形1,车体2以及m个车轮3
‑
1、3
‑
2、
…
、3
‑
m,激光雷达4,惯性测量单元5,双天线gps定位系统6
‑
1、6
‑
2,车速传感器7,挡位传感器8,方向盘转角传感器9、油门开度传感器10、及制动力传感器11,与车轮相对应的悬挂缸12
‑
1、12
‑
2、
…
、12
‑
m及其位移传感器13
‑
1、13
‑
2、
…
、13
‑
m和支撑力传感器14
‑
1、14
‑
2、
…
、14
‑
m,伺服控制器组15、电控单元16等。其中,激光雷达4、惯性测量单元5、双天线gps定位系统的两个天线6
‑
1、6
‑
2、电控单元16以及伺服控制器组15固定于车体2上,且激光雷达4装于车体2的前部用于测量车前地形1,双天线gps定位系统的两个天线6
‑
1、6
‑
2在空间上隔开一定的距离;所述车轮3
‑
1、3
‑
2、
…
、3
‑
m通过悬挂缸12
‑
1、12
‑
2、
…
、12
‑
m连接于车体2下方,安装于悬挂缸12
‑
1、12
‑
2、
…
、12
‑
m上的位移传感器13
‑
1、13
‑
2、
…
、13
‑
m和支撑力传感器14
‑
1、14
‑
2、
…
、14
‑
4分别用于测量其行程和支撑力。所述电控单元16分别与激光雷达4、惯性测量单元5、双天线gps定位系统的两个天线6
‑
1、6
‑
2,车速传感器7,挡位传感器8,方向盘转角传感器9、油门开度传感器10及制动力传感器11,以及伺服控制器组15通讯连接,伺服控制器组15与悬挂缸的位移传感器13
‑
1、13
‑
2、
…
、13
‑
m和支撑力传感器14
‑
1、14
‑
2、
…
、14
‑
m通讯连接。
[0103]
基于车前地形的车辆主动悬挂惯性调控方法分为以下几个步骤。
[0104]
s1:计算车辆驶过车前地形的车轮接地点轨迹和各车轮接地点高程信息
[0105]
基于惯性测量单元5和双天线gps定位系统两个天线6
‑
1、6
‑
2测得的车辆在大地坐标系下的位置坐标,激光雷达4扫描获得的车前地形1和方向盘转角传感器测算出的各车轮转向角θ1、θ2、
…
、θ
m
,由车辆运动学计算出车辆在车前地形1上行驶时车轮3
‑
1、3
‑
2、
…
、3
‑
m接地点的轨迹t1、t2、
…
、t
m
,m为车轮数。进一步通过插值算法计算出车轮接地点轨迹上各规划数据点的高程信息。
[0106]
s2:计算车辆以被动悬挂驶过车前地形的质心轨迹与姿态历程
[0107]
s21:计算车辆以被动悬挂驶过车前地形的质心轨迹与姿态历程
[0108]
根据地面地质条件决定的滚动摩擦系数,车速传感器7测得的车速、方向盘转角传感器9测得的转向角,挡位传感器8和油门开度传感器10测得的各车轮驱力,制动力传感器11测得的制动力,由被动悬挂车辆动力学模型计算出车辆以被动悬挂沿步骤s1中规划出的车轮接地点轨迹t1、t2、
…
、t
m
行驶时车辆坐标系的6维坐标历程{x
i
y
i
z
i
α
i
β
i
γ
i
}
t
,和车辆的质心轨迹和姿态历程{x
wi
y
wi
z
wi
α
wi
β
wi
γ
wi
}
t
,其中:x
wi
、y
wi
、z
wi
、α
wi
、β
wi
、γ
wi
分别为车辆质心处的三维坐标和三维姿态角,在时间顺序上分别对应于悬挂控制的各扫描周期节点t
i
=iδτ,i=0、1、2、
…
、n,δτ为扫描周期,n为规划数据点的个数。
[0109]
在被动悬挂车辆的动力学模型中,由悬挂的弹簧和阻尼、轮胎的弹簧和阻尼串联而成的各被动悬挂支链的综合刚度系数和综合阻尼系数可用下式计算:
[0110][0111]
s22:对步骤s21中的车辆质心的轨迹和姿态历程进行平滑处理
[0112]
取平滑系数为ξ,对步骤s21中的被动悬挂车辆在车前地形行驶的质心轨迹和姿态历程进行平滑处理。为提高处理速度,此种平滑处理不是对6自由度空间曲面进行的平滑处理,而是对6个自由度坐标独立进行的平滑处理。常用的平滑处理方法较多,但适用于本发明的平滑处理方法要求平滑后的曲线必须过数据起点,否则会引起车辆不必要的振动。经过平滑处理后得到的质心轨迹和姿态历程为{xw(t
i
),yw(t
i
),zw(t
i
),αw(t
i
),βw(t
i
),γw(t
i
)}
t
,i=0、1、2、
…
、n,其中各分量相互独立,都是时间的函数。
[0113]
s3:基于平滑处理后的质心轨迹与姿态历程,计算车辆以主动悬挂驶过车前地形的各悬挂的行程历程s
ij
和悬挂支撑力历程w
ij
。
[0114]
s31:将步骤s22中平滑后的车辆质心轨迹和姿态历程作为输入,计算车辆以主动悬挂驶过车前地形时各悬挂相对于被动悬挂的行程历程和速度历程其中j=1、2、
…
、m,m为车轮数。
[0115]
s32:在与步骤s21相同的车速、转向角、各车轮驱/制动力、地面滚动摩擦系数情况下,依照步骤s31中获得的主动悬挂相对于被动悬挂的行程历程和速度历程由主动悬挂车辆动力学模型计算车辆驶过车前地形的各悬挂相对中位的行程历程s
ij
和支撑力历程w
ij
,其中i=0、1、2、
…
、n,j=1、2、
…
、m。
[0116]
因主动悬挂的作动器采用的是位移控制,所以在进行主动悬挂动力学计算时,可以忽略与作动器并联的悬挂弹簧和悬挂阻尼的影响,而取每个主动悬挂支链的综合刚度系数和综合阻尼系数分别为
[0117]
s4:对主动悬挂车辆实施基于力
‑
位移的阻抗控制
[0118]
如图3所示,s
ij
是基于步骤s31计算出来的主动悬挂行程,w
ij
是基于步骤s32计算出来的各悬挂支撑力;与其相对应,是通过位移传感器13
‑
1、13
‑
2、
…
、13
‑
m测得的实际各悬挂的行程,是通过支撑力传感器14
‑
1、14
‑
2、
…
、14
‑
m测得的实际各悬挂的支撑力。通过比较各悬挂支撑力的理论值w
ij
与实测值基于阻抗模型可以求得车辆各悬挂的行
程增量δ
i,j
,从而得到校正后的各悬挂理论行程再与实测得到的各悬挂行程对比,根据其差值最后实施对悬挂的位移控制。
[0119]
下面以三轴车辆为例,参考附图4详细说明本发明的示例性实施例、特征和方法。其它三轮及以上车辆可依据与此例相同的方法来构建。
[0120]
(一)系统硬件构成
[0121]
基于车前地形的三轴车辆主动悬挂惯性调控系统如图4所示,系统包括车前地形1,车体2以及6个车轮3
‑
1、3
‑
2、
…
、3
‑
6,激光雷达4,惯性测量单元5,双天线gps定位系统的两个天线6
‑
1、6
‑
2,车速传感器7,挡位传感器8,方向盘转角传感器9,油门开度传感器10,及制动力传感器11,与车轮3
‑
1、3
‑
2、
…
、3
‑
6相对应的悬挂缸12
‑
1、12
‑
2、
…
、12
‑
6及其位移传感器13
‑
1、13
‑
2、
…
、13
‑
6和支撑力传感器14
‑
1、14
‑
2、
…
、14
‑
6,伺服控制器组15,电控单元16等。其中,激光雷达4、惯性测量单元5、双天线gps定位系统的两个天线6
‑
1、6
‑
2、电控单元16以及伺服控制器组15固定于车体2上,且激光雷达4装于车体2的前部用于测量车前地形1,双天线gps定位系统的两个天线6
‑
1、6
‑
2在空间上隔开一定的距离;所述车轮3
‑
1、3
‑
2、
…
、3
‑
6通过悬挂缸12
‑
1、12
‑
2、
…
、12
‑
6连接于车体2下方,安装于悬挂缸12
‑
1、12
‑
2、
…
、12
‑
6上的位移传感器13
‑
1、13
‑
2、
…
、13
‑
6和支撑力传感器14
‑
1、14
‑
2、
…
、14
‑
6分别用于测量悬挂缸的行程和支撑力。所述电控单元16分别与激光雷达4,惯性测量单元5,双天线gps定位系统的两个天线6
‑
1、6
‑
2,车速传感器7,挡位传感器8,方向盘转角传感器9,油门开度传感器10,制动力传感器11,以及伺服控制器组15通讯连接。伺服控制器组15与悬挂缸的位移传感器13
‑
1、13
‑
2、
…
、13
‑
6和支撑力传感器14
‑
1、14
‑
2、
…
、14
‑
6通讯连接。
[0122]
(二)三轴车辆的动力学模型及解法示例
[0123]
1.三轴主动悬挂车辆在不平斜坡行驶的动力学模型
[0124]
如图5所示,建立固定坐标系oxyz,它与地面固连,该坐标系以惯性测量单元基准点o为坐标原点,以车辆的右侧方向为x轴正方向,以车辆的正前方为y轴正方向,以垂直xoy平面向上的方向为z轴正方向;为确定车辆在固定坐标系中的位置,再引入车辆坐标系oxyz,它与车体固连。车辆坐标系与固定坐标系在初始位置重合,其在固定坐标系中的定位坐标分别为x、y、z、α、β、γ。
[0125]
为提高计算速度,将车辆看作刚体,设其质量为m,它在车辆坐标系中的坐标为w(x
w
,y
w
,z
w
)。三轴车辆具有6个车轮,对应有6个悬挂。将主动悬挂简化为作动器、弹簧和阻尼器的并联。设对主动悬挂的控制方法为位移控制;各悬挂弹簧的刚度系数分别为k
s1
、k
s2
、
…
、k
s6
,各悬挂阻尼器的阻尼系数分别为c
s1
、c
s2
、
…
、c
s6
。将轮胎简化为垂向弹簧与阻尼的并联,忽略轮胎侧向与切向弹性和阻尼对车辆动力学特性的影响。设各轮胎垂向弹簧的刚度系数分别为k
w1
、k
w2
、
…
、k
w6
,各轮胎垂向阻尼的阻尼系数分别为c
w1
、c
w2
、
…
、c
w6
。设前述阻尼均为粘性阻尼;前述弹簧均设为非线性弹簧,并以分段线性近似。
[0126]
以上所建的主动悬挂车辆的动力学模型,具有6个自由度。若略去各悬挂中的作动器,则前述动力学模型就变为被动悬挂车辆的动力学模型,此时各被动悬挂支链的综合刚度系数和综合阻尼系数为:
[0127]
[0128]
本实例在设计主动悬挂的行程中位时,将其与被动悬挂的平衡位置相对应,这样主动悬挂静止于中位时其作动器的理论支撑力应为零,可最大限度地降低车辆因使用主动悬挂而消耗的能量,同时在主/被动悬挂切换时也可产生较小的冲击。因悬挂作动器采用的是位移控制,本实例中将主动悬挂车辆动力学模型中与作动器并联的悬挂弹簧和阻尼器的作用略去,从而各主动悬挂支链的综合刚度系数和综合阻尼系数为:
[0129][0130]
因悬挂支链弹簧具有较强的非线性,本实例中以分段线性近似,又因各支链可能处于不同的线性段,所以用k
z1
,
…
,k
z6
和c
z1
,
…
,c
z6
分别表示各支链垂向的刚度与阻尼。用δ1(t)、δ2(t)、
…
,δ6(t)和(t)和分别表示路面不平度引起的各车轮接地点r1、r2、
…
、r6的垂向位移和速度。当某车轮离地时与其相应的悬挂支链的弹性和阻尼均应置零。
[0131]
因每个扫描周期内α、β是微小变量,则有cosα≈1,cosβ≈1;sinα≈α,sinβ≈β。则车辆质心在固定坐标系oxyz中的坐标计算公式为:
[0132][0133]
式中:x
w
、y
w
、z
w
——车辆质心在车辆坐标系oxyz中的坐标。
[0134]
通过动力学模型和拉格郎日方程建立主动悬挂车辆的运动微分方程,用矩阵表示如下:
[0135][0136]
式中:[m6×6]、[c6×6]、[k6×6]分别为质量阵、阻尼阵和刚度阵,均为6
×
6的对称方阵;{f6}为力矩阵,为6
×
1的列阵;{q6}为需要求解的车辆坐标列向量,为6
×
1的列阵。其中:
[0137][0138]
式中:j
xx
、j
yy
、j
zz
——车辆绕x、y、z轴的惯性矩;
[0139]
j
xy
、j
yz
、j
xz
——车辆对x/y、y/z、x/z轴的惯性积。
[0140]
[0141]
式中:k
zj
——第j个悬挂支链的垂向综合刚度系数;
[0142]
b
j
——编号为j的悬挂上支撑点q
j
在oxyz坐标系中的x坐标;
[0143]
l
j
——编号为j的悬挂上支撑点q
j
在oxyz坐标系中的y坐标。
[0144][0145]
式中:c
zj
——第j个悬挂的垂向综合阻尼系数。
[0146][0147]
式中:r——车轮自由半径;
[0148]
λ——车前地形的坡度角;
[0149]
φ——车辆相对斜坡的方位角,即车辆坐标系的x轴与坡度梯度下降方向的夹角;
[0150]
s0——水平面内被动悬挂车辆从自由状态到重力平衡状态的质心垂向位移量;
[0151]
△
j
——路面不平度引起的各轮接地点垂向位移;
[0152]
——路面不平度引起的各轮接地点垂向速度;
[0153]
——作动器位移闭环控制时主动悬挂相对被动悬挂的输出行程,被动悬挂时此量为0;
[0154]
——作动器位移闭环控制时主动悬挂相对被动悬挂的输出速度,被动悬挂时此量为0;
[0155]
p
j
——第j个车轮的驱动力;
[0156]
f
j
——第j个车轮的制动力;
[0157]
θ
j
——第j个车轮的转向角;
[0158]
g——重力加速度。
[0159]
2.动力学解法
[0160]
取车辆坐标系在oxyz坐标系的位移向量为:
[0161]
{q6}={x、y、z、α、β、γ}
t
[0162]
基于上面的运动微分方程构建动力学矩阵如下:
[0163][0164]
设状态变量为:
[0165][0166]
代入动力学矩阵得状态方程式如下:
[0167][0168]
其中:
[0169][0170][0171]
上面的状态方程式可通过四阶龙格库塔法求解,得出状态变量{q
12
}的值。
[0172]
(三)基于车前地形的三轴车辆主动悬挂惯性调控方法分为以下几个步骤。
[0173]
s1:计算车轮接地点轨迹和各接地点高程信息
[0174]
基于惯性测量单元5和双天线gps定位系统的两个天线6
‑
1、6
‑
2测得的车辆坐标系oxyz在固定坐标系oxyz中的位置坐标{x,y,z,α,β,γ}
t
,激光雷达4扫描并经坐标变换后获得的固定坐标系oxyz下三维网格车前地形1,和基于方向盘转角传感器9测得的车辆转向角及根据阿克曼转向原理计算得到的各车轮转向角θ1、θ2、
…
、θ6,由运动学模型计算出车辆在车前地形1上行驶时各车轮3
‑
1、3
‑
2、
…
、3
‑
6的接地点轨迹t1、t2、
…
、t6,因斜坡的不平,6条轮迹在空间上全部是曲线。在此基础上,通过插值算法可以计算出每个扫描周期的各车轮接地点r1、r2、
…
、r6的高程信息。
[0175]
s2:计算车辆以被动悬挂驶过车前地形的质心轨迹与姿态历程
[0176]
s21:由地面的地质条件确定的车轮地面滚动摩擦系数f,车速传感器7测得的车速v,方向盘转角传感器9测得的转向角θ和根据阿克曼原理计算得到的各车轮转向角θ1、θ2、
…
、θ6,挡位传感器8和油门开度传感器10测得的各轮驱动力p1、p2、
…
、p6,制动力传感器11测得制动力与车轮滚动摩擦力的合力f1、f2、
…
、f6作为输入,由被动悬挂车辆动力学模型求得车辆按照s1中的车轮接地点轨迹t1、t2、
…
、t6行驶的轨迹离散点
[0177]
为规划数据点的个数。基于{q
12
}
i
,求得车辆质心轨迹历程中与悬挂特性相关的三个坐标为:
[0178][0179]
s22:对车辆的行驶轨迹进行平滑处理
[0180]
对前述被动悬挂车辆质心轨迹和姿态历程中的z
wi
、α
wi
、β
wi
三个变量进行过起点的平滑处理。本实施例的平滑处理方法使用最小二乘多项式拟合。以对z
wi
的平滑处理方法为例,具体算法如下。
[0181]
对于给定的数据点(t
i
,z
wi
),t
i
=i
×
δτ,i=0、1、2、
…
、n,δτ为悬挂控制的扫描周期。可用下面的ξ阶多项式进行拟合,其中ξ为多项式阶数,可由小到大逐渐增加,初值可取1。
[0182][0183]
式中:k——多项式幂次;
[0184]
a
k
——多项式系数;
[0185]
ξ——多项式阶数。
[0186]
以此函数来反映相应数据的变化趋势,并且期望所有数据点上的残差平方和最小。即:
[0187][0188]
为了使拟合后的多项式函数过起点,在上式中,把[z
w
(t0)
‑
z
w0
]2从求和公式中单独列出并乘以较大的系数k0,以加大数据起点的权重。实际应用时,可以根据规划数据点的个数取足够大的k0,使拟合后的多项式函数尽可能地靠近起点,以达到设计者所期望的精度要求。
[0189]
将上式对a0,
…
,a
k
求偏导,可得到关于a0,
…
,a
k
的ξ阶方程组,通过克莱姆法则可以解出a0,
…
,a
k
的值。
[0190]
s3:基于平滑处理后的质心轨迹与姿态历程,计算车辆以主动悬挂驶过车前地形的各悬挂的行程历程s
ij
和悬挂支撑力历程w
ij
。
[0191]
s31:将步骤s22中平滑后的车辆质心轨迹和姿态历程作为输入,计算车辆以主动悬挂驶过车前地形时各悬挂相对于被动悬挂的行程历程和速度历程具体步骤如下。
[0192]
①
基于s21中求得的车辆以被动悬挂驶过车前地形的车辆坐标系6维坐标历程{x
i
,y
i
,z
i
,α
i
,β
i
,γ
i
}
t
,由下式求出各悬挂上支撑点q1、q2、
…
、q6的垂向位移历程为:
[0193][0194]
则各悬挂上支撑点q1、q2、
…
、q6的垂向速度历程为:
[0195][0196]
②
根据s22中平滑处理后得到的质心轨迹和姿态历程的函数{x
w
(t
i
),y
w
(t
i
),z
w
(t
i
),α
w
(t
i
),β
w
(t
i
),γw(t
i
)}
t
,反求出车辆坐标系相对固定坐标系的三个相关坐标时间历程为:
[0197][0198]
再由z(t
i
)、α(t
i
)、β(t
i
)求出各悬挂上支撑点q1、q2、
…
、q6垂向位移为:
[0199][0200]
各悬挂上支撑点q1、q2、
…
、q6的垂向速度为:
[0201][0202]
③
求各主动悬挂相对于被动悬挂的行程历程和速度历程
[0203]
各主动悬挂相对于被动悬挂的行程历程等于平滑处理后各主动悬挂上支撑点的垂向位移历程w
i,j
与平滑处理前被动悬挂上支撑点的垂向位移历程之差:
[0204][0205]
各主动悬挂相对于被动悬挂的速度历程等于平滑处理后各主动悬挂上支撑点的垂向速度历程与平滑处理前被动悬挂上支撑点的垂向速度历程之差:
[0206][0207]
s32:由车辆动力学模型计算以主动悬挂驶过车前地形的车辆各悬挂行程历程s
i,j
和支撑力历程w
ij
,具体步如下。
[0208]
①
求各主动悬挂上支撑点的垂向位移历程w
′
i,j
和垂向速度历程
[0209]
根据主动/被动悬挂行程差历程和速度差历程由车辆动力学模型求解得到主动悬挂车辆驶过车前地形的新状态变量{q
′
12
}
i
,i=0,1,2,
……
,n。将其中所包括的位移变量z
′
i
,α
′
i
,β
′
i
,代入下式求出各悬挂上支撑点q1、q2、
…
、q6的垂向位移历程:
[0210]
w
′
i,j
=z
′
i
‑
b
j
β
′
i
+l
j
α
′
i
,i=0、1、2、
…
、n;j=1、2、
…
、6
[0211]
将其中的速度变量值,代入下式求出各悬挂上支撑点q1、q2、
…
、q6的垂向速度历程为:
[0212][0213]
②
求各主动悬挂相对于中位的行程历程s
i,j
[0214]
因轮胎的垂向变形远小于主动悬挂的行程,这里暂且略去轮胎的垂向变形,轮胎的垂向变形将在s4中的悬挂阻抗控制中得到补偿。则各主动悬挂相对于中位的行程历程等于各主动悬挂上支撑点q1、q2、
…
、q6的垂向位移历程w
′
i,j
与各车轮接地点r1、r2、
…
、r6的垂向位移历程
△
i,j
之差。
[0215]
s
i,j
=w
′
i,j
‑△
i,j
,i=0、1、2、
…
、n;j=1、2、
…
、6
[0216]
③
求各主动悬挂的支撑力历程w
i,j
[0217]
车辆各主动悬挂的支撑力历程为:
[0218][0219]
式中,
△
i,j
与分别为各车轮接地点r1、r2、
…
、r6的垂向位移历程与速度历程。
[0220]
s4:对悬挂作动器实施基于力
‑
位移的阻抗控制,具体实现方法如下:
[0221]
①
求解悬挂阻抗控制的位移控制量
[0222]
设当前悬挂支撑力实测值为它可由悬挂缸上安装的支撑力传感器13
‑
1、13
‑
2、
…
、13
‑
6测出。根据车轮与地面的接触力简化模型,可得悬挂期望行程增量δ
i,j
为:
[0223][0224]
式中,k为车轮与地面的接触刚度。
[0225]
则各主动悬挂的目标位移为:
[0226][0227]
②
校验全历程内各悬挂行程是否存在越过极限行程的情况
[0228]
校验式为:
[0229][0230]
式中:s
min
——悬挂的下极限位移;
[0231]
s
max
——悬挂的上极限位移。
[0232]
若存在有的悬挂超过极限行程,则首先降低对车辆轨迹曲线的平滑度,调整相应的平滑系数ξ,分以下两种情况分别进行处理:
[0233]
①
若平滑系数ξ尚未达到预设的平滑系数极限值,则转到步骤s22。
[0234]
②
若平滑系数ξ已达平滑系数极限值,仍然不能满足全历程内各悬挂行程不超过极限行程的条件,按照出现的时间顺序找到悬挂行程超过极限行程的第一个数据点,设其在步骤s2中规划数据点的编号为i
e
(1≤i
e
≤n),则令n=i
e
,并返回步骤s21。
[0235]
通过以上处理可使全历程内各悬挂行程均不超过极限行程。
[0236]
③
对主动悬挂实施pid位移控制
[0237]
设悬挂相对中位行程的实测值为它可由悬挂缸上安装的行程传感器12
‑
1、12
‑
2、
…
、12
‑
6测出,根据前面校验后的各悬挂目标行程将其与实测悬挂行程作比较,对主动悬挂的行程进行pid控制。
[0238]
以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1