具有升降功能的全地形移动机器人的制作方法
1.本发明属于机器人技术领域,涉及一种具有升降功能的全地形移动机器人。
背景技术:
2.随着科学技术的不断发展,越来越多的重复性、复杂性、危险性场景中的工作由机器人替代,机器人辅助人工变为可能,在配送及巡检应用中发挥着越来越重要的作用。现有移动机器人的结构相对固定,无法调节行走轮相对底盘的高度,导致其通行能力受到限制。特别是两轮机器人,在跨越体积较大的障碍物、通过低矮通道、斜坡或者崎岖地形时,机器人丧失通行能力或由于机身倾斜过大,导致承载的物体脱落,甚至造成机身倾覆。
3.为此,中国专利公开了一种机械腿和轮式移动设备[申请公布号为cn111776106a],机械腿包括机体、伸缩件、车轮、伸缩驱动件、行走驱动件、辅助腿和辅助轮;伸缩驱动件位于机体的侧部,伸缩件与伸缩驱动件相连,车轮与伸缩件相连,车轮还与行走驱动件相连,辅助腿的第一端连接辅助轮,辅助腿的第二端位于机体上。伸缩件在伸缩驱动件的驱动下伸缩,以带动车轮跳跃,车轮在行走驱动件的驱动下运动,辅助轮与地面相接触时,机械腿在车轮和辅助轮的滚动下运动。
[0004]
虽然上述的机械腿可通过伸缩件来调节车轮相对机体的高度,但其目的是实现跳跃缓冲,而且两侧的伸缩件同步运动,当左右侧路面存在高度差时,机体不能保持水平状态,甚至有侧倾的风险。转向时受离心力的影响,稳定性差,影响运动性能。
技术实现要素:
[0005]
本发明的目的是针对现有的技术存在上述问题,提出了一种通行能力强的具有升降功能的全地形移动机器人。
[0006]
本发明的目的可通过下列技术方案来实现:
[0007]
具有升降功能的全地形移动机器人,包括机架,所述机架的一侧设有由第一驱动组件驱动的第一伸缩组件,所述第一伸缩组件上设有由第一动力单元驱动的第一轮体,所述机架的另一侧设有由第二驱动组件驱动的第二伸缩组件,所述第二伸缩组件上设有由第二动力单元驱动的第二轮体,所述第一驱动组件与第二驱动组件沿机架的中心轴对称设置,当第一轮体与第二轮体同轴时第一伸缩组件与第二伸缩组件沿机架的中心轴对称设置。
[0008]
第一驱动组件与第二驱动组件可独立工作,提高了机器人转弯和颠簸路面的稳定性。当第一驱动组件与第二驱动组件同步动作时,第一伸缩组件与第二伸缩组件同步动作,从而调节第一轮体、第二轮体相对机架的高度,提高机器人的通过性。
[0009]
在上述具有升降功能的全地形移动机器人中,所述第一伸缩组件包括中部铰接设置的第一支撑杆和第二支撑杆,所述第一支撑杆的下端铰接有第一转动连杆,所述第二支撑杆的下端铰接有第二转动连杆,所述第一转动连杆远离第一支撑杆的一端与第二转动连杆远离第二支撑杆的一端铰接,所述第一支撑杆的上端与机架滑动连接,所述第二支撑杆
的上端与机架滑动连接,所述第一驱动组件作用在第一支撑杆与第二支撑杆之间。
[0010]
第一驱动组件的作用是使第一支撑杆的上端靠近或远离第二支撑杆的上端,达到调节第一支撑杆与第二支撑杆之间夹角的目的,以此调节第一转动连杆与第二转动连杆之间的夹角,从而带动第一轮体相对于机架上升或下降。
[0011]
在上述具有升降功能的全地形移动机器人中,所述机架上固定有沿前后方向延伸且同轴设置的第一导向轴与第二导向轴,所述第一导向轴上滑动套设有第一滑座,所述第一支撑杆的上端与第一滑座铰接,所述第二导向轴上滑动套设有第二滑座,所述第二支撑杆的上端与第二滑座铰接。
[0012]
第一支撑杆与第二支撑杆通过第一销轴铰接,第一支撑杆与第一转动连杆通过第二销轴铰接,第二支撑杆与第二转动连杆通过第三销轴铰接,第一销轴、第二销轴和第三销轴均沿左右方向水平延伸,第二销轴至第一销轴的距离等于第三销轴至第一销轴的距离。第一支撑杆通过第四销轴与第一滑座铰接,第二支撑杆通过第五销轴与第二滑座铰接,第四销轴与第五销轴沿左右方向水平延伸,第四销轴至第一销轴的距离等于第五销轴至第一销轴的距离。
[0013]
在上述具有升降功能的全地形移动机器人中,所述机架上固定有位于第一导向轴与第二导向轴之间的第一铰接座,所述第一铰接座上铰接有第一拉杆和第二拉杆,所述第一拉杆的下端与第一支撑杆铰接,所述第二拉杆的下端与第二支撑杆铰接。
[0014]
第一铰接座、第一拉杆和第二拉杆通过第六销轴铰接,第一拉杆通过第七销轴与第一支撑杆铰接,第二拉杆通过第八销轴与第二支撑杆铰接,第六销轴、第七销轴和第八销轴沿左右方向水平延伸,第七销轴位于第一销轴与第四销轴之间,第八销轴位于第一销轴与第五销轴之间,第七销轴至第六销轴的距离等于第八销轴至第六销轴的距离,第六销轴位于第一销轴的正上方。
[0015]
在上述具有升降功能的全地形移动机器人中,所述第一驱动组件包括固定在机架上的第一电动推杆,所述第一电动推杆的驱动方向沿前后方向水平延伸,所述第一电动推杆的输出端一作用在第一滑座/第二滑座上。
[0016]
当第一电动推杆的输出端一作用在第一滑座上时,第一电动推杆工作时其输出端一将带动第一滑座在第一导向轴上前后运动;当第一电动推杆的输出端一作用在第二滑座上时,第一电动推杆工作时其输出端一将带动第二滑座在第二导向轴上前后运动。第一驱动组件除了采用第一电动推杆外,还可以采用其他直线驱动机构,如液压缸、气缸或电缸等。
[0017]
在上述具有升降功能的全地形移动机器人中,所述第二转动连杆远离第二支撑杆的一端固定有与第一轮体同轴设置的第一旋转法兰,所述第一转动连杆远离第一支撑杆的一端套设在第一旋转法兰上且与第一旋转法兰转动配合。
[0018]
第一旋转法兰始终位于第一销轴的正下方,第二销轴至第一旋转法兰的距离等于第三销轴至第一旋转法兰的距离。第一动力单元为设于第一轮体内的轮毂电机,轮毂电机的内转子同轴固定在第一旋转法兰上,轮毂电机的外定子同轴套设在内转子外侧,第一轮体与该轮毂电机的外定子同轴固连。
[0019]
在上述具有升降功能的全地形移动机器人中,所述第二伸缩组件包括中部铰接设置的第三支撑杆和第四支撑杆,所述第三支撑杆的下端铰接有第三转动连杆,所述第四支
撑杆的下端铰接有第四转动连杆,所述第三转动连杆远离第三支撑杆的一端与第四转动连杆远离第四支撑杆的一端铰接,所述第三支撑杆的上端与机架滑动连接,所述第四支撑杆的上端与机架滑动连接,所述第二驱动组件作用在第三支撑杆与第四支撑杆之间。
[0020]
第二驱动组件的作用是使第三支撑杆的上端靠近或远离第四支撑杆的上端,达到调节第三支撑杆与第四支撑杆之间夹角的目的,以此调节第三转动连杆与第四转动连杆之间的夹角,从而带动第二轮体相对于机架上升或下降。
[0021]
在上述具有升降功能的全地形移动机器人中,所述机架上固定有沿前后方向延伸且同轴设置的第三导向轴与第四导向轴,所述第三导向轴上滑动套设有第三滑座,所述第三支撑杆的上端与第三滑座铰接,所述第四导向轴上滑动套设有第四滑座,所述第四支撑杆的上端与第四滑座铰接。
[0022]
第三支撑杆与第四支撑杆通过第十一销轴铰接,第三支撑杆与第三转动连杆通过第十二销轴铰接,第四支撑杆与第四转动连杆通过第十三销轴铰接,第十一销轴、第十二销轴和第十三销轴均沿左右方向水平延伸,第十二销轴至第十一销轴的距离等于第十三销轴至第十一销轴的距离。第三支撑杆通过第十四销轴与第三滑座铰接,第四支撑杆通过第十五销轴与第四滑座铰接,第十四销轴与第十五销轴沿左右方向水平延伸,第十四销轴至第十一销轴的距离等于第十五销轴至第十一销轴的距离。
[0023]
在上述具有升降功能的全地形移动机器人中,所述机架上固定有位于第三导向轴与第四导向轴之间的第二铰接座,所述第二铰接座上铰接有第三拉杆和第四拉杆,所述第三拉杆的下端与第三支撑杆铰接,所述第四拉杆的下端与第四支撑杆铰接。
[0024]
第二铰接座、第三拉杆和第四拉杆通过第十六销轴铰接,第三拉杆通过第十七销轴与第三支撑杆铰接,第四拉杆通过第十八销轴与第四支撑杆铰接,第十六销轴、第十七销轴和第十八销轴沿左右方向水平延伸,第十七销轴位于第十一销轴与第十四销轴之间,第十八销轴位于第十一销轴与第十五销轴之间,第十七销轴至第十六销轴的距离等于第十八销轴至第十六销轴的距离,第十六销轴位于第十一销轴的正上方。
[0025]
在上述具有升降功能的全地形移动机器人中,所述第二驱动组件包括固定在机架上的第二电动推杆,所述第二电动推杆的驱动方向沿前后方向水平延伸,所述第二电动推杆的输出端二作用在第三滑座/第四滑座上。
[0026]
当第二电动推杆的输出端二作用在第三滑座上时,第二电动推杆工作时其输出端二将带动第三滑座在第三导向轴上前后运动;当第二电动推杆的输出端二作用在第四滑座上时,第二电动推杆工作时其输出端二将带动第四滑座在第四导向轴上前后运动。第二驱动组件除了采用第二电动推杆外,还可以采用其他直线驱动机构,如液压缸、气缸或电缸等。
[0027]
在上述具有升降功能的全地形移动机器人中,所述第四转动连杆远离第四支撑杆的一端固定有与第二轮体同轴设置的第二旋转法兰,所述第三转动连杆远离第三支撑杆的一端套设在第二旋转法兰上且与第二旋转法兰转动配合。
[0028]
第二旋转法兰始终位于第十一销轴的正下方,第十二销轴至第二旋转法兰的距离等于第十三销轴至第二旋转法兰的距离。第二动力单元为设于第二轮体内的轮毂电机,轮毂电机的内转子同轴固定在第二旋转法兰上,轮毂电机的外定子同轴套设在内转子外侧,第二轮体与该轮毂电机的外定子同轴固连。
[0029]
在上述具有升降功能的全地形移动机器人中,所述机架的底部设有第一辅助轮和第二辅助轮,所述第一辅助轮与第二辅助轮沿机架的中心轴对称设置。
[0030]
与现有技术相比,本具有升降功能的全地形移动机器人具有以下优点:由于设有第一伸缩组件与第二伸缩组件,可解决机器人高度固定的问题,增强了机器人的通行能力;机器人在升降时,可始终保持水平状态,避免货物脱落甚至造成机身倾覆,提高机器人的稳定性;第一轮体与第二轮体可独立升降,可实现机器人重心的自由调节,便于平衡控制和改善机体的倾斜度;在颠簸路面实时调节两轮的相对高度,起减震作用,减震效果好;通过单边桥时,主动调节第一轮体与第二轮体的相对高度,使机器人始终保持水平状态,增强机器人的稳定性;转弯时主动调节第一轮体与第二轮体的相对高度,使重心横向移动,通过重力抵消离心力,增强转弯稳定性。
附图说明
[0031]
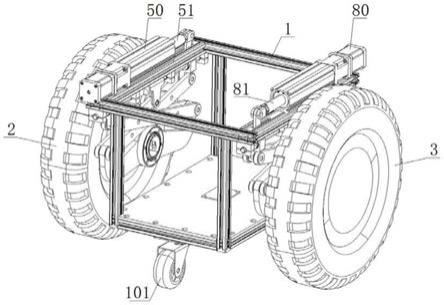
图1是本发明提供的机器人的结构示意图。
[0032]
图2是本发明提供的第一伸缩组件的正视图。
[0033]
图3是本发明提供的第一伸缩组件的结构示意图。
[0034]
图4是本发明提供的第二伸缩组件的正视图。
[0035]
图5是本发明提供的第一旋转法兰处的剖视图。
[0036]
图6是本发明提供的第二旋转法兰处的剖视图。
[0037]
图中,1、机架;2、第一轮体;3、第二轮体;41、第一支撑杆;42、第二支撑杆;43、第一转动连杆;44、第二转动连杆;45、第一导向轴;46、第二导向轴;47、第一滑座;48、第二滑座;49、第一铰接座;491、第一拉杆;492、第二拉杆;50、第一电动推杆;51、输出端一;60、第一旋转法兰;71、第三支撑杆;72、第四支撑杆;73、第三转动连杆;74、第四转动连杆;75、第三导向轴;76、第四导向轴;77、第三滑座;78、第四滑座;79、第二铰接座;791、第三拉杆;792、第四拉杆;80、第二电动推杆;81、输出端二;90、第二旋转法兰;101、第一辅助轮;102、第二辅助轮。
具体实施方式
[0038]
以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
[0039]
如图1所示的具有升降功能的全地形移动机器人,包括机架1,该机架1包括一个矩形框架和设于矩形框架底部的底板,在底板上设置imu模块,用于控制机器人的各种动作。如图1所示,在底板上设有第一辅助轮101和第二辅助轮102,第一辅助轮101位于后方,第二辅助轮102位于第一辅助轮101的正前方,且第一辅助轮101与第二辅助轮102沿机架1的中心轴对称设置,第一辅助轮101与底板之前设有减震弹簧,在第二辅助轮102与底板之间也设有减震弹簧。由于设有减震弹簧,当机架1下降到最低时,可通过压缩减震弹簧使第一辅助轮101与第二辅助轮102与地面完全接触。
[0040]
如图1所示,矩形框架的左右两侧上部分别具有水平向外凸起的延伸部,在位于左侧的延伸部上设有由第一驱动组件驱动的第一伸缩组件,第一伸缩组件上设有由第一动力单元驱动的第一轮体2,在位于右侧的延伸部上设有由第二驱动组件驱动的第二伸缩组件,
第二伸缩组件上设有由第二动力单元驱动的第二轮体3,第一驱动组件与第二驱动组件沿机架1的中心轴对称设置,当第一轮体2与第二轮体3同轴时第一伸缩组件与第二伸缩组件沿机架1的中心轴对称设置。本实施例中,第一驱动组件与第二驱动组件可独立工作,也可同时动作,均有设于底板上的imu模块控制。
[0041]
具体的,如图2所示,第一伸缩组件包括中部相互铰接设置的第一支撑杆41和第二支撑杆42,第一支撑杆41的下端铰接有第一转动连杆43,第二支撑杆42的下端铰接有第二转动连杆44,第一转动连杆43远离第一支撑杆41的一端与第二转动连杆44远离第二支撑杆42的一端铰接,第一支撑杆41的上端与机架1滑动连接,第二支撑杆42的上端与机架1滑动连接,第一驱动组件作用在第一支撑杆41与第二支撑杆42之间。
[0042]
第一驱动组件的作用是使第一支撑杆41的上端靠近或远离第二支撑杆42的上端,达到调节第一支撑杆41与第二支撑杆42之间夹角的目的,以此调节第一转动连杆43与第二转动连杆44之间的夹角,从而带动第一轮体2相对于机架1上升或下降。
[0043]
具体的,如图2所示,位于左侧的延伸部上固定有沿前后方向延伸且同轴设置的第一导向轴45与第二导向轴46,第一导向轴45上滑动套设有第一滑座47,第一支撑杆41的上端与第一滑座47铰接,第二导向轴46上滑动套设有第二滑座48,第二支撑杆42的上端与第二滑座48铰接。
[0044]
本实施例中,第一支撑杆41与第二支撑杆42通过第一销轴铰接,第一支撑杆41与第一转动连杆43通过第二销轴铰接,第二支撑杆42与第二转动连杆44通过第三销轴铰接,第一销轴、第二销轴和第三销轴均沿左右方向水平延伸,第二销轴至第一销轴的距离等于第三销轴至第一销轴的距离。第一支撑杆41通过第四销轴与第一滑座47铰接,第二支撑杆42通过第五销轴与第二滑座48铰接,第四销轴与第五销轴沿左右方向水平延伸,第四销轴至第一销轴的距离等于第五销轴至第一销轴的距离。
[0045]
如图2所示,第一驱动组件包括固定在机架1上的第一电动推杆50,第一电动推杆50的驱动方向沿前后方向水平延伸,第一电动推杆50的输出端一51作用在第二滑座48上。第一电动推杆50工作时其输出端一51将带动第二滑座48在第二导向轴46上前后运动。
[0046]
在一些其他实施例中,第一驱动组件除了采用第一电动推杆50外,还可以采用其他直线驱动机构,如液压缸、气缸或直线电缸等。
[0047]
如图2所示,机架1上固定有位于第一导向轴45与第二导向轴46之间的第一铰接座49,第一铰接座49上铰接有第一拉杆491和第二拉杆492,第一拉杆491的下端与第一支撑杆41铰接,第二拉杆492的下端与第二支撑杆42铰接。第一铰接座49、第一拉杆491和第二拉杆492通过第六销轴铰接,第一拉杆491通过第七销轴与第一支撑杆41铰接,第二拉杆492通过第八销轴与第二支撑杆42铰接,第六销轴、第七销轴和第八销轴沿左右方向水平延伸,第七销轴位于第一销轴与第四销轴之间,第八销轴位于第一销轴与第五销轴之间,第七销轴至第六销轴的距离等于第八销轴至第六销轴的距离,第六销轴位于第一销轴的正上方。
[0048]
具体的,如图3所示,第一支撑杆41为两根且相互平行设置,第二支撑杆42为两根且相互平行设置,第一拉杆491远离第一铰接座49的一端位于两第一支撑杆41之间,第二拉杆492远离第二铰接座79的一端位于两第二支撑杆42之间。增强了结构强度,提高了稳定性。
[0049]
如图5所示,第二转动连杆44远离第二支撑杆42的一端固定有与第一轮体2同轴设
置的呈筒状的第一旋转法兰60,第一转动连杆43远离第一支撑杆41的一端套设在第一旋转法兰60上且与第一旋转法兰60转动配合。第一旋转法兰60始终位于第一销轴的正下方,第二销轴至第一旋转法兰60的距离等于第三销轴至第一旋转法兰60的距离。第一动力单元为设于第一轮体2内的轮毂电机,轮毂电机的内转子同轴固定在第一旋转法兰60上,轮毂电机的外定子同轴套设在内转子外侧,第一轮体2与该轮毂电机的外定子同轴固连。
[0050]
如图4所示,第二伸缩组件包括中部相互铰接设置的第三支撑杆71和第四支撑杆72,第三支撑杆71的下端铰接有第三转动连杆73,第四支撑杆72的下端铰接有第四转动连杆74,第三转动连杆73远离第三支撑杆71的一端与第四转动连杆74远离第四支撑杆72的一端铰接,第三支撑杆71的上端与机架1滑动连接,第四支撑杆72的上端与机架1滑动连接,第二驱动组件作用在第三支撑杆71与第四支撑杆72之间。
[0051]
第二驱动组件的作用是使第三支撑杆71的上端靠近或远离第四支撑杆72的上端,达到调节第三支撑杆71与第四支撑杆72之间夹角的目的,以此调节第三转动连杆73与第四转动连杆74之间的夹角,从而带动第二轮体3相对于机架1上升或下降。
[0052]
如图4所示,位于右侧的延伸部上固定有沿前后方向延伸且同轴设置的第三导向轴75与第四导向轴76,第三导向轴75上滑动套设有第三滑座77,第三支撑杆71的上端与第三滑座77铰接,第四导向轴76上滑动套设有第四滑座78,第四支撑杆72的上端与第四滑座78铰接。
[0053]
第三支撑杆71与第四支撑杆72通过第十一销轴铰接,第三支撑杆71与第三转动连杆73通过第十二销轴铰接,第四支撑杆72与第四转动连杆74通过第十三销轴铰接,第十一销轴、第十二销轴和第十三销轴均沿左右方向水平延伸,第十二销轴至第十一销轴的距离等于第十三销轴至第十一销轴的距离。第三支撑杆71通过第十四销轴与第三滑座77铰接,第四支撑杆72通过第十五销轴与第四滑座78铰接,第十四销轴与第十五销轴沿左右方向水平延伸,第十四销轴至第十一销轴的距离等于第十五销轴至第十一销轴的距离。
[0054]
如图4所示,机架1上固定有位于第三导向轴75与第四导向轴76之间的第二铰接座79,第二铰接座79上铰接有第三拉杆791和第四拉杆792,第三拉杆791的下端与第三支撑杆71铰接,第四拉杆792的下端与第四支撑杆72铰接。第二铰接座79、第三拉杆791和第四拉杆792通过第十六销轴铰接,第三拉杆791通过第十七销轴与第三支撑杆71铰接,第四拉杆792通过第十八销轴与第四支撑杆72铰接,第十六销轴、第十七销轴和第十八销轴沿左右方向水平延伸,第十七销轴位于第十一销轴与第十四销轴之间,第十八销轴位于第十一销轴与第十五销轴之间,第十七销轴至第十六销轴的距离等于第十八销轴至第十六销轴的距离,第十六销轴位于第十一销轴的正上方。
[0055]
本实施例中,如图4所示,第二驱动组件包括固定在机架1上的第二电动推杆80,第二电动推杆80的驱动方向沿前后方向水平延伸,第二电动推杆80的输出端二81作用在第三滑座77上。第二电动推杆80工作时其输出端二81将带动第三滑座77在第三导向轴75上前后运动。
[0056]
在一些其他实施例中,第二驱动组件除了采用第二电动推杆80外,还可以采用其他直线驱动机构,如液压缸、气缸或直线电缸等。
[0057]
如图6所示,第四转动连杆74远离第四支撑杆72的一端固定有与第二轮体3同轴设置的呈筒状的第二旋转法兰90,第三转动连杆73远离第三支撑杆71的一端套设在第二旋转
法兰90上且与第二旋转法兰90转动配合。
[0058]
第二旋转法兰90始终位于第十一销轴的正下方,第十二销轴至第二旋转法兰90的距离等于第十三销轴至第二旋转法兰90的距离。第二动力单元为设于第二轮体3内的轮毂电机,轮毂电机的内转子同轴固定在第二旋转法兰90上,轮毂电机的外定子同轴套设在内转子外侧,第二轮体3与该轮毂电机的外定子同轴固连。
[0059]
本机器人为中心对称结构,其对称中心轴由上往下贯通底板设置。当第一轮体2与第二轮体3同轴时,第一轮体2与第二轮体3沿该中心轴对称设置,第一辅助轮101与第二辅助轮102沿中心轴对称设置,第一电动推杆50与第二电动推杆80沿该中心轴对称设置,第一铰接座49与第二铰接座79沿该中心轴对称设置,第一转动连杆43与第三转动连杆73沿该中心轴对称设置,第二转动连杆44与第四转动连杆74沿该中心轴对称设置,第一支撑杆41与第三支撑杆71沿该中心轴对称设置,第二支撑杆42与第四支撑杆72沿该中心轴对称设置,第一拉杆491与第三拉杆791沿该中心轴对称设置,第二拉杆492与第四拉杆792沿该中心轴对称设置,且第一旋转法兰60与第二旋转法兰90同轴,第一销轴与第十一销轴同轴,第二销轴与第十二销轴同轴,第三销轴与第十三销轴同轴,第四销轴与第十四销轴同轴,第五销轴与第十五销轴同轴,第六销轴与第十六销轴同轴,第七销轴与第十七销轴同轴,第八销轴与第十八销轴同轴。
[0060]
机器人以一般形态在平面上行走,当遇到高度低于机器人高度的上方障碍时,第一电动推杆50和第二电动推杆80快速伸长,降低机器人的整体高度,使其能顺利通过障碍物。当遇到较高的下方障碍物时,第一电动推杆50和第二电动推杆80快速收缩,升高机器人机架1的高度,使其能跨越障碍物。
[0061]
当第一轮体2与第二轮体3输出的力矩一定时,机器人的重心越高倾角越小,当机器人的倾角接近临界倾角时,第一电动推杆50和第二电动推杆80快速伸长,抬高机器人重心,起到减小倾角的作用。
[0062]
在行走过程中通过机器人上的imu模块实时检测机体翻滚角,通过翻滚角和第一电动推杆50、第二电动推杆80的伸出长度可计算出两侧升降机构的高度差,调整第一轮体2与第二轮体3的高度差,保证机体水平。
[0063]
转弯时根据机器人的质量、线速度和角速度计算出离心力,根据离心力和当前机器人的重心高度算出需要的重心偏移量,再根据重心偏移量算出第一轮体2与第二轮体3的高度差,控制第一电动推杆50和第二电动推杆80的伸出长度。使离心力产生的力矩与重心偏移产生的力矩相等,机器人处于稳定状态。
[0064]
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1