危险品半挂运输车制动气室压力变化率监控方法与系统
1.本发明属于汽车制动领域,尤其涉及一种危险品半挂运输车ecpbs制动气室压力变化率的在线监控方法和系统。
背景技术:
2.商用车ecpbs(电子控制气动制动系统)对减速度的控制和响应是其设计过程中的重要指标,但这些指标仅能用最终的制动效果来评价,对在制动动作过程中的制动压力变化特性缺乏相应的评价指标、有效的检测方式和控制手段。
3.危险品半挂运输车ecpbs由牵引车ebs(电子制动控制系统)模块和半挂车ebs(电子制动控制系统)模块组成,中间通过标准的电、气接口连接,统一由牵引车上的ecpbs ecu控制。关于牵引车和半挂车之间的机械互换性、电气接口连接协议及组成汽车列车后的制动系统功能和性能要求均有相应标准,建立了汽车列车制动性能正常运行的基础。
4.在实际使用中,基础的车辆信息如牵引车和半挂车各自的长度、轴距、载荷信息和ebs布置信息等会储存在牵引车和挂车ebs轴控模块自带的独立电控单元中,方便ecpbs ecu综合调用。但值得注意的是牵引车和半挂车各自ebs的硬件属性,如底盘各气动元件之间连接管路的长度和各气压控制阀的调压特性等无法被记录在系统数据中,并最终导致在气压制动系统工作时,虽然在控制器算法设置中各轮的制动压力响应完全一致,但各个轴控模块的实际压力响应由于供给压力波动和系统传输时延等影响,存在与预期制动压力响应之间的压力或时间偏差。
5.同时,由于结构制造精度和形位误差等影响,即使是同一型号的轴控模块内部及不同模块之间也会产生实际制动压力响应和预期值之间的压力或时间偏差,产生额外的纵向、横向加速度和横摆角速度等影响车辆的制动安全。对于危险品半挂运输车而言,由于其载荷大、承载货物的危险性高且车辆行驶状态复杂,因此要求危险品半挂运输车ecpbs的制动压力必须被精确控制,各轴、轮间的制动力的大小和构建有效制动压力的时间应与期望值保持一致,并且能够保证输出压力的稳定性和平顺性。综上所述,需纳入一种同时考虑制动压力大小及建立有效压力所需时间的偏差的新参数,作为危险品半挂运输车ecpbs控制器评价和控制车辆制动状态的新指标。
6.cn111572524a中公开了一种车辆气压制动压力变化率测量方法及装置,旨在实现制动压力变化率的实时精确测量,为基于制动压力变化率的车辆态势控制提供参考信息,可提升车辆态势控制精度,提高车辆行驶稳定性、平顺性和乘客舒适性。但是该种车辆气压制动压力变化率测量装置仅仅针对于通用车辆,精度和测量方式无法应用于危险品半挂运输车。目前危险品半挂运输车并无有效方案对制动压力变化率进行实时监测,仅在试验台层面完成了功能的实现,缺乏结合车辆结构的实现方案。
技术实现要素:
7.本发明要解决的技术问题是,针对现有技术的以上缺陷或需求,提出一种危险品
半挂运输车制动气室压力变化率监控方法与系统,能够实现危险品运输车制动气室压力变化率的实时精确测量,为基于制动压力变化率的车辆态势控制提供参考信息,同时提升车辆态势控制精度,提高车辆行驶稳定性、平顺性和乘客舒适性,有效解决目前商用车气压制动系统存在的无法自主辨识车辆制动需求、实际制动压力响应和期望制动压力响应之间存在压力偏差和时间偏差,以及无法对车轮制动力实现有效的独立调节等问题。
8.为解决上述技术问题,本发明采用如下技术方案:
9.一种危险品半挂运输车制动气室压力变化率监控系统,其特征在于包括:层流阻尼管、等温容器、压差传感器、压力传感器、危险品半挂运输车的ecpbs轴控模块和ecpbs ecu;其中,将危险品半挂运输车ecpbs的各制动气室与一个等温容器利用1根层流阻力管相连,将压差传感器的两端分别接在制动气室和等温容器上,同时等温容器上安装有压力传感器;所述层流阻力管设置多个流道;待测量的制动气室与危险品半挂运输车的ecpbs轴控模块相连,危险品半挂运输车的ecpbs轴控模块设置为接受ecpbs ecu的指令而进行调压作动使得待测量的制动气室内压力产生变化。
10.进一步地,所述层流阻尼管的第一端及所述压差传感器的第一端分别与待测量的制动气室连接,所述层流阻尼管的第二端及所述压差传感器的第二端均与所述等温容器连接,所述等温容器的另一端与所述压力传感器的一端连接,所述压力传感器的另一端及所述压差传感器的另一端均与ecpbs ecu相连。
11.进一步地,所述层流阻尼管位于所述待测量的制动气室和等温容器之间,所述层流阻尼管由多条内半径相同长度一致的毛细管并联插入气管中构成。
12.进一步地,所述危险品半挂运输车ecpbs制动气室压力变化率监控系统安装在危险品半挂运输车的各个制动气室上,半挂车制动气室上的传感器经由半挂车与牵引车的电控接口传输给ecpbs ecu。
13.一种危险品半挂运输车制动气室压力变化率监控方法,其特征在于利用已知参数的等温容器和层流阻力管,通过在线监控等温容器内部压力和等温容器与危险品半挂运输车制动气室之间的压力差,并基于危险品半挂运输车ecpbs制动气室压力变化率测量模型来计算出危险品半挂运输车ecpbs的每一个制动气室的制动压力变化率。
14.进一步地,危险品半挂运输车ecpbs制动气室压力变化率测量模型为:
[0015][0016]
式中,v
d
为等温容器体积,单位为m3;p
d
为压力传感器测得的等温容器内压力,单位为pa;r为气体常数,单位为j/(kg
·
k);θ为等温容器内温度,单位为k;μ为气体黏性系数,单位为pa
·
s;p为大气压力,单位为pa;p
q
为制动气室压力,单位为pa;ρ
d
为等温容器内压缩气体密度,单位为kg/m3;ρ为大气密度,单位为kg/m3;n为流道的个数;l为流道的长度,单位为m;r为流道的半径,m;p
c
为压差传感器的测量值,pa;g
d
为流过层流阻力管进入等温容器内的气体质量流量,单位为kg/s。
[0017]
进一步地,上述方法包括如下步骤:
[0018]
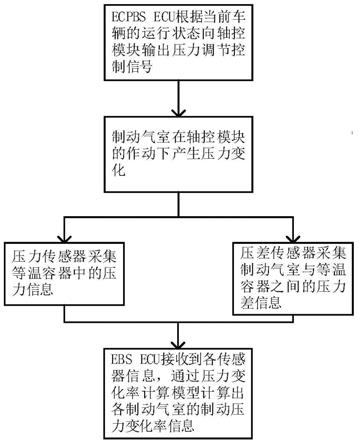
s1:危险品半挂运输车ecpbs的ecpbs ecu向ecpbs的轴控模块输出压力调节控制信号;
[0019]
s2:在ecpbs轴控模块的调压作用下,危险品半挂运输车的制动气室内部气压产生
变化;
[0020]
s3:测得等温容器内的压力,测量等温容器与制动气室之间的压差,并将所述压力和压差信息传递给ecpbs ecu;
[0021]
s4:ecpbs ecu在接收到所述信息后,ecpbs ecu借由内置的制动压力变化率模型计算当前时刻制动气室内的制动压力变化率,并作为压力控制的参考参数。
[0022]
步骤s3中,所述压力和压差信息一同经过车载总线传输给ecpbs ecu。
[0023]
步骤s4中,计算危险品半挂运输车ecpbs的每一个制动气室的制动压力变化率。
[0024]
制动压力变化率模型按照如下原理获得:
[0025]
在所述待测量的制动气室内压力产生变化时,受所述层流阻尼管的流阻作用,等温容器内的压力变化相对滞后于制动气室,此时通过压差传感器可测得两者之间的压差,再通过压力传感器测得此时等温容器内的压力;利用等温容器和层流阻力管的已知属性,通过在线监控两个变量(等温容器内部压力和其与制动气室之间的压力差)来计算出危险品半挂运输车ecpbs的每一个制动气室的制动压力变化率。
[0026]
所述层流阻尼管位于所述制动气室和所述等温容器之间,所述层流阻尼管由n个内半径为r,长度为l的毛细管并联插入流道为d的气管中构成;r<d。
[0027]
由理想气体状态方程全微分后可得,等温容器内气体状态方程为:
[0028][0029]
等温容器能够降低温度变化的影响,因此其内部为等积等温的,则等温容器内压力变化率为:
[0030]
等温容器内压力变化率与通过层流阻力管的气体质量流量成正比,则由泊肃叶定律可得,通过层流阻力管的体积流量为:
[0031]
由于等温容器内温度与大气温度相同,则联立二者理想气体状态方程得:由此可得流过层流阻力管进入等温容器内的气体质量流量g
d
为:
[0032]
压差传感器的测量值为:p
c
=p
q
‑
p
d
;综合可知,危险品半挂运输车ecpbs制动气室压力变化率的测量值为式中,v
d
为等温容器体积,单位为m3;p
d
为压力传感器测得的等温容器内压力,单位为pa;r为气体常数,单位为j/(kg
·
k);θ为等温容器内温度,单位为k;μ为气体黏性系数,单位为pa
·
s;p为大气压力,单位为pa;p
q
为制动气室压力,单位为pa;ρ
d
为等温容器内压缩气体密度,单位为kg/m3;ρ为大气密度,单位为kg/m3;n为流道的个数;l为流道的长度,单位为m;r为流道的半径,m;p
c
为压差传感器的测量值,pa;g
d
为流过层流阻力管进入等温容器内的气体质量流量,单位为kg/s。
[0033]
等温容器的容量体积数据将作为模型中的参数记录在ecpbs ecu中。
[0034]
总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
[0035]
本发明旨在实现对危险品半挂运输车ecpbs制动气室压力变化率的在线监控,从而为电控制动系统电控单元(ecpbs ecu:electronically controlled pneumatic brake system electronic control unit)评价轴控模块内部及不同模块间由于结构制造精度、形位误差等影响产生的实际制动压力响应与期望值之间的压力与时间偏差提供参考信息,及时检测危险品运输车ecpbs在制动过程中产生额外的纵向、横向加速度和横摆角速度,为提高该型车辆的制动安全性、稳定性和平顺性打下良好基础。
[0036]
本发明利用层流阻尼管、等温容器、压差传感器和压力传感器进行制动压力变化率的测量,当危险品半挂运输车制动时,ecpbs通过ecpbs ecu控制其轴控模块使各制动气室内压力改变,通过压差传感器测得等温容器和待测气室间的压差,通过压力传感器测得等温容器内的压力,将采集到的信号通过车载总线传输至ecpbs ecu,通过内置的制动压力变化率模型实时计算出当前时刻危险品半挂运输车ecpbs的制动压力变化率。将制动压力变化率作为危险品半挂运输车ecpbs对当前车辆制动状态的评价指标和控制指标,将制动气室的输出压力和时间关系进行了考量,通过控制制动压力变化率可以有效解决目前商用车气压制动系统存在的无法自主辨识车辆制动需求、实际制动压力响应和期望制动压力响应之间存在压力偏差和时间偏差,以及无法对车轮制动力实现有效的独立调节等问题。
附图说明
[0037]
图1是本发明实施例提供的一种危险品半挂运输车制动气室压力变化率实时监控方法的流程示意图。
[0038]
图2是本发明实施例提供的一种单制动气室压力变化率在线监控装置结构。
[0039]
图3是本发明实施例提供的一种危险品半挂运输车ecpbs制动气室压力变化率在线监控实现方案。
[0040]
附图中各附图标记如下:
[0041]
图2中:100
‑
轴控模块、200
‑
制动气室、300
‑
等温容器、400
‑
ebs ecu或ecpbs ecu、500
‑
层流阻力管、600
‑
压差传感器、700
‑
压力传感器。
[0042]
图3中:1
‑
空气压缩机 2
‑
干燥器 3
‑
储气罐 4
‑
四回路保护阀 5
‑
驻车储气罐 6
‑
半挂车制动手刹 7
‑
挂车阀 8
‑
主挂车气管接头 9
‑
驻车手控阀 10
‑
后轴储气罐 11
‑
后轴双腔制动气室 12
‑
磨损传感器 13
‑
轮速传感器 14
‑
前轴制动气室 15
‑
压力微分计 16
‑
自动调压阀 17
‑
电子制动踏板 18
‑
前轴储气罐 19
‑
ecpbs ecu 20
‑
缓速器ecu 21
‑
快放阀 22
‑
半挂车电控接口 23
‑
紧急继动阀 24
‑
挂车储气罐 25
‑
挂车驻车阀 26
‑
转向轮胎压传感器 27
‑
紧急切断阀控制管路压力传感器。
具体实施方案
[0043]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0044]
本发明实例中的“第一端”和“第二端”等适用于区分不同对象,不必用于描述特定的顺序和先后次序。
[0045]
如图1所示的危险品半挂运输车制动气室压力变化率实时检测方法的流程示意图,其中包含以下步骤:
[0046]
s1:危险品半挂运输车ecpbs的ecpbs ecu向其轴控模块输出压力调节控制信号;
[0047]
s2:危险品半挂运输车的制动气室在ecpbs轴控模块的调压作动下其内部气压产生变化;
[0048]
s3:利用压力传感器测得所述等温容器内的压力,利用压差传感器测量所述等温容器与所述制动气室之间的压差,并将这些信息通过车载总线传递给ecpbs ecu;
[0049]
s4:ecpbs ecu在接收到上述信息后,利用内部的制动压力变化率模型计算此时制动气室内的制动压力变化率,并作为压力控制的参考参数。
[0050]
制动压力变化率模型按照如下原理获得:
[0051]
在所述待测量的制动气室内压力产生变化时,受所述层流阻尼管的流阻作用,等温容器内的压力变化相对滞后于制动气室,此时通过压差传感器可测得两者之间的压差,再通过压力传感器测得此时等温容器内的压力;利用等温容器和层流阻力管的已知属性,通过在线监控两个变量(等温容器内部压力和其与制动气室之间的压力差)来计算出危险品半挂运输车的每一个制动气室的制动压力变化率。
[0052]
所述层流阻尼管位于所述制动气室和所述等温容器之间,所述层流阻尼管由n个内半径为r,长度为l的毛细管并联插入流道为d的气管中构成;r<d。
[0053]
由理想气体状态方程全微分后可得,等温容器内气体状态方程为:
[0054][0055]
等温容器能够降低温度变化的影响,因此其内部为等积等温的,则等温容器内压力变化率为:
[0056]
等温容器内压力变化率与通过层流阻力管的气体质量流量成正比,则由泊肃叶定律可得,通过层流阻力管的体积流量为:
[0057]
由于等温容器内温度与大气温度相同,则联立二者理想气体状态方程得:由此可得流过层流阻力管进入等温容器内的气体质量流量g
d
为:
[0058]
压差传感器的测量值为:p
c
=p
q
‑
p
d
;综合可知,危险品半挂运输车ecpbs制动气室压力变化率的测量值为式中,v
d
为等温容器体积,单位为m3;p
d
为压力传感器测得的等温容器内压力,单位为pa;r为气体常数,单位为j/(kg
·
k);θ为等温容器内温度,单位为k;μ为气体黏性系数,单位为pa
·
s;p为大气压力,单位为pa;p
q
为制动气室压
力,单位为pa;ρ
d
为等温容器内压缩气体密度,单位为kg/m3;ρ为大气密度,单位为kg/m3;n为流道的个数;l为流道的长度,单位为m;r为流道的半径,m;p
c
为压差传感器的测量值,pa;g
d
为流过层流阻力管进入等温容器内的气体质量流量,单位为kg/s。
[0059]
等温容器的容量体积数据将作为模型中的参数记录在ecpbs ecu中。
[0060]
如图2所示是本发明实施例提供的一种制动气室压力变化率在线监控装置的结构示意图,包括:层流阻尼管500、等温容器300、压差传感器600、压力传感器700、危险品半挂运输车的ecpbs轴控模块100和ecpbs ecu400;其中,所述层流阻尼管500的第一端及所述压差传感器600的第一端分别与待测量的制动气室连接,所述层流阻尼管500的第二端及所述压差传感器的第二端均与所述等温容器300连接,所述等温容器300的另一端与所述压力传感器的一端连接,所述压力传感器700的另一端及所述压差传感器的另一端均与ecpbs ecu相连;待测量的制动气室与危险品半挂运输车的ecpbs轴控模块相连,危险品半挂运输车的ecpbs轴控模块设置为接受ecpbs ecu的指令而进行调压作动使得待测量的制动气室内压力产生变化。
[0061]
当待测量的制动气室200内的压力收到ecpbs轴控模块100控制而发生改变时,流经层流阻尼管500后,流入等温容器300内气体压力变化稍晚,此时压差传感器600测得等温容器300和制动气室200之间的压差,压力传感器700测得等温容器300中的压力。因此,在误差允许范围内,可实时获取制动气室200内压力变化率的测量值。
[0062]
如图3所示为本发明提供的一种危险品半挂运输车制动气室压力变化率在线监控实现方案,危险品半挂运输车的各个制动气室均安装有图2所示的制动气室压力变化率在线监控装置,制动气室上制动压力变化率在线监控装置的传感器都将接入车载总线传输给ecpbs ecu,半挂车制动气室上的传感器要经由半挂车与牵引车的电控接口传输给ecpbs ecu,其信息将由ecpbs ecu进行处理,转化为制动压力变化率信息,这些信息将作为评价危险品半挂运输车ecpbs的重要参考指标。
[0063]
危险品半挂运输车ecpbs的轴控模块收到ecpbs ecu的控制信号开始对待测制动气室进行压力控制时,利用压力传感器测得所述等温容器内的压力,然后根据所述等温容器内的压力和所述等温容器与所述制动气室之间的压差得到所述待测量的制动气室内的压力变化率;
[0064]
制动气室上制动压力变化率在线监控装置的传感器都将接入车载总线,其信息将由ecpbs ecu经过处理,转化为制动压力变化率信息,这些信息将作为评价危险品半挂运输车ecpbs的重要参考指标,因此,危险品半挂运输车的所有车轮均会安装本发明的监测装置,半挂车制动气室上的传感器要经由半挂车与牵引车的电控接口传输给ecpbs ecu。
[0065]
需要指出,根据实施的需要,可将本技术中描述的各个步骤/部件拆分为更多步骤/部件,也可将两个或多个步骤/部件或者步骤/部件的部分操作组合成新的步骤/部件,以实现本发明的目的。
[0066]
对本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其他各种适应性的调整和改变,而所有的这些调整及改变都应该属于本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1