搬运车预警系统和搬运车预警方法与流程
1.本发明涉及运输设备技术领域,特别是涉及一种搬运车预警系统和搬运车预警方法。
背景技术:
2.搬运车即起搬运货物作用的物流搬运设备。其中,矿用铲板式搬运车是煤矿井下机电设备搬运及安装的必备运输设备。由于煤矿井下机电设备的形状和重量各异,采用铲板式搬运车进行物料搬运时,常因运输物料重心外悬过长而导致超载现象。超载现象通常表现为两种形式:1.铲装时超载,铲取货物时由于货物过重直接导致轮胎超载;2.运输过程中车辆在大角度转向时超载,由于前、后机架采用铰接转向,导致整车重心横向移动,表现为转向外侧轮附着力下降或悬空。超载不仅对车辆结构及液压系统产生破坏,同时使车辆行驶时稳定性变差,轮胎附着力下降,车辆转向失控,存在着很大的行车安全隐患。
3.目前搬运车多是采用压力传感器对运输物料进行检测,以此来判断是否超载。如中国专利cn201721205011.9公开了一种轨道搬运车自动化系统,其在搬运车厢体下方设置了压力传感器,在搬运车厢体超重时一压力传感器传出报警信号,然后报警灯进行报警。现有的搬运车预警系统存在如下问题:1.只能识别出货物的重量,无法识别货物的重心的外悬距离,导致超载现象频繁发生;2.只能在超载产生后提供报警,无法对允许的最大转弯角度等行车信息进行判断和提示,行车的安全隐患依然存在。
技术实现要素:
4.本发明的目的是提供一种搬运车预警系统和搬运车预警方法,以解决上述现有技术存在的问题,提升了搬运车的安全性能,有助于延长整个车辆系统的使用寿命。
5.为实现上述目的,本发明提供了如下方案:
6.本发明提供了一种搬运车预警系统,包括动臂、承载装置、第一伸缩装置、第二伸缩装置和安全控制装置,所述动臂的一端用于与前车体形成绕第一轴线的转动连接,所述承载装置与所述动臂的另一端形成绕第二轴线的转动连接且所述承载装置与所述第一伸缩装置的一端形成绕第三轴线的转动连接,所述第一伸缩装置的另一端与所述动臂形成绕第四轴线的转动连接,所述第二伸缩装置的输出端与所述动臂形成绕第五轴线的转动连接,所述第二伸缩装置的另一端用于与所述前车体形成绕第六轴线的转动连接,所述第一轴线、所述第二轴线、所述第三轴线、所述第四轴线、所述第五轴线和所述第六轴线相互平行,所述安全控制装置与所述第一伸缩装置和所述第二伸缩装置均连接,所述承载装置远离所述动臂的一端具有承载面,所述承载面能够承载货物,所述第一伸缩装置能够通过沿所述第一伸缩装置的长度方向伸缩来驱动所述承载装置绕所述第二轴线转动,所述第二伸缩装置能够通过沿所述第二伸缩装置的长度方向伸缩来驱动所述动臂绕所述第一轴线转动,所述承载面靠近所述动臂的边沿为第一边沿,所述安全控制装置能够通过检测所述第一伸缩装置的伸缩距离、所述第一伸缩装置伸缩前后的压力、所述第二伸缩装置的伸缩距
离和所述第二伸缩装置伸缩前后的压力来获得所述货物的重量和所述第一边沿到所述货物的重力的作用线的垂直距离。
7.优选的,还包括前车体、后车体、第三伸缩装置和第四伸缩装置,所述前车体和所述后车体形成绕第七轴线的转动连接,所述第三伸缩装置的输出端与所述前车体形成绕第八轴线的转动连接,所述第三伸缩装置的另一端与所述后车体形成绕第九轴线的转动连接,所述第四伸缩装置的输出端与所述前车体形成绕第十轴线的转动连接,所述第四伸缩装置的另一端与所述后车体形成绕第十一轴线的转动连接,所述第七轴线、所述第八轴线、所述第九轴线、所述第十轴线和所述第十一轴线相互平行,所述第七轴线与所述第一轴线相互垂直,所述第三伸缩装置和所述第四伸缩装置位于所述前车体的竖向对称面的两侧,所述第三伸缩装置和所述第四伸缩装置能够分别沿所述第三伸缩装置和所述第四伸缩装置的长度方向伸缩,且所述第三伸缩装置和所述第四伸缩装置能够通过驱动所述前车体绕所述第七轴线转动实现所述搬运车的实际转弯角度的改变。
8.优选的,所述安全控制装置包括位移检测装置和压力检测装置,所述位移检测装置和所述压力检测装置均为多个,所述第一伸缩装置、所述第二伸缩装置、所述第三伸缩装置和所述第四伸缩装置均设有至少一个所述位移传检测装置,所述第一伸缩装置和所述第二伸缩装置均设有至少一个所述压力检测装置,多个所述位移检测装置分别能够检测所述第一伸缩装置、所述第二伸缩装置、所述第三伸缩装置和所述第四伸缩装置的伸缩距离,多个所述压力检测装置分别能够检测所述第一伸缩装置伸缩前后所受到的沿所述第一伸缩装置伸缩方向的压力及所述第二伸缩装置伸缩前后所受到的沿所述第二伸缩装置伸缩方向的压力。
9.优选的,还包括报警器,所述安全控制装置还包括控制器,所述控制器与所述报警器、各所述位移检测装置和各所述压力检测装置均通讯连接,所述第一边沿到所述货物的重力的作用线的垂直距离为所述货物重心的外悬距离,所述控制器能够通过检测所述第一伸缩装置的伸缩距离、所述第一伸缩装置伸缩前后的压力、所述第二伸缩装置的伸缩距离和所述第二伸缩装置伸缩前后的压力来获得所述货物的重量和所述外悬距离,所述控制器能够通过所述货物的重量和所述外悬距离获得所述搬运车的最大安全转弯角度,所述控制器能够通过所述第三伸缩装置和所述第四伸缩装置的伸缩距离获得所述搬运车的实际转弯角度,所述控制器能够在所述货物的重量大于货物重量阈值时通过所述报警器进行超载报警,所述控制器能够在所述搬运车的实际转弯角度大于所述搬运车的最大安全转弯角度时通过所述报警器进行转弯角度超阈值报警。
10.优选的,所述前车体包括前桥、前车架、左前轮和右前轮,所述后车体包括后桥、后车架、摆动架、左后轮和右后轮,所述前桥与所述前车架固定连接,所述后桥与所述后车架固定连接,所述摆动架与所述后车架固定连接,所述左后轮和所述右后轮均与所述后桥转动连接,所述后车架与所述摆动架转动连接,所述前车架和所述后车架形成绕所述第七轴线的转动连接,所述后桥能够通过沿所述后车架的长度方向的中心线绕所述摆动架转动使所述左后轮和所述右后轮作用于所述地面的正压力相同,所述控制器能够获得所述左前轮或所述右前轮作用于所述地面的正压力为零时所对应的所述搬运车的实际转弯角度。
11.优选的,所述安全控制装置还包括显示器,所述显示器与所述控制器通讯连接,所述控制器能够将所述搬运车的最大安全转弯角度通过所述显示器进行显示,所述第一伸缩
装置、所述第二伸缩装置、所述第三伸缩装置和所述第四伸缩装置均为液压缸,各所述压力检测装置为压力传感器,各所述位移检测装置为位移传感器。
12.本发明还提供了一种基于上述搬运车预警系统的搬运车预警方法,包括:
13.步骤s1:所述安全控制装置检测所述第一伸缩装置的伸缩距离、所述第一伸缩装置伸缩前后的压力、所述第二伸缩装置的伸缩距离和所述第二伸缩装置伸缩前后的压力;
14.步骤s2:所述安全控制装置通过检测的所述第一伸缩装置的伸缩距离、所述第一伸缩装置伸缩前后的压力、所述第二伸缩装置的伸缩距离和所述第二伸缩装置伸缩前后的压力获得所述货物的重量及所述外悬距离。
15.优选的,所述步骤s1包括:通过多个位移检测装置分别检测所述第一伸缩装置和所述第二伸缩装置的伸缩距离,通过多个压力检测装置分别检测所述第一伸缩装置伸缩前后所受到的沿所述第一伸缩装置伸缩方向的压力及所述第二伸缩装置伸缩前后所受到的沿所述第二伸缩装置伸缩方向的压力;
16.所述步骤s2包括:
17.s21:控制器通过所述第一伸缩装置和所述第二伸缩装置的伸缩距离,获得所述第一轴线到所述第一伸缩装置上的所述压力检测装置检测的压力的作用线的垂直距离,并获得所述第二轴线到所述第二伸缩装置上的所述压力检测装置检测的压力的作用线的垂直距离;
18.s22:通过式(1)-(4)获得所述货物的重量及所述外悬距离:
19.g(a+x+b)+m1=f1×
l1;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
20.m1=f2×
l2;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
21.g(x+b)+m2=f1×
l1;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
22.m2=f2×
l2;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
23.其中,
24.g为所述货物的重量;
25.a为所述第二轴线到所述第一轴线所在的竖直面的垂直距离;
26.x为所述外悬距离;
27.b为所述第一边沿到所述第二轴线所在的平行于所述第一边沿的竖直面的垂直距离;
28.m1为所述承载装置、所述动臂、所述第一伸缩装置和所述第二伸缩装置的重力之和对所述动臂与所述前车体的连接点的力矩;
29.f1为所述搬运车载重时所述第二伸缩装置上的所述压力检测装置检测的压力;
30.l1为所述搬运车载重时所述第一轴线到所述第二伸缩装置上的所述压力检测装置检测的压力的作用线的垂直距离;
31.f2为空载时所述第二伸缩装置上的所述压力检测装置检测的压力;
32.l2为所述搬运车空载时所述第一轴线到所述第二伸缩装置上的所述压力检测装置检测的压力的作用线的垂直距离;
33.m2为所述承载装置、所述动臂、所述第一伸缩装置和所述第二伸缩装置的重力之和对所述动臂与所述承载装置的连接点的力矩;
34.f1为所述搬运车载重时所述第一伸缩装置上的所述压力检测装置检测的压力;
35.l1为所述搬运车载重时所述第二轴线到所述第一伸缩装置上的所述压力检测装置检测的压力的作用线的垂直距离;
36.f2为所述搬运车空载时所述第一伸缩装置上的所述压力检测装置检测的压力;
37.l2为所述搬运车空载时所述第二轴线到所述第一伸缩装置上的所述压力检测装置检测的压力的作用线的垂直距离。
38.优选的,还包括:
39.步骤s3:
40.所述控制器根据所述搬运车的货物的重量和所述外悬距离获得所述搬运车的最大安全转弯角度;
41.通过位移检测装置检测第三伸缩装置和第四伸缩装置的伸缩距离;
42.所述控制器通过所述第三伸缩装置和所述第四伸缩装置的伸缩距离获得所述搬运车的实际转弯角度。
43.优选的,其特征在于:
44.所述步骤s3包括:
45.使所述后桥能够沿所述后桥的长度方向的中心线转动;
46.通过式(5)-(15)获得所述地面作用于左前轮且垂直于所述地面的作用力和所述地面作用于右前轮且垂直于所述地面的作用力:
[0047]2×
f3+f4+f5=g+g1+g2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0048]
f4×
s4+f5×
s5=g
×
s+g1×
s1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0049]
f4×
k4+f5×
k5=g
×
k+g1×k1-g2×
k2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0050]
s=y1sinθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0051]
s1=y2sinθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0052]
s4=y3cos(π-θ-β)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0053]
s5=y4sin(θ-δ)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0054]
k=k0+y1cosθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0055]
k1=k0+y2cosθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0056]
k4=k0+y3sin(π-θ-β)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0057]
k5=k0+y4cos(θ-δ)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0058]
y1=a+b+x+y5ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0059]
其中,
[0060]
f3为所述地面作用于所述左后轮和所述右后轮且垂直于所述地面的作用力,
[0061]
f4为所述地面作用于所述左前轮且垂直于所述地面的作用力,
[0062]
f5为所述地面作用于所述右前轮且垂直于所述地面的作用力,
[0063]
g1为所述前车体的重力,
[0064]
g2为所述后车体的重力,
[0065]
s为所述货物的重力的作用线到所述后车体长度方向的中心线所在竖直平面的垂直距离,
[0066]
s1为所述前车体的重力的作用线到所述后车体长度方向的中心线所在竖直平面的垂直距离,
[0067]
s4为所述地面作用于所述左前轮且垂直于所述地面的作用力的作用线到所述后车体长度方向的中心线所在竖直平面的垂直距离,
[0068]
s5为所述地面作用于所述右前轮且垂直于所述地面的作用力的作用线到所述后车体长度方向的中心线所在竖直平面的垂直距离,
[0069]
k为所述货物的重力的作用线到所述后桥的轴线所在竖直平面的垂直距离,
[0070]
k1为所述前车体的重力的作用线到所述后桥的轴线所在竖直平面的垂直距离,
[0071]
k2为所述后车体的重力的作用线到所述后桥的轴线所在竖直平面的垂直距离,
[0072]
k4为所述地面作用于所述左前轮且垂直于所述地面的作用力的作用线到所述后桥的轴线所在竖直平面的垂直距离,
[0073]
k5为所述地面作用于所述右前轮且垂直于所述地面的作用力的作用线到所述后桥的轴线所在竖直平面的垂直距离;
[0074]
θ为所述搬运车的最大安全转弯角度,
[0075]
y1为所述货物的重力的作用线到所述第七轴线之间的垂直距离,
[0076]
y2为所述前车架的重力的作用线到所述第七轴线之间的垂直距离,
[0077]
y3为所述地面作用于所述左前轮且垂直于所述地面的作用力的作用线到所述第七轴线之间的垂直距离,
[0078]
β为y3所在直线与所述前车架长度方向的中心线所在竖直平面之间的夹角,
[0079]
y4为所述地面作用于所述右前轮且垂直于所述地面的作用力的作用线到所述第七轴线之间的垂直距离,
[0080]
δ为y4所在直线与所述后车架长度方向的中心线所在竖直平面之间的夹角,
[0081]
k0为所述第七轴线与所述后桥的轴线所在竖直平面之间的垂直距离;
[0082]
y5为所述第七轴线到所述第一轴线所在的平行于所述第一边沿的竖直面的垂直距离;
[0083]
通过所述地面作用于所述左前轮或所述右前轮且垂直于所述地面的作用力,获得所述搬运车的最大安全转弯角度,具体为:当所述搬运车向左侧转弯时,所述地面作用于所述右前轮且垂直于所述地面的作用力为零时所对应的所述搬运车的实际转弯角度为所述搬运车的最大安全转弯角度;当所述搬运车向右侧转弯时,所述地面作用于所述左前轮且垂直于所述地面的作用力为零时所对应的所述搬运车的实际转弯角度为所述搬运车的最大安全转弯角度;
[0084]
还包括:
[0085]
显示器将所述控制器获得的所述搬运车的最大安全转弯角度进行显示;
[0086]
控制器将所述搬运车的货物重量和所述搬运车的实际转弯角度分别与所述搬运车的货物阈值和所述搬运车的最大安全转弯角度进行比对,所述控制器在所述货物的重量大于货物重量阈值时通过所述报警器进行超载报警,所述控制器在所述搬运车的实际转弯角度大于所述搬运车的最大安全转弯角度时通过所述报警器进行转弯角度超阈值报警。
[0087]
本发明相对于现有技术取得了以下技术效果:
[0088]
本发明提供的搬运车预警系统和搬运车预警方法,通过安全控制装置获得货物的重量和第一边沿到货物的重力的作用线的垂直距离(货物重心的外悬距离),驾驶者能够根据货物的重量和货物重心的外悬距离,调整搬运车转弯角度,即重量越大、外悬距离越大,
搬运车的实际转弯角度应越小,避免搬运车超载而导致转向外侧轮附着力下降或悬空。提升了搬运车的安全性能,有助于延长整个车辆系统的使用寿命。
附图说明
[0089]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0090]
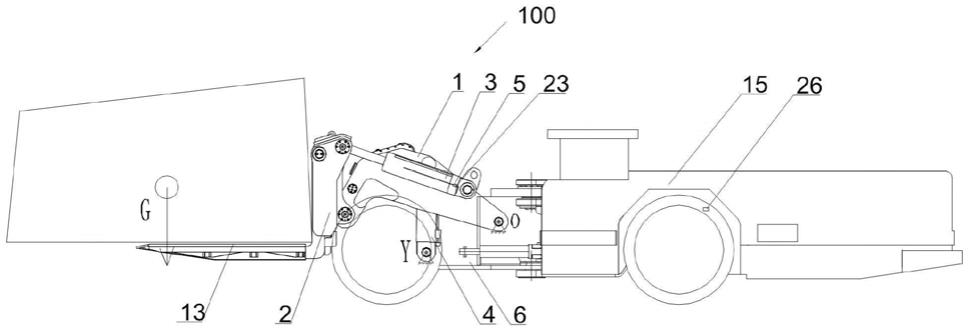
图1为本实施例1中的搬运车预警系统的结构示意图;
[0091]
图2为本实施例1中的动臂、承载装置、第一伸缩装置和第二伸缩装置的结构示意图;
[0092]
图3为本实施例1中的搬运车预警系统的俯视图(直行状态);
[0093]
图4为压力检测装置的安装示意图;
[0094]
图5为安全控制装置的结构示意图;
[0095]
图6为本实施例1中的搬运车预警系统的俯视图(转弯状态);
[0096]
图7为图6中e的结构示意图;
[0097]
图中:100-搬运车预警系统,1-动臂,2-承载装置,3-第一伸缩装置,4-第二伸缩装置,5-安全控制装置,6-前车体,7-第一轴线,8-第二轴线,9-第三轴线,10-第四轴线,11-第五轴线,12-第六轴线,13-承载面,14-第一边沿,15-后车体,16-第三伸缩装置,17-第四伸缩装置,18-第七轴线,19-第八轴线,20-第九轴线,21-第十轴线,22-第十一轴线,23-位移检测装置,x-外悬距离,24-压力检测装置,25-控制器,26-显示器,27-报警器,28-摆动架,29-前桥,30-前车架,31-左前轮,32-右前轮,33-后桥,34-后车架,35-左后轮,36-右后轮,θ-搬运车的最大安全转弯角度,β-y3所在直线与所述前车架长度方向的中心线之间的夹角,δ-y4所在直线与所述后车架长度方向的中心线之间的夹角。
具体实施方式
[0098]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0099]
本发明的目的是提供一种搬运车预警系统和搬运车预警方法,以解决上述现有技术存在的问题,提升了搬运车的安全性能,有助于延长整个车辆系统的使用寿命。
[0100]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0101]
实施例1
[0102]
如图1-3所示,本实施例提供一种搬运车预警系统100,包括动臂1、承载装置2、第一伸缩装置3、第二伸缩装置4和安全控制装置5,动臂1的一端用于与前车体6形成绕第一轴线7的转动连接,承载装置2与动臂1的另一端形成绕第二轴线8的转动连接且承载装置2与第一伸缩装置3的一端形成绕第三轴线9的转动连接,第一伸缩装置3的另一端与动臂1形成
绕第四轴线10的转动连接,第二伸缩装置4的输出端与动臂1形成绕第五轴线11的转动连接,第二伸缩装置4的另一端用于与前车体6形成绕第六轴线12的转动连接,第一轴线7、第二轴线8、第三轴线9、第四轴线10、第五轴线11和第六轴线12相互平行,安全控制装置5与第一伸缩装置3和第二伸缩装置4均连接,承载装置2远离动臂1的一端具有承载面13,承载面13能够承载货物,第一伸缩装置3能够通过沿第一伸缩装置3的长度方向伸缩来驱动承载装置2形成绕第二轴线8转动,第二伸缩装置4能够通过沿第二伸缩装置4的长度方向伸缩来驱动动臂1形成绕第一轴线7转动,承载面13靠近动臂1的边沿为第一边沿14,安全控制装置5能够通过检测第一伸缩装置3的伸缩距离、第一伸缩装置3伸缩前后的压力、第二伸缩装置4的伸缩距离和第二伸缩装置4伸缩前后的压力来获得货物的重量和第一边沿14到货物的重力的作用线的垂直距离,安全控制装置5检测的第一伸缩装置3伸缩前的压力为安全控制装置5检测到的第一伸缩装置3未承载货物时的压力,安全控制装置5检测的第一伸缩装置3伸缩后的压力为安全控制装置5检测到的第一伸缩装置3承载货物时的压力;安全控制装置5检测的第二伸缩装置4伸缩前的压力为安全控制装置5检测到的第二伸缩装置4未承载货物时的压力,安全控制装置5检测的第二伸缩装置4伸缩后的压力为安全控制装置5检测到的第二伸缩装置4承载货物时的压力。通过安全控制装置5获得货物的重量和第一边沿14到货物的重力的作用线的垂直距离(货物重心的外悬距离x),驾驶者能够根据货物的重量和货物重心的外悬距离x,调整搬运车的实际转弯角度,即重量越大、外悬距离x越大,搬运车的实际转弯角度应越小,避免搬运车超载而导致转向外侧轮附着力下降或悬空。提升了搬运车的安全性能,有助于延长整个车辆系统的使用寿命。优选的,承载装置2包括联接块和铲板,联接块的一端与铲板固定连接,联接块的另一端的上端与第一伸缩装置3形成绕第三轴线9的转动连接,联接块的另一端的下端与动臂1形成绕第二轴线8的转动连接,铲板的上表面为承载面13。
[0103]
本实施例提供的搬运车预警系统100还包括前车体6、后车体15、第三伸缩装置16和第四伸缩装置17,前车体6和后车体15形成绕第七轴线18的转动连接,第三伸缩装置16的输出端与前车体6形成绕第八轴线19的转动连接,第三伸缩装置16的另一端与后车体15形成绕第九轴线20的转动连接,第四伸缩装置17的输出端与前车体6形成绕第十轴线21的转动连接,第四伸缩装置17的另一端与后车体15形成绕第十一轴线22的转动连接,第七轴线18、第八轴线19、第九轴线20、第十轴线21和第十一轴线22相互平行,第七轴线18与第一轴线7相互垂直,第三伸缩装置16和第四伸缩装置17位于前车体6的竖向对称面的两侧,竖向对称面平行于前车体6的长度方向,第三伸缩装置16和第四伸缩装置17能够分别沿第三伸缩装置16和第四伸缩装置17的长度方向伸缩,且第三伸缩装置16和第四伸缩装置17能够通过驱动前车体6形成绕第七轴线18转动实现所述搬运车的实际转弯角度的改变。
[0104]
安全控制装置5包括位移检测装置23和压力检测装置24,位移检测装置23和压力检测装置24均为多个,第一伸缩装置3、第二伸缩装置4、第三伸缩装置16和第四伸缩装置17均设有至少一个位移传检测装置,优选的,第一伸缩装置3、第二伸缩装置4、第三伸缩装置16和第四伸缩装置17均设有一个位移传检测装置,第一伸缩装置3和第二伸缩装置4均设有至少一个压力检测装置24,优选的,第一伸缩装置3和第二伸缩装置4均设有一个压力检测装置24,多个位移检测装置23分别能够检测第一伸缩装置3、第二伸缩装置4、第三伸缩装置16和第四伸缩装置17的伸缩距离,多个压力检测装置24分别能够检测第一伸缩装置3伸缩
前后所受到的沿第一伸缩装置3伸缩方向的压力及第二伸缩装置4伸缩前后所受到的沿第二伸缩装置4伸缩方向的压力。
[0105]
本实施例提供的搬运车预警系统100还包括报警器27,安全控制装置5还包括控制器25,控制器25与报警器27、各位移检测装置23和各压力检测装置24均通讯连接,第一边沿14到货物的重力的作用线的垂直距离为货物重心的外悬距离x,控制器25能够通过通过检测第一伸缩装置3的伸缩距离、第一伸缩装置3伸缩前后的压力、第二伸缩装置4的伸缩距离和第二伸缩装置4伸缩前后的压力来获得货物的重量和外悬距离x,控制器25能够通过货物的重量和外悬距离x获得搬运车的最大安全转弯角度θ,控制器25能够通过第三伸缩装置16和第四伸缩装置17的伸缩距离获得搬运车的实际转弯角度,控制器25能够在货物的重量大于货物重量阈值时通过报警器27进行超载报警,控制器25能够在搬运车的实际转弯角度大于搬运车的最大安全转弯角度θ时通过报警器27进行转弯角度超阈值报警。优选的,控制器25内部存储有货物重量和货物重心外悬距离x与最大安全转弯角度θ的对照表,控制器25将获得的实际转弯角度分别与内部存储的最大安全转弯角度θ的对照表进行比对,当搬运车的实际转弯角度大于搬运车的最大安全转弯角度θ时通过报警器27进行转弯角度超阈值报警。能够有效避免铲装时由于货物过重或实际转弯角度过大等而导致转向外侧轮悬空,提升了搬运车的安全性能,有助于延长及整个车辆系统的使用寿命。
[0106]
本实施例提供的搬运车预警系统100中前车体包括前桥29、前车架30、左前轮31和右前轮32,后车体包括后桥33、后车架34、摆动架、左后轮35和右后轮36,前桥29与前车架30固定连接,左前轮31和右前轮32均与前桥29转动连接,后桥33与后车架34固定连接,左后轮35和右后轮36均与后桥33转动连接,后车架34与摆动架转动连接,前车架30和后车架34形成绕第七轴线的转动连接,后桥33能够通过沿后车架34的长度方向的中心线绕摆动架转动使左后轮35和右后轮36作用于地面的正压力相同。优选的,后桥33为摆动式后桥33,摆动式后桥33能够绕摆动架摆动,确保在地面不平的工作环境下,四个车轮均能紧贴地面。控制器25能够获得左前轮31或右前轮32作用于地面的正压力为零时所对应的搬运车的实际转弯角度,此时的搬运车的实际转弯角度即为搬运车的最大安全转弯角度θ。安全控制装置5还包括显示器26,显示器26与控制器25通讯连接,控制器25能够将搬运车的最大安全转弯角度θ通过显示器26进行显示。操作人员能够根据搬运车的最大安全转弯角度θ调整实际转弯角度,避免超载现象的产生。
[0107]
第一伸缩装置3、第二伸缩装置4、第三伸缩装置16和第四伸缩装置17均为液压缸,各压力检测装置24为压力传感器,各位移检测装置23为位移传感器。
[0108]
实施例2
[0109]
如图1-3所示,本实施例2提供了一种基于实施例1的搬运车预警系统100的搬运车预警方法,包括:
[0110]
步骤s1:安全控制装置5检测第一伸缩装置3的伸缩距离、第一伸缩装置3伸缩前后的压力、第二伸缩装置4的伸缩距离和第二伸缩装置4伸缩前后的压力;
[0111]
步骤s2:安全控制装置5通过检测的第一伸缩装置3的伸缩距离、第一伸缩装置3伸缩前后的压力、第二伸缩装置4的伸缩距离和第二伸缩装置4伸缩前后的压力获得货物的重量及外悬距离x。
[0112]
步骤s1包括:通过多个位移检测装置23分别检测第一伸缩装置3和第二伸缩装置4
的伸缩距离,通过多个压力检测装置24分别检测第一伸缩装置3伸缩前后所受到的沿第一伸缩装置3伸缩方向的压力及第二伸缩装置4伸缩前后所受到的沿第二伸缩装置4伸缩方向的压力;
[0113]
步骤s2包括:
[0114]
s21控制器25通过第一伸缩装置3和第二伸缩装置4的伸缩距离,获得第一轴线7到第一伸缩装置3上的压力检测装置24检测的压力的作用线的垂直距离,并获得第二轴线8到第二伸缩装置4上的压力检测装置24检测的压力的作用线的垂直距离;
[0115]
s22通过公式(1)-(4)获得货物的重量及外悬距离x:
[0116]
(1)g1(a+x+b)+m1=f1×
l1;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0117]
(2)m1=f2×
l2;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0118]
(3)g1(x+b)+m2=f1×
l1;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0119]
(4)m2=f2×
l2;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0120]
其中,
[0121]
g1为货物的重量;
[0122]
a为第二轴线8到第一轴线7所在的竖直面的垂直距离;
[0123]
x为外悬距离;
[0124]
b为第一边沿14到第二轴线8所在的平行于第一边沿14的竖直面的垂直距离;
[0125]
m1为承载装置2、动臂1、第一伸缩装置3和第二伸缩装置4的重力之和对动臂1与前车体6的连接点的力矩;其中,动臂1与前车体6的连接点位于第一轴线7上;
[0126]
f1为搬运车载重时第二伸缩装置4上的压力检测装置24检测的压力;
[0127]
l1为搬运车载重时第一轴线7到第二伸缩装置4上的压力检测装置24检测的压力的作用线的垂直距离;
[0128]
f2为空载时第二伸缩装置4上的压力检测装置24检测的压力;
[0129]
l2为搬运车空载时第一轴线7到第二伸缩装置4上的压力检测装置24检测的压力的作用线的垂直距离;
[0130]
m2为承载装置2、动臂1、第一伸缩装置3和第二伸缩装置4的重力之和对动臂1与承载装置2的连接点的力矩;其中,动臂1与承载装置2的连接点位于第二轴线8上;
[0131]
f1为搬运车载重时第一伸缩装置3上的压力检测装置24检测的压力;
[0132]
l1为搬运车载重时第二轴线8到第一伸缩装置3上的压力检测装置24检测的压力的作用线的垂直距离;
[0133]
f2为搬运车空载时第一伸缩装置3上的压力检测装置24检测的压力;
[0134]
l2为搬运车空载时第二轴线8到第一伸缩装置3上的压力检测装置24检测的压力的作用线的垂直距离;
[0135]
优选的,动臂1与前车体6在第一轴线7处的连接点为o点,第一轴线7到第一伸缩装置3上的压力检测装置24检测的压力的作用线的垂直距离为f1相对于o点的力臂;动臂1与装载装置在第二轴线8处的连接点为y点,第二轴线8到第二伸缩装置4上的压力检测装置24检测的压力的作用线的垂直距离为f2相对于y点的力臂。其中,第二轴线8与第三轴线9之间的距离和第三轴线9与第四轴线10之间的距离是固定的,第一伸缩装置3和第二伸缩装置4的实时长度是可以借助位移检测装置23检测的数值获得的,控制器25利用三角函数关系通
过计算能够得到f1相对于o点的力臂和f2相对于y点的力臂;或者控制器25内存储有第一伸缩装置3的伸缩位移与f1相对于o点的力臂的对照表和第二伸缩装置4的伸缩位移与f2相对于y点的力臂的对照表,通过第一伸缩装置3测得的伸缩位移和第二伸缩装置4测得的伸缩位移与对照表进行比对,获得f1相对于o点的力臂和f2相对于y点的力臂。
[0136]
控制器25根据搬运车的货物的重量和外悬距离x,获得搬运车的最大安全转弯角度θ;
[0137]
通过位移检测装置23检测第三伸缩装置16和第四伸缩装置17的伸缩距离;
[0138]
控制器25通过第三伸缩装置16和第四伸缩装置17的伸缩距离获得搬运车的实际转弯角度。优选的,控制器25通过第三伸缩装置16和第四伸缩装置17的伸缩距离获得第三伸缩装置16和第四伸缩装置17的实时长度,再根据第三伸缩装置16和第四伸缩装置17的安装位置关系,利用三角函数关系计算得到搬运车的实际转弯角度。或者控制器25内存储有第三伸缩装置16和第四伸缩装置17的伸缩距离与实际转弯角度的对照表,控制器25能够通过对照表获得搬运车的实际转弯角度。
[0139]
使后桥33能够沿后桥33的长度方向的中心线转动;优选的,后桥33为摆动式后桥33。此时,根据杠杆原理对后桥33进行受力分析,可以得到左后轮35和右后轮36作用于地面的正压力相同;
[0140]
通过式(5)-(15)获得地面作用于左前轮31且垂直于地面的作用力和地面作用于右前轮32且垂直于地面的作用力:
[0141]2×
f3+f4+f5=g+g1+g2;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0142]
f4×
s4+f5×
s5=g
×
s+g1×
s1;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0143]
f4×
k4+f5×
k5=g
×
k+g1×k1-g2×
k2;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0144]
s=y1sinθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0145]
s1=y2sinθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0146]
s4=y3cos(π-θ-β)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0147]
s5=y4sin(θ-δ)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0148]
k=k0+y1cosθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0149]
k1=k0+y2cosθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0150]
k4=k0+y3sin(π-θ-β)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0151]
k5=k0+y4cos(θ-δ)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0152]
y1=a+b+x+y5ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0153]
其中,
[0154]
f3为地面作用于左后轮35和右后轮36且垂直于地面的作用力,
[0155]
f4为地面作用于左前轮31且垂直于地面的作用力,
[0156]
f5为地面作用于右前轮32且垂直于地面的作用力,
[0157]
g1为前车体6的重力,
[0158]
g2为后车体15的重力,
[0159]
s为货物的重力的作用线到后车体15长度方向的中心线所在竖直平面的垂直距离,
[0160]
s1为前车体6的重力的作用线到后车体15长度方向的中心线所在竖直平面的垂直
距离,
[0161]
s4为地面作用于左前轮31且垂直于地面的作用力的作用线到后车体15长度方向的中心线所在竖直平面的垂直距离,
[0162]
s5为地面作用于右前轮32且垂直于地面的作用力的作用线到后车体15长度方向的中心线所在竖直平面的垂直距离,
[0163]
k为货物的重力的作用线到后桥33的轴线所在竖直平面的垂直距离,
[0164]
k1为前车体6的重力的作用线到后桥33的轴线所在竖直平面的垂直距离,
[0165]
k2为后车体15的重力的作用线到后桥33的轴线所在竖直平面的垂直距离,
[0166]
k4为地面作用于左前轮31且垂直于地面的作用力的作用线到后桥33的轴线所在竖直平面的垂直距离,
[0167]
k5为地面作用于右前轮32且垂直于地面的作用力的作用线到后桥33的轴线所在竖直平面的垂直距离;
[0168]
θ为搬运车的最大安全转弯角度,
[0169]
y1为货物的重力的作用线到第七轴线18之间的垂直距离,
[0170]
y2为前车架30的重力的作用线到第七轴线18之间的垂直距离,
[0171]
y3为地面作用于左前轮31且垂直于地面的作用力的作用线到第七轴线18之间的垂直距离,
[0172]
β为y3所在直线与前车架30长度方向的中心线所在竖直平面之间的夹角,
[0173]
y4为地面作用于右前轮32且垂直于地面的作用力的作用线到第七轴线18之间的垂直距离,
[0174]
δ为y4所在直线与后车架34长度方向的中心线所在竖直平面之间的夹角,
[0175]
k0为第七轴线18与后桥33的轴线所在竖直平面之间的垂直距离;
[0176]
y5为第七轴线18到第一轴线7所在的平行于第一边沿14的竖直面的垂直距离;
[0177]
上述公式(5)-(15),除了f3、f4、f5和θ外的其他参数,均可以根据搬运车的尺寸关系及重量信息获得。
[0178]
通过地面作用于左前轮31且垂直于地面的作用力或地面作用于右前轮32且垂直于地面的作用力,获得搬运车的最大安全转弯角度θ,具体为:当搬运车向左侧转弯时,地面作用于右前轮32且垂直于地面的作用力为零时所对应的搬运车的实际转弯角度为搬运车的最大安全转弯角度θ;当搬运车向右侧转弯时,地面作用于左前轮31且垂直于地面的作用力为零时所对应的搬运车的实际转弯角度为搬运车的最大安全转弯角度θ;原因为当搬运车转向时,转向内侧前轮的载荷逐步增大,转向外侧前轮的载荷逐步减小,转向外侧前轮的载荷减小至0时,即f4或f5等于0时,对应侧的轮胎完全失去附着力,此时,车辆牵引性能及转向操控性下降,车辆行车安全风险增大。搬运车的实际转弯角度应小于搬运车的最大安全转弯角度θ。
[0179]
上述为搬运车在水平路面行驶时搬运车的最大安全转弯角度θ的计算方法,当路面具有纵向(平行于搬运车的长度方向)倾角及横向(垂直于搬运车的长度方向)倾角时,应当对上述计算数值进行进一步的修正。可选的纵向修正方式为:当搬运车在具有纵向倾角的路面行驶时,位于坡道上方的车桥(车轮)的实际承载的重量向位于坡道下方的车桥(车轮)转移,对应的,相对于搬运车在水平路面上行驶,位于坡道上方的车轮作用于地面的正
压力会有一定量的减小,位于坡道下方的车轮作用于地面的正压力会有一定量的增加,其中车轮对应的正压力的变化量与坡道纵向倾角正相关。可选的横向修正方式:当车辆在具有横向倾角的路面时,位于坡道上方一侧的前车轮实际承载的重量向位于坡道下方的车轮转移,对应的,相对于搬运车在水平路面上行驶,位于坡道上方的车轮作用于地面的正压力会有一定量的减小,位于坡道下方的车轮作用于地面的正压力会有一定量的增加,其中车轮对应的正压力的变化量与坡道横向倾角正相关。优选的,可以通过实验标定的方式获得车轮对应的正压力的变化量与坡道纵倾角之间的对应关系,进而获得路面具有纵向倾角及横向倾角时搬运车的最大安全转弯角度θ。本发明不局限于通过实验标定的方式获得路面具有纵向倾角及横向倾角时搬运车的最大安全转弯角度θ,还可以通过动力学仿真分析等其他分析方式获得路面具有纵向倾角及横向倾角时搬运车的最大安全转弯角度θ。
[0180]
显示器26将控制器25获得的搬运车的最大安全转弯角度θ进行显示;
[0181]
控制器25将搬运车的货物重量和搬运车的实际转弯角度分别与搬运车的货物阈值和搬运车的最大安全转弯角度θ进行比对,控制器25在货物的重量大于货物重量阈值时通过报警器27进行超载报警,控制器25在搬运车的实际转弯角度大于搬运车的最大安全转弯角度θ时通过报警器27进行转弯角度超阈值报警。优选的,报警器27可以对超载或转弯角度超阈值某一项进行单独报警,也可以对两项进行同时报警。优选为声音报警。
[0182]
本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1