避撞装置的制作方法
1.本发明涉及能够执行避免与立体物的碰撞或者减轻由碰撞导致的冲击的避撞控制的避撞装置。
背景技术:
2.以往以来已知一种避撞装置(例如参照专利文献1),其在车辆的前方检测到车辆有可能会碰撞的立体物的情况下,进行避免与该立体物的碰撞或者减轻由碰撞导致的冲击的控制(避撞控制)。避撞装置分别运算车辆的轨迹和立体物的轨迹,基于这些轨迹判定车辆是否有可能与立体物碰撞。
3.此外,避撞控制是执行自动地对车辆提供制动力的自动制动控制和自动地对车辆的转向轮的转向角进行变更的自动操舵控制中的至少一方的控制。以下,为了与其他车辆进行区别,将搭载有避撞装置的车辆称为“自身车辆”。
4.现有技术文献
5.专利文献1:日本特开2010-079424号公报
技术实现要素:
6.根据专利文献1的避撞装置(以下称为“现有装置”。),有可能在行驶期间中自身车辆的驾驶员向右转(顺时针方向)操作了方向盘的情况下执行不必要的避撞控制。例如,考虑驾驶员从当前车道(自身车辆当前位于的车道)向右侧相邻车道(与当前车道在其右侧相邻的车道)进行车道变更的情况。在该情况下,驾驶员首先向右转操作方向盘,当自身车辆开始进入右侧相邻车道时,向左转(逆时针方向)操作方向盘,由此,进行车道变更。此外,“向右转(或者左转)操作方向盘”意味着通过该操作而自身车辆的转向轮向右方向(或者左方向)转向。
7.存在在行驶期间中自身车辆会在交叉路口以外的位置右转以横穿对向车道的情况(例如自身车辆进入位于对向车道的右侧的设施的停车场的情况)。当在这样的情况下在对向车道上行驶的其他车辆接近过来时,现有装置基于自身车辆的轨迹和该其他车辆的轨迹来判定有无自身车辆与其他车辆碰撞的可能性,在判定为了具有可能性的情况下执行避撞控制。
8.当驾驶员为了进行车道变更而向右转操作方向盘时,自身车辆的轨迹会暂时性地与右转时的轨迹一致。因此,当在驾驶员向右转操作方向盘的期间中在对向车道上行驶的其他车辆接近过来时,现有装置有时会根据自身车辆的轨迹和该其他车辆的轨迹而判定为自身车辆有可能与其他车辆碰撞。在该情况下,尽管因驾驶员之后会向左转操作方向盘而实际上与该其他车辆碰撞的可能性极低,但却执行了避撞控制,因此,成为不必要的工作。
9.此外,上述的例子是应用于规定了左侧通行的国家(采用了对向车道相对于行驶车道而位于右侧的车道布局的国家)的例子。在规定了右侧通行的国家(采用了对向车道相对于行驶车道而位于左侧的车道布局的国家)中,上述的例子可以通过使左和右相反而进
行表达替换来进行说明。
10.本发明是为了应对上述的问题而完成的。即,本发明的目的之一在于提供一种能够降低在行驶期间中自身车辆的驾驶员向右转操作了方向盘的情况下执行不必要的避撞控制的可能性的避撞装置。
11.本发明涉及的第一个避撞装置(以下称为“第1发明装置”。)具备:
12.目标物信息取得装置(20),其取得关于存在于自身车辆的前方的立体物和向所述自身车辆的前方延伸的规定车道的区划线的信息来作为目标物信息;
13.操舵输入值取得装置(21),其取得作为基于操舵操作的输入值的操舵输入值(θs),所述操舵操作是由所述自身车辆的驾驶员进行的方向盘的操作;以及
14.控制单元(10),其至少基于所述目标物信息分别运算所述自身车辆的轨迹和立体物的轨迹,当满足在基于这些轨迹判定为所述自身车辆有可能与所述立体物碰撞的情况下成立的碰撞条件时,执行自动地对所述自身车辆提供制动力的自动制动控制和自动地对所述自身车辆的转向轮的转向角进行变更的自动操舵控制中的至少一方来作为避撞控制。
15.当将所述驾驶员进行了右转或者左转的操舵操作时的操舵输入值(θs)分别规定为正值或者负值时,
16.所述控制单元(10)构成为:在存在与自身车辆当前位于的当前车道在其右侧相邻的车道即右侧相邻车道(步骤420:是)、在所述右侧相邻车道上行驶的其他车辆的行进方向与自身车辆的行进方向相同时成立的同方向条件成立(步骤430:是)、且所述操舵输入值(θs)为具有正值的预定的操舵阈值(θsth)以上(步骤440:是)的第1情况下,即使所述碰撞条件成立(步骤450:是),也不执行所述避撞控制,或者对在所述碰撞条件中使用的阈值进行变更以使得所述碰撞条件难以成立。
17.第1情况例如是自身车辆从当前车道向右侧相邻车道开始了车道变更的情况、或者暂时停在了当前车道的左端的自身车辆开始了向右侧相邻车道的合流的情况。在这些情况下,驾驶员虽然向右转进行操舵操作,但自身车辆进入对向车道的可能性极低。第1发明装置构成为:在第1情况下,即使碰撞条件成立,也不执行避撞控制,或者对在碰撞条件中使用的阈值进行变更以使得该条件难以成立。因此,根据第1发明装置的构成,能够降低在行驶期间中驾驶员向右转进行了操舵操作的情况下执行不必要的避撞控制的可能性。此外,根据路侧带的宽度,有时自身车辆在暂时停车时其左端会从当前车道超出而位于路侧带(例如路侧带超过0.75m的情况)。在本说明书中,为了便于说明,在这样的情况下也视为自身车辆位于当前车道。
18.在本发明的一个侧面中,
19.所述目标物信息取得装置(20)进一步取得关于存在于自身车辆的后方的立体物的信息来作为所述目标物信息,
20.所述控制单元(10)构成为:在基于所述目标物信息判定为在所述第1情况下关于存在于所述右侧相邻车道的其他车辆而所述碰撞条件成立时(步骤450:是),执行自动地对所述自身车辆的转向轮的转向角进行变更以使得所述自身车辆不从所述当前车道向所述右侧相邻车道脱离的紧急车道维持控制(步骤460)。
21.根据本发明的一个侧面,能够安全地进行向右侧相邻车道的车道变更或者合流。
22.在本发明的一个侧面中,
23.当将中心线向右方向或者左方向弯曲时的所述中心线的曲率(cc)分别规定为正值或者负值时,
24.所述控制单元(10)构成为:
25.在存在所述右侧相邻车道(步骤420:是)、所述同方向条件不成立(步骤430:否)、且所述操舵输入值(θs)为所述操舵阈值(θsth)以上(步骤600:是)的第2情况下,运算作为所述当前车道与所述右侧相邻车道之间的区划线的中心线的曲率(cc),
26.在所述中心线的曲率为具有正值的预定的曲率阈值以上的情况下成立的曲率条件成立时(步骤610:是),基于所述中心线的曲率(cc)来运算在所述自身车辆的前方在所述右侧相邻车道上行驶的其他车辆的轨迹(步骤620)。
27.此外,“中心线向右方向或者左方向弯曲”意味着中心线相对于自身车辆的当前的行进方向而向右方向或者左方向弯曲。
28.在第2情况下同方向条件不成立,因此,右侧相邻车道为对向车道。因此,“在第2情况下曲率条件成立时”例如是指自身车辆在向右方向弯曲的当前车道上一边由驾驶员向右转进行操舵操作一边行驶的时候。在该情况下,虽然驾驶员向右转进行操舵操作,但自身车辆进入对向车道的可能性极低。第1发明装置构成为:“在第2情况下曲率条件成立时”,基于中心线的曲率来运算在自身车辆的前方在右侧相邻车道上行驶的其他车辆(即正在接近自身车辆的对向车辆)的轨迹。因此,与基于“自身车辆的轨迹”和“不考虑中心线的曲率而运算出的其他车辆的轨迹”来判定碰撞条件是否成立的构成相比,能够提高碰撞条件的判定精度。因此,根据该构成,能够降低在行驶期间中驾驶员向右转进行了操舵操作的情况下执行不必要的避撞控制的可能性。
29.在本发明的一个侧面中,
30.所述控制单元(10)构成为:
31.在存在所述右侧相邻车道(步骤420:是)、所述同方向条件不成立(步骤430:否)、且所述操舵输入值(θs)为所述操舵阈值(θsth)以上(步骤600:是)的第2情况下,运算作为所述当前车道与所述右侧相邻车道之间的区划线的中心线的曲率(cc),
32.基于所述中心线的曲率(cc)来运算在所述自身车辆的前方在所述右侧相邻车道上行驶的其他车辆的轨迹。
33.第2情况例如是自身车辆在向右方向弯曲的当前车道上一边由驾驶员向右转进行操舵操作一边行驶的时候、或者自身车辆要在直线状或者向左方向弯曲的当前车道上右转的时候。第1发明装置构成为:在第2情况下,基于中心线的曲率来运算其他车辆(正在接近自身车辆的对向车辆)的轨迹。因此,与基于“自身车辆的轨迹”和“不考虑中心线的曲率而运算出的其他车辆的轨迹”来判定碰撞条件是否成立的构成相比,能够提高碰撞条件的判定精度。因此,根据该构成,能够降低在行驶期间中驾驶员向右转进行了操舵操作的情况下执行不必要的避撞控制的可能性。
34.在本发明的一个侧面中,
35.所述控制单元(10)构成为:运算所述其他车辆的所述轨迹以使其曲率与所述中心线的曲率(cc)一致。
36.本发明涉及的第2个避撞装置(以下称为“第2发明装置”。)具备:
37.目标物信息取得装置,其取得关于存在于自身车辆的前方的立体物和向所述自身
车辆的前方延伸的规定车道的区划线的信息来作为目标物信息;
38.操舵输入值取得装置,其取得作为基于操舵操作的输入值的操舵输入值,所述操舵操作是所述自身车辆的驾驶员的方向盘的操作;以及
39.控制单元,其至少基于所述目标物信息分别运算所述自身车辆的轨迹和立体物的轨迹,当满足在基于这些轨迹判定为所述自身车辆有可能与所述立体物碰撞的情况下成立的碰撞条件时,执行自动地对所述自身车辆提供制动力的自动制动控制和自动地对所述自身车辆的转向轮的转向角进行变更的自动操舵控制中的至少一方来作为避撞控制。
40.当将所述驾驶员进行了左转或者右转的操舵操作时的操舵输入值分别规定为正值或者负值时,
41.所述控制单元构成为:在存在与自身车辆当前位于的当前车道在其左侧相邻的车道即左侧相邻车道、在所述左侧相邻车道上行驶的其他车辆的行进方向与自身车辆的行进方向相同的情况下成立的同方向条件成立、且所述操舵输入值为具有正值的预定的操舵阈值以上的第3情况下,即使所述碰撞条件成立,也不执行所述避撞控制,或者对在所述碰撞条件中使用的阈值进行变更以使得所述碰撞条件难以成立。
42.在本发明的一个侧面中,
43.所述目标物信息取得装置进一步取得关于存在于自身车辆的后方的立体物的信息来作为所述目标物信息,
44.所述控制单元构成为:在基于所述目标物信息判定为在所述第3情况上关于存在于所述左侧相邻车道的其他车辆而所述碰撞条件成立时,执行自动地对所述自身车辆的转向轮的转向角进行变更以使得所述自身车辆不从所述当前车道向所述左侧相邻车道脱离的紧急车道维持控制。
45.在本发明的一个侧面中,
46.当将中心线向左方向或者右方向弯曲时的所述中心线的曲率分别规定为正值或者负值时,
47.所述控制单元构成为:
48.在存在所述左侧相邻车道、所述同方向条件不成立、且所述操舵输入值为所述操舵阈值以上的第4情况下,运算作为所述当前车道与所述左侧相邻车道之间的区划线的中心线的曲率,
49.在所述中心线的曲率为具有正值的预定的曲率阈值以上的情况下成立的曲率条件成立时,基于所述中心线的曲率来运算在所述自身车辆的前方在所述左侧相邻车道上行驶的其他车辆的轨迹。
50.在本发明的一个侧面中,
51.所述控制单元构成为:
52.在存在所述左侧相邻车道、所述同方向条件不成立、且所述操舵输入值为所述操舵阈值以上的第4情况下,运算作为所述当前车道与所述左侧相邻车道之间的区划线的中心线的曲率,
53.基于所述中心线的曲率来运算在所述自身车辆的前方在所述左侧相邻车道上行驶的其他车辆的轨迹。
54.在本发明的一个侧面中,
55.所述控制单元构成为:运算所述其他车辆的所述轨迹以使其曲率与所述中心线的曲率一致。
56.在上述说明中,为了有助于理解发明,用括号对与实施方式对应的发明的构成要件添加了在实施方式中所使用的标号,但发明的各构成要件并不限定于由所述标号规定的实施方式。
附图说明
57.图1是本发明的实施方式涉及的避撞装置的概略构成图。
58.图2是用于对条件2进行说明的图。
59.图3是用于对条件4进行说明的图。
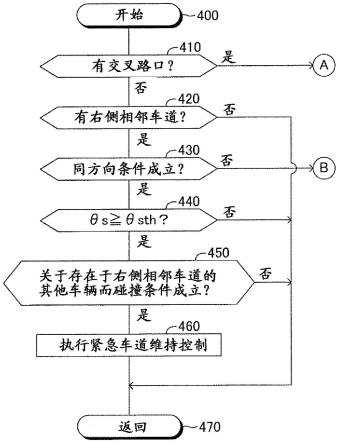
60.图4是表示避撞装置的避撞ecu的cpu执行的例程的流程图(其1)。
61.图5是表示cpu执行的例程的流程图(其2)。
62.图6是表示cpu执行的例程的流程图(其3)。
63.图7是表示cpu执行的例程的流程图(其4)。
64.标号说明
65.10:避撞ecu、20:摄像头传感器、21:操舵角传感器、22:转向灯sw、23:车速传感器、24:偏航率传感器、30:制动ecu、31:制动致动器(act)、40:转向ecu、41:马达驱动器、42:转向用马达、50:蜂鸣器
具体实施方式
66.(构成)
67.以下,参照附图对本发明的实施方式涉及的避撞装置(以下也称为“本实施装置”。)进行说明。如图1所示,本实施装置具备避撞ecu10、制动ecu30以及转向ecu40。ecu10、30以及40具备微型计算机来作为主要部分,经由未图示的can(controller area network,控制器局域网络)以相互能够进行收发的方式相连接。此外,ecu是electronic control unit(电子控制单元)的简写。微型计算机包括cpu、rom、ram以及接口等,cpu通过执行保存于rom的指令(程序、例程)来实现各种功能。ecu10、30以及40中的几个或者全部也可以合并为一个ecu来作为控制器。以下将搭载有本实施装置的车辆称为“自身车辆”。
68.本实施装置以搭载于在规定了左侧通行的国家中使用的自身车辆为前提来构成。本实施装置通过技术规格变更为将以下的说明中的左和右进行表达替换而成的构成,能够搭载于在规定了右侧通行的国家中使用的自身车辆。在该情况下,本说明书的“第1情况”和“第2情况”的记载分别表达替换为“第3情况”和“第4情况”。
69.避撞ecu10与周围传感器20、操舵角传感器21、转向灯开关(转向灯sw)22、车速传感器23以及偏航率传感器24连接,每经过预定周期时取得来自这些传感器和开关的信号。以下,将避撞ecu10也简称为“ecu10”。
70.周围传感器20(目标物信息取得装置)具备摄像头传感器20a和雷达传感器20b。
71.摄像头传感器20a设置在自身车辆的内部后视镜(内后视镜/后视镜)的背面。摄像头传感器20a具有取得与“存在于自身车辆的前方的立体物和向自身车辆的前方延伸的区划线”有关的信息的功能。立体物包括移动物(车辆、行人、自行车等)和固定物(护栏、侧壁、
中央分离带、街道树等)。此外,“移动物”意味着是能够移动的物体,并不是意味着总是移动。
72.摄像头传感器20a具备单眼摄像头。摄像头传感器20a对自身车辆前方的风景进行拍摄,基于拍摄到的图像数据来识别区划线。区划线是为了按方向对车辆的通行进行区分而标示于道路的线。区划线包括实线区划线和虚线区划线。实线区划线是连续地标示于道路的区划线,包括白色的区划线和黄色的区划线。虚线区划线是隔着预定间隔而断续地标示于道路的区划线,包括白色的区划线。在本实施装置中,将在车道上延伸的相邻的两条区划线之间的区域定义为车道。中心线是“在一方的方向上行进的车辆所处于的车道”与“在另一方的方向上行进的车辆所处于的车道”之间的区划线。能够由中心线分离车辆的行进方向。
73.摄像头传感器20a基于识别到的区划线来运算车道的形状(包括区划线的曲率c)。而且,摄像头传感器20a基于上述图像数据,运算立体物的有无以及自身车辆与立体物的相对关系。自身车辆与立体物的相对关系包括从自身车辆到立体物的距离、立体物相对于自身车辆的方位以及立体物相对于自身车辆的相对速度等。在本实施方式中,将区划线向右方向弯曲时的该区划线的曲率c规定为正值,将向左方向弯曲时的该区划线的曲率c规定为负值。
74.即,摄像头传感器20a能够检测存在于自身车辆的前方的立体物和向自身车辆的前方延伸的区划线。此外,“向自身车辆的前方延伸的区划线”也包括分别对左侧相邻车道和右侧相邻车道(分别与当前车道在其左侧和右侧相邻的车道)进行规定的左右的区划线。
75.雷达传感器20b设置在自身车辆的后保险杠的左右角部。雷达传感器20b具有取得与“存在于自身车辆的后方(包括后侧方)的立体物”有关的信息的功能。
76.雷达传感器20b向自身车辆的后方照射毫米波段的电波,在存在立体物的情况下,接收来自该立体物的反射波。雷达传感器20b基于该电波的照射定时和接收定时等,运算立体物的有无以及自身车辆与立体物的相对关系。
77.将由周围传感器20取得的信息称为目标物信息。周围传感器20向ecu10输出目标物信息。
78.此外,摄像头传感器20a也可以具备立体摄像头。而且,与车道的形状有关的信息也可以利用导航系统(省略图示)来取得。
79.操舵角传感器21(操舵输入值取得装置)检测自身车辆的方向盘的操舵角θs(操舵输入值),向ecu10输出该检测信号。在本实施方式中,将方向盘被向右转进行了操作时的操舵角θs规定为正值,将被向左转进行了操作时的操舵角θs规定为负值。
80.转向灯sw22设置于未图示的转向灯操作杆。转向灯操作杆是为了使未图示的转向灯工作(闪烁)而由自身车辆的驾驶员进行操作的操作器,设置在转向柱(后述的转向机构43的构成部件)。转向灯操作杆构成为能够以支轴为中心来从中立位置移动至作为分别向左转和右转转动了预定行程角度的位置的左行程位置和右行程位置。转向灯操作杆当通过驾驶员的操作而被移动至左行程位置或者右行程位置时,即使操作力解除,也通过锁定机构分别被保持在左行程位置或者右行程位置。在转向灯操作杆被保持在左行程位置或者右行程位置的状态下,当方向盘向右转或者左旋转方向进行了旋转时、或者当驾驶员向右转或者左旋转方向操作了转向灯操作杆时,通过锁定机构进行的锁定被解除,转向灯操作杆
回到中立位置。
81.转向灯sw22具有左转向灯sw和右转向灯sw。左转向灯sw仅在在转向灯操作杆位于左行程位置的情况下产生接通(on)信号,在不位于左行程位置的情况下产生断开(off)信号。右转向灯sw仅在转向灯操作杆位于右行程位置的情况下产生接通信号,在不位于右行程位置的情况下产生断开信号。ecu10取得左右的转向灯sw所产生的信号,在该信号为开启信号的情况下,使与左右的转向灯sw对应的转向灯闪烁。
82.车速传感器23产生与自身车辆的行驶速度(车速)相应的信号。ecu10取得车速传感器23所产生的信号,基于该信号来运算车速。
83.偏航率传感器24产生与作用于自身车辆的偏航率相应的信号。ecu10取得偏航率传感器24所产生的信号,基于该信号运算偏航率。
84.制动ecu30与制动致动器31连接。制动致动器31设置在通过制动踏板的踏力对工作油进行加压的主缸(省略图示)与设置于各车轮的摩擦制动机构32之间的油压回路。摩擦制动机构32具备固定于车轮的制动盘32a和固定于车体的制动钳32b,通过利用从制动致动器31供给的工作油的油压使内置于制动钳32b的车轮刹车泵进行工作,将刹车垫按压于制动盘32a来产生摩擦制动力。以下,将制动ecu30也简称为“ecu30”。
85.ecu10构成为能够对ecu30发送制动指令(后述)。ecu30当接收到制动指令时,根据该指令来对制动致动器31进行驱动(控制)。由此,ecu10能够经由ecu30对自身车辆自动地提供制动力。
86.转向ecu40是周知的电动助力转向系统的控制装置,与马达驱动器41连接。马达驱动器41与转向用马达42连接。转向用马达42组装于转向机构43(例如齿轮齿条副(rack and pinion)机构)。转向用马达42能够利用从马达驱动器41供给的电力来产生转矩,通过对转向机构43提供该转矩来产生转向辅助转矩,使左右的转向轮进行转向。以下,将转向ecu40也简称为“ecu40”。
87.ecu10构成为能够对ecu40发送操舵指令(后述)。ecu40当接收到操舵指令时,根据该指令来对转向用马达42进行驱动(控制)。由此,ecu10能够经由ecu40自动地对转向轮的转向角进行变更。
88.蜂鸣器50内置于未图示的仪表面板。ecu10构成为能够使蜂鸣器50鸣动。
89.接着,对ecu10进行说明。本实施装置构成为能够执行以下的三种控制、即自动制动控制、紧急车道维持控制以及车道脱离抑制控制。本实施装置执行自动制动控制来作为避撞控制。
90.(自动制动控制)
91.自动制动控制是在碰撞条件成立的情况下自动地对自身车辆提供制动力的控制。碰撞条件是在自身车辆有可能与立体物(严格来说为存在于自身车辆的前方的立体物)碰撞的情况下成立的条件。对于碰撞条件是否成立,由ecu10进行判定。
92.具体而言,ecu10分别运算自身车辆的轨迹和立体物的轨迹。自身车辆的轨迹可以基于自身车辆的转弯半径来进行运算,该转弯半径基于从车速传感器23取得的车速和从偏航率传感器24取得的偏航率来进行运算。立体物的轨迹能够基于“目标物信息所包含的该立体物的位置(方位和距离)”的推移来运算。立体物的轨迹典型地为速度矢量。ecu10基于这些轨迹,判定在自身车辆维持当前的行驶状态来行驶、并且立体物维持当前的移动状态
进行了移动的情况下自身车辆是否会与该立体物碰撞。此外,在立体物为静止物的情况下,ecu10基于自身车辆的轨迹和立体物的当前位置,判定自身车辆是否会与立体物碰撞。
93.在判定为了自身车辆会与立体物碰撞的情况下,ecu10运算碰撞预测时间(ttc:time to collision),该碰撞预测时间是到自身车辆与立体物碰撞为止的预测时间。ttc能够通过对从自身车辆到判定为了“会与立体物碰撞的地点”为止的距离除以自身车辆相对于立体物的相对速度来进行运算。ecu10在ttc为预定的ttc阈值以下的情况下,判定为自身车辆有可能与立体物碰撞、即碰撞条件成立。
94.在碰撞条件成立的情况下,ecu10向ecu30发送制动指令。更详细而言,ecu10运算为了使自身车辆相对于碰撞条件成立的立体物停止在预定距离的跟前所需要的目标减速度,向ecu30发送作为包括该目标减速度的指令的制动指令。此外,减速度是指负的加速度。
95.ecu30当接收到制动指令时,对制动致动器31进行控制来使各车轮产生摩擦制动力而使自身车辆减速,以使得实际的加速度与目标减速度一致。以上为自动制动控制的概要。此外,自动制动控制由从ecu10接受了制动指令的ecu30执行,因此,以下为了便于说明也称为“ecu10执行自动制动控制”。
96.(紧急车道维持控制)
97.紧急车道维持控制是在关于存在于左侧或者右侧相邻车道的立体物(典型地为其他车辆)而碰撞条件成立的情况下自动地自身车辆的转向轮的转向角进行变更以使得自身车辆不从当前车道向“碰撞条件成立的立体物所存在的一侧的相邻车道”脱离的控制。
98.具体而言,ecu10使用目标物信息判定是否存在左侧或者右侧相邻车道,在存在的情况下,判定在左侧或者右侧相邻车道是否存在立体物。在存在立体物的情况下,ecu10关于该立体物判定碰撞条件是否成立。
99.在关于存在于左侧或者右侧相邻车道的立体物而碰撞条件成立的情况下,ecu10向ecu40发送操舵指令。更详细而言,ecu10将目标位置设定为当前车道内的预定位置,通过周知的方法运算经过自身车辆的前端中央位置和目标位置的光滑的目标轨迹(例如参照日本特开2018-144675。)。然后,ecu10运算为了使自身车辆沿着目标轨迹行驶所需要的目标舵角,向ecu40发送作为包括该目标舵角的指令的操舵指令。
100.ecu40当接收到操舵指令时,按照目标舵角来控制转向用马达42使转向轮进行转向。由此,转向轮的转向角被自动地进行变更(即对转向机构23提供操舵转矩),自身车辆不从当前车道脱离地进行行驶以避免与立体物的碰撞。以上是紧急车道维持控制的概要。此外,紧急车道维持控制由从ecu10接受了操舵指令的ecu40执行,因此,以下为了便于说明而也称为“ecu10执行紧急车道维持控制”。
101.(车道脱离抑制控制)
102.车道脱离抑制控制是在转向灯未闪烁的状态下自身车辆有可能从当前车道脱离时向驾驶员发出警报的控制。
103.具体而言,ecu10基于从操舵角传感器21取得的操舵角θs和目标物信息所包含的当前车道的区划线的曲率co,判定自身车辆是否有可能从当前车道脱离。例如,ecu10在操舵角θs为具有正值的预定的操舵角阈值θsth(操舵阈值)以上(θs≥θsth)、且曲率co小于具有正值的预定的曲率阈值cth(co<cth)的情况下,判定为自身车辆有可能从当前车道脱离。此外,θs≥θsth成立的情况是指驾驶员以操舵角阈值θsth以上的操舵角θs向右转进行
操舵操作的情况。co<cth成立的情况是指当前车道为直线状或者向左方向弯曲的情况。在自身车辆有可能从当前车道脱离的情况下,ecu10基于转向灯sw22产生的信号判定转向灯(严格来说为与脱离方向对应的转向灯)是否闪烁。
104.在转向灯未闪烁的情况下,ecu10使蜂鸣器50鸣动来向驾驶员发出警报。以上为车道脱离抑制控制的概要。此外,操舵角阈值θsth根据车速而变化。即,在ecu10的rom中预先保存有规定了车速与操舵角θs的关系的映射,ecu10参照该映射来将与当前的车速对应的操舵角θs设定为操舵角阈值θsth。该映射以车速越大、操舵角θs越小的方式来生成。
105.(工作的概要)
106.ecu10基于从传感器和开关(参照图1)取得的信息,判定是否执行自动制动控制、紧急车道维持控制以及车道脱离抑制控制的各个控制。以下,对是否执行各控制的判定基准的概要进行说明。
107.[自动制动控制]
[0108]
(条件1)
[0109]
(1)在自身车辆的前方具有交叉路口。
[0110]
(2)右侧的转向灯处于闪烁状态。
[0111]
(3)关于对向车辆或者其他立体物而碰撞条件成立。
[0112]
条件1(1)~(3)均成立的情况是指“自身车辆在交叉路口右转时有可能与对向车辆或者其他立体物(例如在交叉路口中通行的行人)碰撞的情况”。在该情况下,ecu10执行自动制动控制。
[0113]
(条件2)
[0114]
(1)在自身车辆的前方没有交叉路口。
[0115]
(2)右侧相邻车道为对向车道。
[0116]
(3)驾驶员以操舵角θs(≥θsth)向右转进行操舵操作。
[0117]
(4)当前车道(以及右侧相邻车道)向右方向弯曲。
[0118]
(5)关于对向车辆或者其他立体物而碰撞条件成立。
[0119]
条件2(1)~(5)均成立的情况是指“自身车辆在向右方向弯曲的当前车道上一边由驾驶员向右转进行操舵操作、一边行驶时,有可能与对向车辆或者其他立体物碰撞的情况”。在该情况下,ecu10执行自动制动控制。此外,“其他立体物”例如是指在位于对向车辆的右侧的人行道上通行的行人。
[0120]
但是,在条件2(5)中,在关于对向车辆判定碰撞条件是否成立的情况下,ecu10变更对向车辆的轨迹的运算方法。即,不是基于对向车辆的位置的推移来运算对向车辆的轨迹,而是以使对向车辆的轨迹的曲率与中心线的曲率cc一致的方式运算对向车辆的轨迹。该轨迹的运算方法也可以应用于其他立体物。此外,“条件2(1)~(3)均成立的情况”相当于“第2情况”的一个例子。
[0121]
参照图2来进行具体的说明。如图2所示,车道60由相邻的两条区划线l1和l2来规定。自身车辆v在车道60上行驶。即,车道60为当前车道。车道61由相邻的两条区划线l2和l3来规定。车道61为当前车道60的右侧相邻车道。对向车辆vo在车道61上行驶。即,车道61为对向车道,区划线l2为中心线。人行道62位于对向车道61的右侧。行人o在人行道62上沿着接近自身车辆v的方向通行。当前车道60、对向车道61以及人行道62向右方向弯曲(换言之,
中心线l2的曲率cc为曲率阈值cth以上。)。自身车辆v的驾驶员为了使自身车辆v沿着当前车道60行驶而向右转进行操舵操作。即,在图2中,条件2(1)~(4)成立。对向车辆vo的驾驶员为了使对向车辆vo沿着对向车道61行驶,从对向车辆vo的驾驶员来看向左转进行操舵操作。
[0122]
通过自身车辆v被向右转进行操舵操作,其轨迹tv向右方向弯曲。与此相对,当基于对向车辆vo的位置的推移来运算其轨迹时,其轨迹如箭头tvoc所示那样成为向当前车道60延伸的直线状。因此,关于对向车辆vo而碰撞条件容易成立,尽管实际上自身车辆v与对向车辆vo碰撞的可能性极低,但却会成为执行不必要的自动制动控制。
[0123]
于是,ecu10构成为:在关于对向车辆vo判定碰撞条件是否成立的情况下,以对向车辆vo的轨迹的曲率与中心线l2的曲率cc一致的方式运算对向车辆vo的轨迹。箭头tvo表示这样运算出的轨迹。由此,对向车辆vo的轨迹tvo的运算精度提高,作为结果,关于对向车辆vo而碰撞条件是否成立的判定精度(条件2(5)的判定精度)提高。根据该构成,能够降低在行驶期间中自身车辆v的驾驶员向右转进行了操舵操作的情况下执行不必要的自动制动控制的可能性。
[0124]
行人o的轨迹的运算方法不被特别地限定。例如,ecu10也可以以使行人o的轨迹的曲率与中心线l2的曲率cc一致的方式运算行人o的轨迹。
[0125]
此外,对向车辆的轨迹也可以如以下那样来运算。即,自身车辆和先行车辆分别具备能够与服务器进行通信的通信机、gps接收机以及地图信息。先行车辆能够向服务器发送与整个比较的长期间的对向车辆的位置的推移有关的信息。服务器具备地图信息,能够将所接收到的上述信息与接收时刻一起进行保存。自身车辆对服务器进行访问来取得上述信息。ecu10基于所取得的信息来运算对向车辆的轨迹。通过该构成,也能够提高对向车辆的轨迹的运算精度。
[0126]
(条件3)
[0127]
(1)在自身车辆的前方没有交叉路口。
[0128]
(2)右侧相邻车道为对向车道。
[0129]
(3)驾驶员以操舵角θs(≥θsth)向右转进行操舵操作。
[0130]
(4)当前车道(以及右侧相邻车道)为直线状或者向左方向弯曲。
[0131]
(5)右侧的转向灯闪烁。
[0132]
(6)关于对向车辆或者其他立体物而碰撞条件成立。
[0133]
条件3(1)~(6)均成立的情况是指“自身车辆在直线状或者向左方向弯曲的当前车道上右转时有可能与对向车辆或者其他立体物(例如在位于对向车辆的右侧的人行道上通行的行人)碰撞的情况”。在该情况下,ecu10执行自动制动控制。此外,“条件3(1)~(3)均成立的情况”相当于“第2情况”的一个例子。
[0134]
[紧急车道维持控制]
[0135]
(条件4)
[0136]
(1)在自身车辆的前方没有交叉路口。
[0137]
(2)右侧相邻车道为同方向车道(行进方向与自身车辆的行进方向相同的其他车辆行驶的车道)。
[0138]
(3)驾驶员以操舵角θs(≥θsth)向右转进行操舵操作。
[0139]
(4)关于存在于右侧相邻车道的其他车辆而碰撞条件成立。
[0140]
条件4(1)~(4)均成立的情况是指“自身车辆开始向右侧相邻车道的车道变更或者合流、由此产生了与存在于右侧相邻车道的其他车辆碰撞的可能性的情况”。在该情况下,ecu10执行紧急车道维持控制。换言之,ecu10即使碰撞条件(不只是关于存在于右侧相邻车道的其他车辆的碰撞条件,也包括关于对向车辆或者其他立体物的碰撞条件)成立,也不执行自动制动控制。此外,“条件4(1)~(3)均成立的情况”相当于“第1情况”的一个例子。
[0141]
参照图3进行具体的说明。如图3所示,车道70由相邻的两条区划线l4和l5规定。自身车辆v在车道70上行驶。即,车道70为当前车道。车道71由相邻的两条区划线l5和l6规定。车道71为当前车道70的右侧相邻车道,并且是同方向车道。车道72由相邻的两条区划线l6和l7规定。对向车辆vo在车道72上行驶。即,车道72为对向车道,区划线l6为中心线。当前车道70、右侧相邻车道71以及对向车道72呈直线状延伸。自身车辆v的驾驶员从当前车道70向右侧相邻车道71开始车道变更。即,在图3中,条件4(1)~(3)成立。对向车辆vo在对向车道72上直行。
[0142]
通过伴随着车道变更而自身车辆v的驾驶员向右转进行操舵操作,自身车辆v的轨迹tv向右方向(即向对向车道72)弯曲,暂时性地与右转时的轨迹一致。因此,在驾驶员向右转进行操舵操作的期间中,关于对向车辆vo而碰撞条件容易成立,尽管实际上自身车辆v与对向车辆vo碰撞的可能性极低,但却会成为执行不必要的自动制动控制。
[0143]
于是,ecu10构成为:即使在条件4(1)~(3)成立的情况下碰撞条件成立,也不执行自动制动控制。由此,能够降低在行驶期间中自身车辆v的驾驶员向右转进行了操舵操作的情况下执行不必要的自动制动控制的可能性。
[0144]
然而,在自身车辆v进行向右侧相邻车道的车道变更或者合流的情况下,根据与存在于右侧相邻车道的其他车辆的相对关系,有可能与该他车辆碰撞。于是,ecu10构成为:在条件4(1)~(3)成立的情况下关于“存在于右侧相邻车道的其他车辆”而碰撞条件成立时,代替自动制动控制而执行紧急车道维持控制。由此,能够安全地进行向右侧相邻车道的车道变更或者合流。
[0145]
此外,ecu10也可以构成为:在条件4(1)~(3)成立的情况下碰撞条件成立时,不是不执行自动制动控制,而是将ttc阈值(严格来说为在自动制动控制的碰撞条件中使用的ttc阈值)降低为预定值。由此,碰撞条件难以成立,因此,根据该构成也能够降低执行不必要的自动制动控制的可能性。
[0146]
在该情况下,紧急车道维持控制也可以不被执行。或者,也可以通过“在条件4(1)~(4)成立的情况下”进行紧急车道维持控制,“在条件4(4)不成立、但关于对向车辆或者其他立体物而碰撞条件成立的情况下”进行自动制动控制,使两个控制进行协调(其中,在紧急车道维持控制的碰撞条件中使用的ttc阈值不被降低)。
[0147]
(条件5)
[0148]
(1)在自身车辆的前方没有交叉路口。
[0149]
(2)右侧相邻车道为对向车道。
[0150]
(3)驾驶员以操舵角θs(≥θsth)向右转进行操舵操作。
[0151]
(4)当前车道(以及右侧相邻车道)为直线状或者向左方向弯曲。
[0152]
(5)右侧的转向灯不闪烁。
[0153]
条件5(1)~(5)均成立的情况是指“自身车辆有可能从直线状或者向左方向弯曲的当前车道向对向车道侧脱离的情况”。在该情况下,ecu10执行车道脱离抑制控制。
[0154]
以上为工作的概要。
[0155]
(具体的工作)
[0156]
接着,对ecu10的cpu的具体工作进行说明。cpu“在自身车辆的前方即使是只检测到当前车道的区划线的一部分”的期间中,每当经过预定时间时,执行图4~图7中由流程图表示的例程。
[0157]
当成为预定定时时,cpu从图4的步骤400开始处理而进入步骤410,基于目标物信息判定在自身车辆的前方是否具有交叉路口。对于在自身车辆的前方是否具有交叉路口,可以根据从自身车辆到前进了预定距离的地点是否连续地检测到当前车道的区划线来进行判定。在此,“预定距离”是指假定为了自身车辆以当前的车速行驶了预定时间的情况下的行驶距离。cpu即使是在所检测到的区划线被中断的情况下,在中断了的区划线彼此的间隔小于预定的距离阈值时,也通过对中断了的部分进行插值(内插)来判定为“连续地检测到区划线”。cpu在到上述地点为止未连续地检测到当前车道的区划线的情况下,在步骤410中判定为“是”(判定为在自身车辆的前方具有交叉路口),进入图5的步骤500。
[0158]
在步骤500中,cpu判定右侧的转向灯是否处于闪烁状态。在右侧的转向灯处于熄灭状态的情况下,cpu在步骤500中判定为“否”,进入步骤530而暂时结束本例程。即,自身车辆在交叉路口中直行。另一方面,在右侧的转向灯处于闪烁状态的情况下,cpu在步骤500中判定为“是”(判定为具有右转意图),进入步骤510。
[0159]
在步骤510中,cpu关于对向车辆或者其他立体物判定碰撞条件是否成立。在碰撞条件不成立的情况下,cpu在步骤510中判定为“否”,进入步骤530而暂时结束本例程。即,自身车辆在交叉路口中右转。另一方面,在碰撞条件成立的情况下(即条件1(1)~(3)均成立的情况下),cpu在步骤510中判定为“是”而进入步骤520。
[0160]
在步骤520中,cpu相对于碰撞条件成立的对向车辆或者其他立体物执行自动制动控制。然后,cpu进入步骤530而暂时结束本例程。
[0161]
与此相对,在图4的步骤410中从自身车辆到前进了预定距离的地点连续地检测到当前车道的区划线的情况下,cpu在步骤410中判定为“否”(判定为在自身车辆的前方没有交叉路口),进入步骤420。
[0162]
在步骤420中,cpu基于目标物信息判定是否存在右侧相邻车道。对于是否存在右侧相邻车道,可以通过相对于当前车道的右侧区划线而在右侧是否检测到区划线来进行判定。cpu在未检测到该区划线的情况下,在步骤420中判定为“否”(判定为不存在右侧相邻车道),进入步骤470而暂时结束本例程。另一方面,cpu在检测到该区划线的情况下,在步骤420中判定为“是”(判定为存在右侧相邻车道),进入步骤430。
[0163]
在步骤430中,cpu基于目标物信息判定同方向条件是否成立。同方向条件是在右侧相邻车道上行驶的其他车辆的行进方向与自身车辆的行进方向相同(即该车道为同方向车道)的情况下成立的条件。对于同方向条件是否成立,可以基于自身车辆的速度矢量和在右侧相邻车道上行驶的其他车辆的速度矢量所成的角度θ(0度≤θ≤360度)来进行判定。两速度矢量分别可以基于目标物信息来进行运算。cpu在角度θ为预定的对向方向范围(例如150度≤θ≤210度)内的情况下,在步骤430中判定为“否”(判定为右侧相邻车道为对向车
道),进入图6的步骤600。
[0164]
此外,在右侧相邻车道上未行驶其他车辆、无法判定同方向条件是否成立的情况下,cpu构成为在步骤430中判定为“是”(判定为右侧相邻车道为同方向车道)。
[0165]
对于同方向条件是否成立,也可以通过以下的任一方法进行判定。在第1个方法中构成为上述服务器能够将与车辆的行驶历史记录有关的信息记录于其存储器。自身车辆具备的上述通信机对服务器进行访问来取得与在右侧相邻车道上行驶的其他车辆的行驶历史记录有关的信息。cpu基于所取得的信息判定同方向条件是否成立。在第2个方法中,自身车辆具备能够与设置在车道的侧边的车外通信机进行路车间通信的通信机。车外通信机构成为能够将与在右侧相邻车道上进行了行驶的其他车辆的行驶历史记录有关的信息记录于其存储器。自身车辆的通信机对车外通信机进行访问来取得该信息。cpu基于所取得的信息来判定同方向条件是否成立。
[0166]
在步骤600中,cpu判定当前的操舵角θs是否为操舵角阈值θsth以上(即驾驶员是否以操舵角θs(≥θsth)向右转进行操舵操作)。在θs<θsth成立的情况下,cpu在步骤600中判定为“否”,进入步骤650而暂时结束本例程。即,自身车辆继续在当前车道上行驶、向左侧相邻车道进行车道变更或者在当前车道上左转。另一方面,在θs≥θsth成立的情况下,cpu在步骤600中判定为“是”而进入步骤610。
[0167]
在步骤610中,cpu基于目标物信息判定曲率条件是否成立。曲率条件是在中心线的曲率cc为曲率阈值cth以上的情况下成立的条件。cpu在曲率条件成立(cc≥cth)的情况下,在步骤610中判定为“是”(判定为当前车道(和对向车道)向右方向弯曲),进入步骤620。
[0168]
在步骤620中,cpu以使对向车辆的轨迹的曲率与中心线的曲率cc一致的方式运算对向车辆的轨迹。然后,cpu进入步骤630,关于对向车辆或者其他立体物判定碰撞条件是否成立。在碰撞条件不成立的情况下,cpu在步骤630中判定为“否”,进入步骤650而暂时结束本例程。即,自身车辆继续在向右方向弯曲的当前车道上行驶。另一方面,在碰撞条件成立的情况下(即条件2(1)~(5)均成立的情况下),cpu在步骤630中判定为“是”而进入步骤640。
[0169]
在步骤640中,cpu相对于碰撞条件成立的对向车辆或者其他立体物执行自动制动控制。根据该构成,在步骤620中基于中心线的曲率cc来运算对向车辆的轨迹,因此,步骤630中的碰撞条件的判定精度提高。因此,能够降低在明显不进行如自身车辆横穿对向车道那样的右转的情况下执行不必要的自动制动控制的可能性。cpu然后进入步骤650而暂时结束本例程。
[0170]
与此相对,在步骤610中,在曲率条件不成立(cc<cth)的情况下,cpu在步骤610中判定为“否”(判定为当前车道(以及对向车道)为直线状或者向左方向弯曲),进入图7的步骤700。
[0171]
在步骤700中,cpu判定右侧的转向灯是否处于闪烁状态。在右侧的转向灯处于闪烁状态的情况下,cpu在步骤700中判定为“是”(判定为具有右转意图),进入步骤710。
[0172]
在步骤710中,cpu关于对向车辆或者其他立体物判定碰撞条件是否成立。在碰撞条件不成立的情况下,cpu在步骤710中判定为“否”,进入步骤740而暂时结束本例程。即,自身车辆在直线状或者向左方向弯曲的当前车道上右转。另一方面,在碰撞条件成立的情况下(即条件3(1)~(6)均成立的情况下),cpu在步骤710中判定为“是”而进入步骤720。
[0173]
在步骤720中,cpu相对于碰撞条件成立的对向车辆或者其他立体物执行自动制动控制。然后,cpu进入步骤740而暂时结束本例程。
[0174]
另一方面,在步骤700中右侧的转向灯处于熄灭状态的情况下(即条件5(1)~(5)均成立的情况下),cpu在步骤700中判定为“否”(判定为自身车辆有可能从当前车道向对向车道侧脱离),进入步骤730。在步骤730中,cpu执行车道脱离抑制控制。然后,cpu进入步骤740而暂时结束本例程。
[0175]
与此相对,在图4的步骤430中角度θ为预定的同方向范围(例如0度≤θ≤30度、330度≤θ≤360度)以下的情况下,cpu在步骤430中判定为“是”(判定为右侧相邻车道为同方向车道),进入步骤440。
[0176]
在步骤440中,cpu判定θs≥θsth是否成立。在θs<θsth成立的情况下,cpu在步骤440中判定为“否”,进入步骤470而暂时结束本例程。即,自身车辆继续在当前车道上行驶、向左侧相邻车道进行车道变更或者在当前车道上左转。另一方面,在θs≥θsth成立的情况下,cpu在步骤440中判定为“是”(即判定为自身车辆要从当前车道向右侧相邻车道进行车道变更或者合流),进入步骤450。
[0177]
在步骤450中,cpu基于目标物信息,关于存在于右侧相邻车道的其他车辆判定碰撞条件是否成立。在碰撞条件不成立的情况下,cpu在步骤450中判定为“否”,进入步骤470而暂时结束本例程。即,自身车辆从当前车道向右侧相邻车道进行车道变更或者合流。另一方面,在碰撞条件成立的情况下(即条件4(1)~(3)均成立的情况下),cpu在步骤450中判定为“是”,进入步骤460。
[0178]
在步骤460中,cpu执行紧急车道维持控制。根据该构成,即使关于对向车辆或者其他立体物而碰撞条件成立,也不执行自动制动控制,因此,能够降低在明显不进行如自身车辆横穿对向车道那样的右转的情况下执行不必要的自动制动控制的可能性。而且,通过执行紧急车道维持控制,能够安全地进行向右侧相邻车道的车道变更或者合流。cpu然后进入步骤470而暂时结束本例程。
[0179]
(变形例)
[0180]
接着,对本发明的变形例涉及的避撞装置(以下也称为“变形装置”。)进行说明。在以下中,对与实施方式相同的构成赋予同一标号,省略详细的说明。
[0181]
在变形装置中,条件2的构成与本实施装置不同。具体而言,变形装置的ecu10在条件2(1)~(3)成立的情况下,与条件2(4)是否成立无关地,判定条件2(5)是否成立。即,与当前车道(以及右侧相邻车道)的形状无关地,关于对向车辆或者其他立体物判定碰撞条件是否成立。此外,关于条件2(5),对对向车辆的轨迹的运算方法进行变更这一点与本实施装置是同样的。条件2(1)~(3)以及(5)均成立的情况是指“自身车辆在当前车道上一边由驾驶员向右转进行操舵操作、一边行驶时,有可能与对向车辆或者其他立体物碰撞的情况”。在该情况下,ecu10执行自动制动控制。
[0182]
根据变形装置的构成,关于对向车辆而碰撞条件是否成立的判定精度(条件2(5)的判定精度)也提高,因此,能够实现与本实施装置同样的作用效果。
[0183]
以上,对实施方式以及变形例涉及的避撞装置进行了说明,但本发明并不限定于上述实施方式以及变形例,只要不脱离本发明的目的,则可以进行各种变更。
[0184]
例如,作为避撞控制,也可以代替自动制动控制或者在自动制动控制的基础上执
行自动操舵控制。自动操舵控制在自动地对自身车辆的转向轮的转向角进行变更这一点上与紧急车道维持控制是同样的。然而,紧急车道维持控制的目的在于自身车辆不脱离到“自身车辆有可能碰撞的其他车辆”所存在的相邻车道,与此相对,自动操舵控制的目的在于避免与自身车辆有可能碰撞的立体物的碰撞(或者减轻碰撞),在这一点上两者不同。
[0185]
而且,ecu10也可以与操舵转矩传感器连接。对于驾驶员是否向右转进行操舵操作,也可以基于从操舵转矩传感器取得的操舵转矩来进行判定。
[0186]
进一步,车道脱离抑制控制也可以不只是向驾驶员发出警报的控制,而是包括自动地对自身车辆的转向轮的转向角进行变更以使得自身车辆不从当前车道脱离的控制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1