停车辅助装置的制作方法
1.本公开涉及执行用于使停车了的车辆向行驶道路移动的停车辅助控制的停车辅助装置。
背景技术:
2.以往以来,提出了一种停车辅助装置(例如参照专利文献1。),其使用搭载于车辆的“摄像头和传感器等”的环境传感器来检测车辆的周边状况,执行停车辅助控制以使得车辆移动至根据所检测到的周边状况设定的目标位置。停车辅助控制包括对车辆的转向角进行控制的转向角控制、对车辆的驱动力进行控制的驱动力控制以及对车辆的制动力进行控制的制动力控制。
3.现有技术文献
4.专利文献1:日本特开2015-174586号公报
技术实现要素:
5.在通过停车辅助控制使车辆向行驶道路移动(出库)的情况下,其他物体(例如行人和其他车辆等)有可能从车辆的右侧以及/或者左侧接近。考虑到该情况,假定为在执行停车辅助控制的期间中会使车辆停止多次。由此,给予驾驶员确认行驶道路的状况的多个机会。但是,在使车辆停止多次的情况下,有时尽管驾驶员已经确认了行驶道路的状况,但车辆仍会停止。因此,驾驶员会感到麻烦。
6.本发明是为了解除上述问题而完成的。即,本发明的目的之一在于提供能够根据车辆的周边状况对停车辅助控制中的车辆的停止次数进行变更的停车辅助装置。
7.一个以上的实施方式中的停车辅助装置具备:
8.信息取得装置(70、71、72),其取得车辆周边信息,所述车辆周边信息包括关于存在于停车了的车辆(sv)的周围的物体的信息;和
9.控制单元(10),
10.所述控制单元构成为:
11.在产生了辅助要求时,基于所述车辆周边信息,设定使所述车辆移动到了行驶道路(rd)时的所述车辆的目标位置(ptgt),
12.运算用于使所述车辆从所述车辆的当前位置(po)向所述目标位置进行移动的移动路径(mp),
13.执行至少包括用于对所述车辆的转向角进行变更的转向角控制、对所述车辆的驱动力进行控制的驱动力控制以及对所述车辆的制动力进行控制的制动力控制的停车辅助控制,以使得所述车辆沿着所述移动路径进行移动。
14.所述控制单元构成为:基于所述车辆周边信息,对所述车辆在所述车辆按照所述移动路径进行移动的期间停止的次数进行变更。
15.根据上述构成,停车辅助装置能够一边对驾驶员给与使之确认行驶道路的状况的
机会,一边减少驾驶员感到麻烦的可能性。
16.在一个以上的实施方式中,所述控制单元构成为:基于所述车辆周边信息,
17.检测存在于第1侧的第1物体(ob1),所述第1侧是所述车辆的右侧和左侧中的一侧,
18.检测存在于第2侧的第2物体(ob2),所述第2侧是所述车辆的所述右侧和所述左侧中的另一侧。
19.所述控制单元构成为:基于作为所述车辆的所述行驶道路侧的端部的车辆端部(sva)、作为所述第1物体的所述行驶道路侧的端部的第1端部(ob1a)以及作为所述第2物体的所述行驶道路侧的端部的第2端部(ob2a)之间的位置关系,对所述次数进行变更。
20.在一个以上的实施方式中,所述控制单元构成为:
21.基于所述位置关系,判定当前的状况是否为预定的第1状况,
22.在判定为所述当前的状况为所述第1状况的情况下,将所述次数设定为2次。
23.所述第1状况包括所述第1物体和所述第2物体这两方妨碍从所述车辆看的视野、且所述第1端部与所述第2端部之间的所述车辆的前后方向上的距离(d3)比预定阈值(dth2)大的状况。
24.所述控制单元构成为:在所述车辆按照所述移动路径进行移动的期间中,
25.在所述车辆端部到达了比所述第1端部靠前预定距离(ds)的位置时,使所述车辆停止,
26.在所述车辆端部到达了比所述第2端部靠前所述预定距离(ds)的位置时,使所述车辆停止。
27.此外,“从车辆看的视野”意味着能够从所述车辆确认的所述行驶道路的范围、且能够由所述车辆的驾驶员或者所述信息取得装置(例如摄像头)看到的所述行驶道路的范围。
28.根据上述构成,停车辅助装置在第1状况下使车辆停止2次。具体而言,停车辅助装置使车辆在第1物体不遮挡视野的位置停止,进一步,使车辆在第2物体不遮挡视野的位置停止。驾驶员能够切实地确认行驶道路内的状况。
29.在一个以上的实施方式中,所述控制单元构成为:
30.基于所述位置关系,判定当前的状况是否为预定的第2状况,
31.在判定为所述当前的状况为所述第2状况的情况下,将所述次数设定为1次。
32.所述第2状况包括所述第1物体和所述第2物体这两方妨碍从所述车辆看的视野且所述第1端部与所述第2端部之间的所述车辆的前后方向上的距离(d3)为预定阈值(dth2)以下的状况和仅所述第1物体妨碍所述视野的状况。
33.所述控制单元构成为:在所述车辆按照所述移动路径进行移动的期间中,在所述车辆端部到达了比所述第1端部靠前预定距离(ds)的位置时,使所述车辆停止。
34.根据上述构成,停车辅助装置在第2状况下使车辆在驾驶员能够确认从右侧和左侧接近的其他物体的位置仅停止1次。即使是1次的停止,驾驶员也能够充分地确认行驶道路内的状况。因此,能够一边对驾驶员给与使之确认行驶道路的状况的机会,一边减少驾驶员感到麻烦的可能性。
35.在一个以上的实施方式中,所述控制单元构成为:
36.基于所述位置关系,判定当前的状况是否为预定的第3状况,
37.在判定为所述当前的状况为所述第3状况的情况下,将所述次数设定为零。
38.所述第3状况包括所述第1物体和所述第2物体这两方没有妨碍从所述车辆看的视野的状况。
39.根据上述构成,在第3状况下,停车辅助装置不使车辆停止。因此,能够减少驾驶员感到麻烦的可能性。
40.在一个以上的实施方式中,所述控制单元构成为:运算第1距离(d1)、第2距离(d2)以及第3距离(d3)来作为与所述位置关系有关的信息,所述第1距离是所述车辆端部(sva)与所述第1端部(ob1a)之间的所述车辆的前后方向上的距离,所述第2距离是所述车辆端部(sva)与所述第2端部(ob2a)之间的所述车辆的前后方向上的距离,所述第3距离是所述第1端部(ob1a)与所述第2端部(ob2a)之间的所述车辆的前后方向上的距离。
41.在一个以上的实施方式中,上述控制单元也可以通过为了执行本说明书所记载的一个以上的功能而被进行了编程的微处理器来实施。在一个以上的实施方式中,上述控制单元也可以通过由专用于一个以上的应用的集成电路、即asic等构成的硬件来整体地或者部分地实施。
42.在上述说明中,为了有助于理解发明,用括号对与后述的实施方式对应的发明的构成添加了在该实施方式中使用了的名称以及/或者标号。然而,发明的各构成要素并不限定于由所述名称以及/或者标号规定的实施方式。本发明的实施方式的进一步的特征根据本说明书的记载和附图等来明确。
附图说明
43.图1是一个以上的实施方式涉及的停车辅助装置的概略构成图。
44.图2是表示超声波传感器和摄像头的配置的车辆的俯视图。
45.图3是对触摸面板的显示模式为第2模式的情况下所显示的画面(辅助模式画面)进行说明的图。
46.图4是用于对第1状况的一个例子进行说明的图。
47.图5是用于对第1状况的一个例子进行说明的图。
48.图6是用于对第1状况的一个例子进行说明的图。
49.图7是用于对第1状况的一个例子进行说明的图。
50.图8是用于对第1状况的一个例子进行说明的图。
51.图9是用于对第2状况的一个例子进行说明的图。
52.图10是用于对第2状况的一个例子进行说明的图。
53.图11是用于对第2状况的其他例子进行说明的图。
54.图12是用于对第2状况的其他例子进行说明的图。
55.图13是用于对第3状况的一个例子进行说明的图。
56.图14是用于对第3状况的其他例子进行说明的图。
57.图15是用于对显示于辅助模式画面的消息进行说明的图。
58.图16是用于对显示于辅助模式画面的消息进行说明的图。
59.图17是表示了停车辅助ecu的cpu执行的“出库辅助开始例程”的流程图。
60.图18是表示了cpu执行的“停车辅助控制执行例程”的流程图。
61.图19是表示了cpu执行的“中断例程”的流程图。
62.图20是表示了cpu执行的“停车辅助控制结束例程”的流程图。
63.标号说明
64.10停车辅助ecu、20发动机ecu、30制动器ecu、40 sbw ecu、50 eps ecu、60导航ecu、70环境传感器。
具体实施方式
65.以下,参照附图对一个以上的实施方式进行说明。停车辅助装置被应用于车辆sv(参照图2)。
66.如图1所示,停车辅助装置具备停车辅助ecu10。停车辅助ecu10具备包括cpu10a、ram10b、rom10c以及接口(i/f)10d等的微型计算机。此外,在本说明书中,“ecu”意味着电控制装置(electric control unit)。ecu包括包含cpu、ram、rom以及接口等的微型计算机。cpu通过执行保存于rom的指令来实现各种功能。
67.停车辅助ecu10经由can(controller area network,控制器局域网)90连接于发动机ecu20、制动器ecu30、sbw(shift-by-wire,线控换挡)ecu40、电动助力转向ecu(以下称为“eps ecu”。)50以及导航ecu60。这些ecu经由can90相互以能够发送接收信息的方式相连接。因此,连接于特定ecu的传感器的检测值也被发送至其他ecu。
68.发动机ecu20连接于包括加速踏板操作量传感器21的发动机状态量传感器(省略图示)以及发动机致动器(act)22。加速踏板操作量传感器21检测加速踏板21a的操作量(加速器开度),产生表示加速踏板操作量ap的信号。
69.发动机ecu20基于加速踏板操作量ap和通过其他发动机状态量传感器检测的运转状态量(例如发动机转速),对发动机致动器22进行驱动。由此,发动机ecu20能够对内燃机23产生的转矩(发动机产生转矩)进行变更。发动机产生转矩经由变速器24被传递至驱动轮。因此,发动机ecu20通过对发动机致动器22进行控制,能够对车辆sv的驱动力进行控制。
70.此外,在车辆sv为混合动力车辆的情况下,发动机ecu20能够对通过作为车辆驱动源的“内燃机和电动机”中的任一方或者两方产生的驱动力进行控制。进一步,在车辆sv为电动汽车的情况下,发动机ecu20能够对通过作为车辆驱动源的电动机产生的驱动力进行控制。
71.制动器ecu30连接于制动踏板操作量传感器31以及制动致动器32。制动踏板操作量传感器31检测制动踏板31a的操作量,输出表示制动踏板操作量bp的信号。
72.对于车轮的制动力(制动转矩)由制动致动器32进行控制。制动致动器32根据来自制动器ecu30的指示,调整向摩擦制动机构33的未图示的车轮刹车泵供给的油压,通过该油压对车轮刹车泵的制动压进行控制。由此,车轮刹车泵使得产生对于车轮的摩擦制动力。因此,制动器ecu30通过对制动致动器32进行控制,能够对车辆sv的制动力进行控制。
73.sbw ecu40连接于挡杆传感器41以及sbw致动器42。挡杆传感器41检测挡杆的位置。sbw ecu40从挡杆传感器41接受挡杆的位置,基于该挡杆的位置对sbw致动器42进行控制。sbw致动器42根据来自sbw ecu40的指示对挡位切换机构43进行控制,将变速器24的挡位切换为多个挡位中的一个。
74.在本例子中,挡位至少包括停车位置、空挡位置、前进位置以及后退位置,停车位置是不向驱动轮传递驱动力、且车辆被以机械的方式锁定于停止位置的位置,空挡位置是不向驱动轮传递驱动力、且车辆不被以机械的方式锁定于停止位置的的位置,前进位置是向驱动轮传递使车辆前进的驱动力的位置,后退位置是向驱动轮传递使车辆后退的驱动力的位置。
75.更具体而言,sbw ecu40在挡杆的位置为“p”时,对sbw致动器42进行驱动,对挡位切换机构43进行控制以使得变速器24的挡位成为停车位置。sbw ecu40在挡杆的位置为“n”时,对sbw致动器42进行驱动,对挡位切换机构43进行控制以使得变速器24的挡位成为空挡位置。sbw ecu40在挡杆的位置为“d”时,对sbw致动器42进行驱动,对挡位切换机构43进行控制以使得变速器24的挡位成为前进位置。进一步,sbw ecu40在挡杆的位置为“r”时,对sbw致动器42进行驱动,对挡位切换机构43进行控制以使得变速器24的挡位成为后退位置。
76.eps ecu50连接于辅助马达(m)51。辅助马达51组装于转向机构52。转向机构52是用于根据方向盘sw的旋转操作使转向轮进行转向的机构。转向机构52包括方向盘sw、连结于方向盘sw的转向轴us以及未图示的转向用齿轮机构等。eps ecu50通过设置于转向轴us的转向转矩传感器53,检测驾驶员输入到了方向盘sw的转向转矩,基于该转向转矩对辅助马达51进行驱动。eps ecu50通过该辅助马达51的驱动来对转向机构52提供转向转矩(转向辅助转矩),由此,能够对驾驶员的转向操作进行辅助。
77.而且,eps ecu50在执行以后说明的停车辅助控制的期间中经由can90从停车辅助ecu10接收到转向指令的情况下,基于由转向指令确定的转向转矩对辅助马达51进行驱动。该转向转矩与上述的转向辅助转矩不同,表示不需要驾驶员的转向操作而根据来自停车辅助ecu10的转向指令提供给转向机构52的转矩。通过该转矩,车辆sv的转向轮的舵角(即转向角)被变更。
78.导航ecu60具备接收用于对车辆sv位于的位置的“纬度和经度”进行检测的gps信号的gps接收机61、存储有地图信息的地图数据库62以及触摸面板63。导航ecu60基于车辆位于的位置的纬度和经度以及地图信息等进行各种运算处理,使触摸面板63显示车辆在地图上的位置。以下,将在触摸面板63显示“车辆在地图上的位置”时的显示模式称为“第1模式(导航模式)”。触摸面板63是触摸面板式显示器,能够进行地图和图像等的显示。
79.触摸面板63的显示模式在第1模式之外具有第2模式(停车辅助模式)。第2模式是进行停车辅助控制的情况下的显示模式,是如后述那样显示表示车辆的周边状况的各种图像的显示模式。当产生后述的辅助要求时,显示模式被从第1模式切换为第2模式。
80.停车辅助ecu10连接于环境传感器70。环境传感器70取得车辆周边信息。车辆周边信息包括关于存在于车辆周围的立体物的信息、和关于车辆周围的路面上的区划线的信息。立体物例如表示汽车、行人以及自行车等的移动物和护栏以及栅栏等的固定物。在以后中,这些立体物被简称为“物体”。环境传感器70包括多个超声波传感器71a~71h和多个摄像头72a~72d。多个超声波传感器71a~71h被总称为“超声波传感器71”。多个摄像头72a~72d被总称为“摄像头72”。此外,环境传感器70有时被称为“取得车辆周边信息的信息取得装置”。
81.超声波传感器71以脉冲状的方式向车辆sv周围的预定范围发送超声波,接收由物体反射了的反射波。超声波传感器71基于从超声波的发送到接收为止的时间,取得表示“所
发送的超声波被反射了的物体上的点即反射点”与“超声波传感器的距离”等的信息。超声波传感器71向停车辅助ecu10输出所取得的信息。
82.如图2所示,4个超声波传感器71a~71d在车宽方向上空开间隔而设置于车辆sv的前保险杠201。进一步,超声波传感器71e~71h在车宽方向上空开间隔而设置于车辆sv的后保险杠202。
83.摄像头72例如是内置ccd(charge coupled device,电荷耦合器件)或者cis(cmos image sensor,cmos图像传感器)的拍摄元件的数字摄像头。摄像头72以预定的帧速率输出车辆sv的周边区域的图像数据。摄像头72对车辆sv的周边状况(包括物体的位置和形状以及区划线的位置和形状。)进行拍摄,向停车辅助ecu10输出图像数据。
84.如图2所示,摄像头72a设置于前保险杠201的车宽方向的大致中央部,对车辆sv的前方区域进行拍摄。摄像头72b设置于车体200的后部的后备箱203的壁部,对车辆sv的后方区域进行拍摄。摄像头72c设置于右侧的后视镜204,对车辆sv的右侧方区域进行拍摄。摄像头72d设置于左侧的后视镜205,对车辆sv的左侧方区域进行拍摄。以后,有时将通过摄像头72a、72b、72c以及72d拍摄而得到的图像数据分别称为“前方图像数据”、“后方图像数据”、“右侧方图像数据”以及“左侧方图像数据”。
85.停车辅助ecu10每当经过预定时间(为了便于说明,以后也称为“第1时间”。)时,分别从超声波传感器71接受信息。停车辅助ecu10将该信息(即作为反射了超声波的点的反射点的位置)描绘于二维地图。该二维地图是以车辆sv的位置为原点、将车辆sv的行进方向作为了x轴、将车辆的左方向作为了y轴的俯视图。此外,“车辆的位置”是指车辆sv的俯视下的预定的几何学中心位置。停车辅助ecu10基于二维地图上的一群反射点所成的形状,检测位于车辆sv周围的物体,确定该物体相对于车辆sv的位置(距离和方位)以及形状。
86.此外,上述的“车辆的位置”也可以是车辆上的其他特定位置(例如左前轮和右前轮的俯视下的中央位置以及俯视下的左后轮和右后轮的中央位置等)。
87.进一步,停车辅助ecu10每当经过第1时间时,分别从摄像头72取得图像数据。停车辅助ecu10通过对来自摄像头72的图像数据进行解析来检测位于车辆sv周围的物体,确定该物体相对于车辆sv的位置(距离和方位)以及形状。停车辅助ecu10将基于图像数据确定(检测)的物体描绘于上述的二维地图。因此,停车辅助ecu10能够基于表示在了二维地图上的信息,对存在于车辆sv周围(距车辆sv的位置为预定距离范围内)的物体进行检测。
88.停车辅助ecu10基于表示在二维地图上的信息,检测车辆sv的周围且“不存在物体的区域”。停车辅助ecu10在不存在物体的区域为具有车辆sv能够移动的大小和形状的区域的情况下,将该区域决定为“能够出库区域(或者能够停车区域)”。
89.停车辅助ecu10还连接于车速传感器81、停车辅助开关82以及扬声器83。
90.车速传感器81检测车辆sv的速度(车速),输出表示该车速的信号。
91.停车辅助开关82是在驾驶员对停车辅助ecu10要求执行停车辅助控制时(使得产生后述的辅助要求时)被按下的开关。
92.扬声器83在接收到来自停车辅助ecu10的发声指令的情况下发出语音。
93.(画面显示)
94.接着,对在显示模式为第2模式的情况下显示于触摸面板63的画面(以后称为“辅助模式画面”。)进行说明。如图3所示,辅助模式画面具有第1显示区域301、第2显示区域302
以及第3显示区域303。
95.停车辅助ecu10在显示模式为第2模式的情况下使以下描述的“视点图像和行进方向图像”显示于辅助模式画面。以下,对视点图像和行进方向图像各自的生成方法进行简单的说明。
96.停车辅助ecu10基于从摄像头72取得的图像数据(前方图像数据、后方图像数据、右侧方图像数据以及左侧方图像数据),生成从所设定的假想视点观察了车辆sv和车辆sv的周边区域的图像(视点图像)。这样的生成视点图像的方法是周知的(参照日本特开2012-217000号公报和日本特开2013-021468号公报等。)。例如,视点图像是如从车辆sv的正上位置向下看车辆sv那样的图像。这样的视点图像也被称为“俯瞰图像”。
97.停车辅助ecu10基于前方图像数据和后方图像数据,生成对车辆sv的行进方向的区域进行显示的图像(行进方向图像)。在车辆sv前进的状况下,停车辅助ecu10基于前方图像数据,生成对车辆sv的前方区域进行表示的行进方向图像。另一方面,在车辆sv后退的状况下,停车辅助ecu10基于后方图像数据,生成对车辆sv的后方区域进行表示的行进方向图像。
98.如图3所示,停车辅助ecu10使第1显示区域301显示俯瞰图像401,并且,使第2显示区域302显示行进方向图像402。
99.(停车辅助控制的内容)
100.停车辅助ecu10检测挡杆的位置和对于停车辅助开关82的操作,选择出库模式、并列停车模式以及纵列停车模式中的任一辅助模式。
101.出库模式是使停车了的车辆向行驶道路移动时进行辅助的模式。并列停车模式是使车辆并列停车时进行辅助的模式。并列停车的含义与相对于行驶道路的行进方向使车辆在直角方向上停车相同。纵列停车模式是使自身车辆进行纵列停车时进行辅助的模式。纵列停车的含义与以车辆成为与行驶道路的行进方向平行的方式使车辆停车相同。并列停车模式和纵列停车模式不直接关联于本实施方式的特征,因此,省略这些模式的说明。
102.例如,若在挡杆的位置为“p”的状况下停车辅助开关82被按下一次,则停车辅助ecu10选择出库模式来作为辅助模式。
103.在选择了出库模式的情况下,停车辅助ecu10将目标区域设定在能够出库区域内。目标区域是在车辆sv的出库已完成时车体200所占有的区域。进一步,停车辅助ecu10将车辆sv移动至了该目标区域的情况下的车辆的位置设定为目标位置。在此的目标位置是指车辆sv的俯视下的前述的中心位置应该到达的位置。此外,在本说明书和权利要求书中,有时将“使车辆的中心位置向目标位置或者预定位置移动”仅表达为“使车辆向目标位置或者预定位置移动”。
104.停车辅助ecu10运算使车辆sv从当前位置移动到目标位置的移动路径。移动路径是车体200能够一边相对于物体(其他车辆、路缘石以及护栏等)空开预定间隔、一边使车辆sv的中心位置从当前位置移动到目标位置的路径。此外,移动路径可以通过各种各样的已知的运算方法之一(例如日本特开2015-3565号公报所提出的方法)来进行运算。
105.当移动路径被决定时,停车辅助ecu10决定用于使车辆sv沿着该移动路径进行移动的移动辅助信息。移动辅助信息包括车辆sv的移动方向(具体而言为变速器24的挡位)、转向角模式(转向角信息)以及速度模式(速度信息)。
106.停车辅助ecu10根据所决定的挡位,经由can90对sbw ecu40发送挡位控制指令。sbw ecu40在从停车辅助ecu10接收到挡位控制指令的情况下,对sbw致动器42进行驱动,将变速器24的挡位变更为由挡位控制指令确定的位置(即执行挡位控制。)。
107.转向角模式是使移动路径上的车辆sv的中心位置和转向角进行了关联的数据,表示车辆sv的中心位置沿着移动路径移动时的转向角(目标转向角)的变化。停车辅助ecu10根据所决定的转向角模式,经由can90对eps ecu50发送转向指令(包括目标转向角)。eps ecu50在从停车辅助ecu10接收到转向指令的情况下,基于由转向指令确定的转向转矩,对辅助马达51进行驱动,使实际的转向角与目标转向角一致(即执行转向角控制。)。
108.速度模式是使移动路径上的车辆sv的中心位置和行驶速度进行了关联的数据,表示车辆sv的中心位置沿着移动路径移动时的车速(车速的目标值)的变化。停车辅助ecu10根据所决定的速度模式,经由can90对发动机ecu20发送驱动力控制指令。发动机ecu20在从停车辅助ecu10接收到驱动力控制指令的情况下,根据驱动力控制指令对发动机致动器22进行控制(即执行驱动力控制)。进一步,停车辅助ecu10根据所决定的速度模式,经由can90对制动器ecu30发送制动力控制指令。制动器ecu30在从停车辅助ecu10接收到制动力控制指令的情况下,根据制动力控制指令对制动致动器32进行控制(即执行制动力控制)。
109.(辅助要求)
110.如以下描述的那样,停车辅助ecu10检测对于停车辅助开关82的操作、挡位以及车辆sv的周边状况,判定是否产生了出库辅助要求。以下,出库辅助要求被简称为“辅助要求”。
111.当以下的条件a1~条件a4全部成立时,停车辅助ecu10判定为产生了辅助要求。
112.(条件a1)尚未产生辅助要求。
113.(条件a2)选择了出库模式。即,在挡位为停车位置(p)的状况下,停车辅助开关82被按下了一次。
114.(条件a3)条件a2成立的时间点的车速为预定的停止判断车速(例如0[km/h])。
[0115]
(条件a4)检测到与车辆sv停车的区域相邻的行驶道路内的区域、且车辆sv能够存在的大小和形状的区域(能够出库区域)。
[0116]
停车辅助ecu10在产生了辅助要求的情况下以出库模式执行停车辅助控制。
[0117]
(工作的概要)
[0118]
在本例子中,停车辅助ecu10根据车辆sv的周边状况,对车辆sv在车辆sv按照移动路径进行移动的期间停止的次数(以下简称为“停止次数”。)进行变更。以下,对具体的处理流程进行说明。
[0119]
在图4的例子中,车辆sv停着车(车速为零,且挡位为停车位置(p))。在车辆sv的左侧存在其他车辆ob1。新一步,在车辆sv的右侧存在墙壁ob2。
[0120]
车辆sv的驾驶员为了使车辆sv移动至行驶道路rd,按下一次停车辅助开关82。停车辅助ecu10在行驶道路rd内检测到能够出库区域。上述的条件a1~条件a4成立,因此,停车辅助ecu10判定为产生了辅助要求。
[0121]
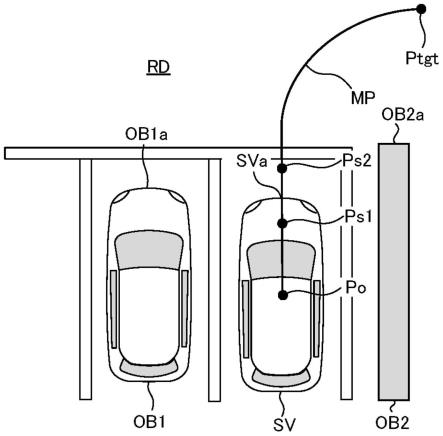
停车辅助ecu10将目标区域atgt设定在能够出库区域内。停车辅助ecu10将车辆sv移动到了目标区域atgt的情况下的车辆sv的位置设定为目标位置ptgt。进一步,停车辅助ecu10运算使车辆sv从当前位置po移动到目标位置ptgt的移动路径mp。
[0122]
停车辅助ecu10在二维地图上判定在车辆sv左侧的预定的第1区域rd1内是否存在物体。第1区域rd1的x轴方向上的长度和y轴方向上的长度被设定为包含具有典型尺寸的1台车辆。在本例子中,停车辅助ecu10检测到第1区域rd1内的其他车辆ob1。在以后中,将在第1区域rd1内检测到的物体(其他车辆)ob1称为“第1物体ob1”。
[0123]
停车辅助ecu10在二维地图上判定在车辆sv右侧的预定的第2区域rd2内是否存在物体。第2区域rd2的x轴方向上的长度和y轴方向上的长度被设定为与第1区域rd1相同。在本例子中,停车辅助ecu10检测到第2区域rd2内的壁ob2。在以后中,将在第2区域rd2内检测到的物体(墙壁)ob2称为“第2物体ob2”。
[0124]
在以后中,将车辆sv的行驶道路rd侧的端部sva记载为“车辆端部sva”,将第1物体ob1的行驶道路rd侧的端部ob1a记载为“第1端部ob1a”,将第2物体ob2的行驶道路rd侧的端部ob2a记载为“第2端部ob2a”。
[0125]
停车辅助ecu10运算与车辆端部sva、第1端部ob1a以及第2端部ob2a之间的位置关系有关的信息。停车辅助ecu10基于与该位置关系有关的信息,变更(设定)停止次数。
[0126]
更具体而言,如图5所示,停车辅助ecu10运算第1距离d1、第2距离d2以及第3距离d3来作为与位置关系有关的信息。
[0127]
第1距离d1是车辆端部sva与第1端部ob1a之间的车辆sv的前后方向上的距离。如图5所示,在第1端部ob1a位于比车辆端部sva靠行驶道路rd侧的位置的情况下,停车辅助ecu10将第1距离d1作为负值来进行运算。与此相对,在车辆端部sva位于比第1端部ob1a靠行驶道路rd侧的位置的情况下,停车辅助ecu10将第1距离d1作为正值来进行运算。
[0128]
第2距离d2是车辆端部sva与第2端部ob2a之间的车辆sv的前后方向上的距离。如图5所示,在第2端部ob2a位于比车辆端部sva靠行驶道路rd侧的位置的情况下,停车辅助ecu10将第2距离d2作为负值来进行运算。与此相对,在车辆端部sva位于比第2端部ob2a靠行驶道路rd侧的位置的情况下,停车辅助ecu10将第2距离d2作为正值来进行运算。
[0129]
第3距离d3是第1端部ob1a与第2端部ob2a之间的车辆sv的前后方向上的距离(≥0)。
[0130]
停车辅助ecu10基于第1距离d1、第2距离d2以及第3距离d3,判定当前的状况(开始停车辅助控制的时间点的状况)为第1状况、第2状况以及第3状况中的哪个状况。以下,这样的处理有时被称为“状况判定处理”。对于第1状况、第2状况以及第3状况各自的详细,将后面进行描述。
[0131]
停车辅助ecu10在判定为当前的状况为第1状况的情况下,将停止次数设定为2次。停车辅助ecu10在判定为当前的状况为第2状况的情况下,将停止次数设定为1次。停车辅助ecu10在判定为当前的状况为第3状况的情况下,将停止次数设定为零(即停车辅助ecu10不使车辆sv停止)。
[0132]
以下,对分别用于判定第1状况、第2状况以及第3状况的条件进行具体的说明。
[0133]
(第1状况)
[0134]
如图6所示,在车辆sv位于当前位置po的情况下,第1物体ob1妨碍从车辆sv看的视野。在此,“从车辆看的视野”是指能够从车辆sv确认的行驶道路rd的范围,在本例子中,意味着能够由驾驶员看到的行驶道路rd的范围。此外,如后述的那样,“从车辆看的视野”也可以是能够从摄像头72看到的行驶道路rd的范围。
[0135]
驾驶员的视野被第1物体ob1妨碍,因此,驾驶员无法确认(察觉)在行驶道路rd上移动且从车辆sv的左侧向车辆sv接近过来的物体(行人)ob3。在以后中,将物体ob3记载为“第3物体ob3”。
[0136]
进一步,第2物体ob2妨碍驾驶员的视野。驾驶员无法确认(察觉)在行驶道路rd上移动且从车辆sv的右侧向车辆sv接近过来的物体(行人)ob4。在以后中,将物体ob4记载为“第4物体ob4”。
[0137]
如图6所示,假定为车辆sv在移动路径mp上移动、第1距离d1成为了预定的正的距离ds(参照点线sv’)。距离ds被设定为第1物体ob1对于驾驶员的视野不会成为妨碍的程度的值。在该情况下,驾驶员能够确认第3物体ob3。
[0138]
但是,在本例子中,第1端部ob1a的车辆sv的前后方向上的位置与第2端部ob2a的车辆sv的前后方向上的位置之间存在较大的偏离。即,第3距离d3大。即使为车辆sv在第1距离d1成为距离ds的时间点进行了停止,第2物体ob2也依然会妨碍驾驶员的视野(右侧的视野)。在该时间点,驾驶员也难以确认第4物体ob4。
[0139]
如图7所示,假定为车辆sv在移动路径mp上进一步移动、第2距离d2成为了距离ds(参照点线sv”)。在该情况下,驾驶员能够确认第4物体ob4。这样,在图5的例子中,通过两次的车辆sv的停止,驾驶员能够确认行驶道路rd的状况。
[0140]
对上述进行考虑,停车辅助ecu10在以下的条件b1~条件b3全部成立的情况下,判定为当前的状况为第1状况。
[0141]
(条件b1)停车辅助ecu10在第1区域rd1内检测到第1物体ob1,并且,在第2区域rd2内检测到第2物体ob2。
[0142]
(条件b2)第1距离d1小于预定的第1阈值dth1,并且,第2距离d2小于第1阈值dth1。该条件b2是用于判定第1物体ob1和第2物体ob2这两方是否妨碍从车辆sv看的视野(驾驶员的视野)的条件。第1阈值dth1例如为零以下的值。此外,第1阈值dth1也可以根据车辆的种类来进行变更。例如关于驾驶员的座位与车辆端部sva之间的长度大的车辆,第1阈值dth1也可以被设定为正值。
[0143]
(条件b3)第3距离d3比预定的正的第2阈值dth2大。
[0144]
如上所述,第1状况包括第1物体ob1和第2物体ob2这两方妨碍驾驶员的视野、且第3距离d3比第2阈值dth2大的状况。
[0145]
停车辅助ecu10在判定为当前的状况为第1状况的情况下,如图8所示,在移动路径mp上设定第1停止位置ps1和第2停止位置ps2。第1停止位置ps1是第1距离d1成为距离ds的位置(参照图6)。第2停止位置ps2是第2距离d2成为距离ds的位置(参照图7)。停车辅助ecu10运算速度模式,以使得车辆sv在第1停止位置ps1停止、且车辆sv在第2停止位置ps2停止。
[0146]
(第2状况)
[0147]
图9是表示了第2状况的一个例子的图。在本例子中,在车辆sv的左侧存在第1物体ob1,在车辆sv的右侧存在第2物体ob2。此外,第1端部ob1a比第2端部ob2a稍微靠近行驶道路rd。
[0148]
如图所示,第1端部ob1a的车辆sv的前后方向上的位置与第2端部ob2a的车辆sv的前后方向上的位置之间的偏离小。即,第3距离d3(省略图示)为第2阈值dth2以下。在该状况
下,如图10所示,假定为车辆sv在移动路径mp上移动、第1距离d1成为了距离ds。在该时间点,第1物体ob1和第2物体ob2这两方不成为对于驾驶员的视野的妨碍,因此,驾驶员能够确认第3物体ob3和第4物体ob4这两方。这样,在图9的例子中,通过一次的车辆sv的停止,驾驶员能够确认行驶道路rd的状况。
[0149]
对上述进行考虑,停车辅助ecu10在以下的条件c1~条件c3全部成立的情况下,判定为当前的状况为第2状况。
[0150]
(条件c1)停车辅助ecu10在第1区域rd1内检测到第1物体ob1,并且,在第2区域rd2内检测到第2物体ob2。
[0151]
(条件c2)第1距离d1小于第1阈值dth1,并且,第2距离d2小于第1阈值dth1。
[0152]
(条件c3)第3距离d3为第2阈值dth2以下。
[0153]
停车辅助ecu10在判定为当前的状况为第2状况的情况下,选择第1物体ob1和第2物体ob2中的更靠近行驶道路rd的物体(以下称为“对象物体”。)。在本例子中,对象物体为第1物体ob1。停车辅助ecu10在移动路径mp上设定第1停止位置ps1。如图10所示,第1停止位置ps1是对象物体的端部(即ob1a)与车辆端部sva之间的距离(即第1距离d1)成为距离ds的位置。停车辅助ecu10运算速度模式以使得车辆sv在第1停止位置ps1停止。
[0154]
进一步,在图11的例子中,在车辆sv位于当前位置po的情况下,第2物体ob2不妨碍驾驶员的视野。驾驶员能够确认第4物体ob4。仅第1物体ob1妨碍驾驶员的视野。在该状况下,驾驶员也能够通过一次的车辆sv的停止来确认行驶道路rd的状况。
[0155]
对上述进行考虑,停车辅助ecu10在以下的条件d1和条件d2这两方成立的情况下,判定为当前的状况为第2状况。
[0156]
(条件d1)停车辅助ecu10在第1区域rd1内检测到第1物体ob1,并且,在第2区域rd2内检测到第2物体ob2。
[0157]
(条件d2)第1距离d1和第2距离d2中的一方小于第1阈值dth1,并且,另一方为第1阈值dth1以上。该条件d2是用于判定是否仅第1物体ob1和第2物体ob2中的一方妨碍驾驶员的视野的条件。
[0158]
如前述同样地,停车辅助ecu10在移动路径mp上设定第1停止位置ps1。第1停止位置ps1是第1距离d1成为距离ds的位置。停车辅助ecu10运算速度模式以使得车辆sv在第1停止位置ps1停止。
[0159]
进一步,在图12的例子中,仅存在第1物体ob1,第1物体ob1妨碍驾驶员的视野。在该状况下,驾驶员也能够通过一次的车辆sv的停止来确认行驶道路rd的状况。
[0160]
对上述进行考虑,停车辅助ecu10在以下的条件e1和条件e2这两方成立的情况下,判定为当前的状况为第2状况。停车辅助ecu10在移动路径mp上设定第1停止位置ps1。第1停止位置ps1是第1距离d1成为距离ds的位置。
[0161]
(条件e1)停车辅助ecu10在第1区域rd1内检测到第1物体ob1,并且,在第2区域rd2内未检测到物体。
[0162]
(条件e2)第1距离d1小于第1阈值dth1。
[0163]
进一步,停车辅助ecu10在以下的条件f1和条件f2这两方成立的情况下,判定为当前的状况为第2状况。停车辅助ecu10在移动路径mp上设定第2停止位置ps2。第2停止位置ps2是第2距离d2成为距离ds的位置。
[0164]
(条件f1)停车辅助ecu10在第1区域rd1内未检测到物体,并且,在第2区域rd2内检测到第2物体ob2。
[0165]
(条件f2)第2距离d2小于第1阈值dth1。
[0166]
如上所述,第2状况包括(a)第1物体ob1和第2物体ob2这两方妨碍驾驶员的视野、且第3距离d3为第2阈值dth2以下的状况和(b)仅第1物体ob1或者仅第2物体ob2妨碍驾驶员的视野的状况。
[0167]
(第3状况)
[0168]
停车辅助ecu10在当前的状况不属于第1状况和第2状况中的任何状况的情况下,判定为当前的状况为第3状况。
[0169]
图13是表示了第3状况的一个例子的图。存在第1物体ob1,并且,存在第2物体ob2。但是,第1距离d1和第2距离d2均为比较大的正值。第1物体ob1和第2物体ob2这两方没有妨碍驾驶员的视野,因此,驾驶员能够确认第3物体ob3和第4物体ob4这两方。在该状况下,认为不需要对驾驶员提供确认行驶道路的状况的机会。这样,第3状况包括第1物体ob1和第2物体ob2这两方没有妨碍驾驶员的视野的状况。
[0170]
停车辅助ecu10在图13的状况下判定为当前的状况为第3状况。停车辅助ecu10运算速度模式以使得车辆sv不停止。
[0171]
图14是表示了第3状况的其他例子的图。在第1区域rd1和第2区域rd2中不存在物体。驾驶员能够确认第3物体ob3和第4物体ob4这两方。停车辅助ecu10在图14的状况下也判定为当前的状况为第3状况。并且,停车辅助ecu10运算速度模式以使得车辆sv不停止。
[0172]
(自动停止处理)
[0173]
停车辅助ecu10在使车辆sv停止在了第1停止位置ps1(或者第2停止位置ps2)的情况下,中断(暂时停止)停车辅助控制。停车辅助ecu10在中断了停车辅助控制以后,执行用于维持车辆sv的停止状态的自动停止处理。停车辅助ecu10通过对制动器ecu30发送制动力控制指令,使得产生制动力,维持车辆sv的停止状态。
[0174]
(重新开始操作)
[0175]
停车辅助ecu10在中断停车辅助控制并开始了自动停止处理以后,对驾驶员要求预定的重新开始操作。重新开始操作是用于使停车辅助控制重新开始的操作,在本例子中是对于制动踏板31a的操作。
[0176]
具体而言,如图15所示,停车辅助ecu10使要求“踩下制动踏板31a”之意的消息1501显示于辅助模式画面的第3显示区域303,并且,使扬声器83进行消息1501的发声。
[0177]
停车辅助ecu10基于制动踏板操作量bp判定制动踏板31a是否被进行了踩踏。在制动踏板31a被进行了踩踏的情况下,停车辅助ecu10对驾驶员要求释放制动踏板31a。具体而言,如图16所示,停车辅助ecu10使要求“让脚离开制动踏板31a”之意的消息1601显示于辅助模式画面的第3显示区域303,并且,使扬声器83进行该消息1601的发声。
[0178]
然后,停车辅助ecu10基于制动踏板操作量bp,判定制动踏板31a是否已被释放。在制动踏板31a已被释放的情况下,停车辅助ecu10解除自动停止处理,重新开始停车辅助控制。
[0179]
(出库辅助的工作)
[0180]
接着,对执行出库模式下的停车辅助控制(以下有时简称为“出库辅助”。)时的流
程进行说明。停车辅助ecu10的cpu10a(以下简称为“cpu”。)每当经过预定时间(第1时间)时,分别执行图17~图20所示的例程。
[0181]
进一步,cpu通过每当经过第1时间时执行未图示的例程,从环境传感器70取得车辆周边信息,基于车辆周边信息对上述的二维地图进行更新。
[0182]
而且,cpu在车辆sv的未图示的点火钥匙开关(启动开关)被从断开(off)位置变更为了接通(on)位置时,执行未图示的初始化例程,将以下描述的各种标志(x1和x2)的值设定为“0”。
[0183]
当成为预定的定时时,cpu从图17的步骤1700开始处理而进入步骤1701,判定第1标志x1的值是否为“0”。第1标志x1在其值为“0”时表示未产生辅助要求(即出库辅助要求),在其值为“1”时表示产生了辅助要求。换言之,cpu在步骤1701中判定上述条件a1是否成立。在第1标志x1的值不为“0”的情况下,cpu在步骤1701中判定为“否”而直接进入步骤1795,结束本例程。
[0184]
现在,当假定为第1标志x1的值为“0”时,cpu在步骤1701中判定为“是”而进入步骤1702,判定上述条件a2~条件a4是否成立。在条件a2~条件a4中的至少一个不成立的情况下,cpu在步骤1702中判定为“否”而直接进入步骤1795,结束本例程。
[0185]
与此相对,在件a2~条件a4已成立的情况下,cpu在步骤1702中判定为“是”而进入步骤1703,判定是否进行了预定的开始操作。cpu在触摸面板63显示用于选择车辆sv的行进方向(即右方向或者左方向)的第1按钮和用于开始出库辅助的第2按钮。开始操作包括对于第1按钮的操作和对于第2按钮的操作。在不进行开始操作的情况下,cpu在步骤1703中判定为“否”而直接进入步骤1795,结束本例程。
[0186]
在进行了开始操作的情况下,cpu在步骤1703中判定为“是”,依次进行以下描述的步骤1704~步骤1708的处理,进入步骤1709。
[0187]
步骤1704:cpu将显示于触摸面板63的画面的显示模式从第1模式切换为第2模式。因此,在触摸面板63显示辅助模式画面。
[0188]
步骤1705:cpu将目标区域atgt设定在能够出库区域内。进一步,cpu将使车辆sv移动到了目标区域atgt的情况下的车辆sv的中心位置设定为目标位置ptgt。cpu运算使车辆sv的位置从当前位置(开始位置)po移动到目标位置ptgt的移动路径mp。
[0189]
步骤1706:cpu决定车辆sv的移动方向(具体而言为挡位)。
[0190]
步骤1707:cpu运算用于使车辆sv沿着移动路径mp进行移动的转向角模式。
[0191]
步骤1708:cpu如前述的那样执行状况判定处理。cpu基于车辆周边信息(更具体而言为二维地图),判定当前的状况属于第1状况、第2状况以及第3状况中的哪个状况。
[0192]
当cpu进入步骤1709时,cpu判定当前的状况(在步骤1708中判定的状况)是否为第1状况或者第2状况。在当前的状况为第1状况或者第2状况的情况下,cpu在步骤1709中判定为“是”而依次进行以下描述的步骤1710~步骤1712的处理。然后,cpu进入步骤1795,结束本例程。
[0193]
步骤1710:cpu根据在步骤1708中判定的状况,在移动路径mp上设定一个或者两个停止位置。在当前的状况为第1状况的情况下,cpu如前述的那样在移动路径mp上设定第1停止位置ps1和第2停止位置ps2。在当前的状况为第2状况的情况下,cpu如前述的那样在移动路径mp上设定第1停止位置ps1。
[0194]
步骤1711:cpu如前述的那样运算速度模式。
[0195]
步骤1712:cpu将第1标志x1的值设定为“1”。
[0196]
进一步,当成为预定的定时时,cpu从图18的例程的步骤1800开始处理而进入步骤1801,判定是否第1标志x1的值为“1”、且第2标志x2的值为“0”。第2标志x2在其值为“0”时表示停车辅助控制未被中断(暂时停止),在其值为“1”时表示停车辅助控制被中断。在第1标志x1的值为“0”或者第2标志x2的值为“1”的情况下,cpu在步骤1801中判定为“否”,直接进入步骤1895而结束本例程。
[0197]
与此相对,在第1标志x1的值为“1”、且第2标志x2的值为“0”的情况下,cpu在步骤1801中判定为“是”而进入步骤1802,判定在图17的步骤1708中判定的状况是否为第1状况或者第2状况。在步骤1708中判定的状况为第3状况的情况下,cpu在步骤1802中判定为“否”而直接进入步骤1804,执行停车辅助控制。具体而言,cpu通过按照所决定的挡位向sbw ecu40发送挡位控制指令,从而执行挡位控制。cpu通过按照转向角模式向eps ecu50发送转向指令(包括目标转向角),从而执行转向角控制。cpu通过按照速度模式对发动机ecu20发送驱动力控制指令,从而执行驱动力控制。进一步,cpu通过按照速度模式对制动器ecu30发送制动力控制指令,从而执行制动力控制。因此,驾驶员不进行驾驶操作(挡杆、方向盘sw、加速踏板21a以及制动踏板31a的操作),就能够使车辆sv的中心位置移动至行驶道路rd内的目标位置ptgt。然后,cpu进入步骤1895,结束本例程。
[0198]
此外,在执行停车辅助控制的期间中驾驶员通过对制动踏板31a进行操作来要求了大的制动力的情况下,cpu可以对制动致动器32进行控制以使得产生与该要求相应的制动力。在该情况下,cpu可以通过对发动机致动器22进行控制来将驱动力设定为零。
[0199]
与此相对,在步骤1708中判定的状况为第1状况或者第2状况的情况下,cpu在步骤1802中判定为“是”而进入步骤1803,判定车辆sv是否到达了停止位置(第1停止位置ps1或者第2停止位置ps2)。在车辆sv未到达停止位置的情况下,cpu在步骤1803中判定为“否”而进入步骤1804,执行停车辅助控制。
[0200]
假定为cpu反复执行图18的例程(即反复执行步骤1804的处理)而车辆sv到达了停止位置。在该情况下,当cpu进入步骤1803时,cpu判定为“是”,依次进行以下描述的步骤1805和步骤1806的处理。然后,cpu进入步骤1895,结束本例程。
[0201]
步骤1805:cpu如前述的那样执行自动停止处理。
[0202]
步骤1806:cpu将第2标志x2的值设定为“1”。由此,cpu在步骤1801中判定为“否”,因此,停车辅助控制被中断。
[0203]
进一步,当成为预定的定时时,cpu从图19的例程的步骤1900开始处理而进入步骤1901,判定第2标志x2的值是否为“1”。在第2标志x2的值不为“1”的情况下,cpu在步骤1901中判定为“否”,直接进入步骤1995而结束本例程。
[0204]
与此相对,假定为第2标志x2的值在图18的例程中被设定为“1”,停车辅助控制已被中断。在该情况下,cpu在步骤1901中判定为“是”而进入步骤1902,要求重新开始操作(制动踏板31a的操作)。如图15所示,cpu使消息1501显示于辅助模式画面的第3显示区域303,并且,使扬声器83进行该消息的发声。
[0205]
接着,cpu在步骤1903中判定驾驶员是否踩下了制动踏板31a。在驾驶员踩下了制动踏板31a的情况下,cpu在该步骤1903中判定为“是”而进入步骤1904,对驾驶员要求制动
踏板31a的释放。如图16所示,cpu使消息1601显示于辅助模式画面的第3显示区域303,并且,使扬声器83进行该消息的发声。
[0206]
接着,cpu在步骤1905中判定制动踏板31a是否已被释放。在制动踏板31a未被释放的情况下,cpu返回步骤1904的处理。
[0207]
与此相对,在制动踏板31a已被释放的情况下,cpu在该步骤1905中判定为“是”,依次进行以下描述的步骤1906和步骤1907的处理。然后,cpu进入步骤1995,结束本例程。
[0208]
步骤1906:cpu解除自动停止处理。
[0209]
步骤1907:cpu将第2标志x2的值设定为“0”。由此,cpu在图18的例程的步骤1801中判定为“是”,因此,停车辅助控制被重新开始。
[0210]
此外,在cpu进入到了步骤1903的时间点驾驶员未踩下制动踏板31a的情况下,cpu在该步骤1903中判定为“否”而进入步骤1908。cpu判定预定的中止条件(取消条件)是否成立。中止条件在从第一次执行了步骤1902的处理的时间点起的经过时间etm1成为了预定的第1时间阈值tm1以上时成立。在中止条件未成立的情况下,cpu在该步骤1908中判定为“否”而返回步骤1902。
[0211]
在中止条件成立的情况下,cpu在步骤1908中判定为“是”,依次进行以下描述的步骤1909~步骤1911的处理。然后,cpu进入步骤1995而结束本例程。
[0212]
步骤1909:cpu解除自动停止处理。
[0213]
步骤1910:cpu执行预定的结束处理。具体而言,cpu使“出库辅助(即基于出库模式的停车辅助控制)已结束”之意的消息显示于辅助模式画面的第3显示区域303,并且,使扬声器83进行该消息的发声。
[0214]
步骤1911:cpu将第1标志x1的值设定为“0”,并且,将第2标志x2的值设定为“0”。这样,在驾驶员未进行重新开始操作的情况下,使停车辅助控制结束。
[0215]
进一步,当成为预定的定时时,cpu从图20的例程的步骤2000开始处理而进入步骤2001,判定是否第1标志x1的值为“1”、且第2标志x2的值为“0”。在第1标志x1的值为“0”或者第2标志x2的值为“1”的情况下,cpu在步骤2001中判定为“否”,直接进入步骤2095而结束本例程。
[0216]
与此相对,在第1标志x1的值为“1”且第2标志x2的值为“0”的情况下,cpu在步骤2001中判定为“是”而进入步骤2002,判定车辆sv的中心位置是否到达了目标位置ptgt。在车辆sv的中心位置未到达目标位置ptgt的情况下,cpu在步骤2002中判定为“否”,直接进入步骤2095而结束本例程。
[0217]
假定为车辆sv的中心位置到达了目标位置ptgt。在该情况下,cpu在步骤2002中判定为“是”,依次进行以下描述的步骤2003和步骤2004的处理。然后,cpu进入步骤2095而结束本例程。
[0218]
步骤2003:cpu执行预定的结束处理。具体而言,cpu使“出库辅助已结束”之意的消息显示于辅助模式画面的第3显示区域303,并且,使扬声器83进行该消息的发声。
[0219]
步骤2004:cpu将第1标志x1的值设定为“0”。
[0220]
根据上述构成,停车辅助装置根据车辆sv的周边状况,在零~两次的范围内对车辆sv在车辆sv按照移动路径mp进行移动的期间停止的次数进行变更。能够一边对驾驶员提供使之确认行驶道路rd的状况的机会,一边降低驾驶员感到麻烦的可能性。
[0221]
在第1状况下,停车辅助装置使车辆sv停止2次。进一步,停车辅助装置在车辆端部sva到达了比第1端部ob1a靠前距离ds的位置时使车辆sv停止,在车辆端部sva到达了比第2端部ob2a靠前距离ds的位置时使车辆sv停止。因此,驾驶员能够切实地确认行驶道路rd内的状况。
[0222]
在第2状况下,停车辅助装置使车辆sv在驾驶员能够确认从左侧和右侧接近的其他物体(ob3和ob4)的位置仅停止1次。即使是一次的停止,驾驶员也能够充分地确认行驶道路rd内的状况。能够一边对驾驶员提供使之确认行驶道路rd的状况的机会,一边降低驾驶员感到麻烦的可能性。
[0223]
在第3状况下,在开始停车辅助控制的时间点,驾驶员能够充分地确认行驶道路rd内的状况。因此,停车辅助装置不使车辆sv停止。因此,能够降低驾驶员感到麻烦的可能性。
[0224]
此外,本公开不限定于上述实施方式,可以在本发明的范围内采用各种变形例。
[0225]
(变形例1)
[0226]
在上述实施方式中,cpu在停车辅助控制的开始前的时间点(步骤1710)在移动路径mp上设定了停止位置,但不限定于此。cpu也可以在开始了停车辅助控制之后基于车辆周边信息来设定第1停止位置ps1和第2停止位置ps2。
[0227]
(变形例2)
[0228]
停车辅助ecu10也可以考虑能够从摄像头72(例如摄像头72a)看到的行驶道路rd的范围(以下称为“摄像头72的视野范围”。),设定停止次数和停止位置。在该构成中,停车辅助ecu10也可以在使车辆sv停止在了停止位置(ps1、ps2)的时间点,使驾驶员确认辅助模式画面上的俯瞰图像401和行进方向图像402。距离ds可以被设定为摄像头72的视野范围不被第1物体ob1(或者第2物体ob2)妨碍的程度。根据该构成,能够将距离ds设定为比使驾驶员用自身的视野确认行驶道路rd的状况的情况下的该距离ds小的值。能够进一步提高安全性。
[0229]
(变形例3)
[0230]
重新开始操作不限定于上述的例子,也可以是其他操作。重新开始操作也可以是对于设置在方向盘sw附近的开关的操作。重新开始操作也可以是对于显示在了触摸面板63上的按钮的操作。进一步,重新开始操作也可以是对于停车辅助开关82的操作。
[0231]
(变形例4)
[0232]
停车辅助控制至少包括转向角控制、驱动力控制以及制动力控制即可。即,停车辅助控制也可以不包括挡位控制。在停车辅助控制不包括挡位控制的情况下,cpu在图17的例程的步骤1711之后,经由触摸面板63上的辅助模式画面以及/或者扬声器83,对驾驶员报知变速器24的挡位。并且,当驾驶员操作挡杆来使挡位与上述报知了的挡位一致时,cpu进入步骤1712,将第1标志x1的值设定为“1”。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1