无人驾驶汽车的雷达安装架的制作方法
1.本实用新型属于无人驾驶汽车技术领域,特别是涉及一种无人驾驶汽车的雷达安装架。
背景技术:
2.无人驾驶的汽车雷达是用于发射激光束探测目标的位置、速度等特征量的雷达系统其工作原理是向目标发射探测信号,然后将接收到的从目标反射回来的信号与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数。
3.现有技术中的无人驾驶汽车雷达,与车体上的安装架为一体型,安装雷达时步骤较为繁琐,费时费力。
技术实现要素:
4.本实用新型的目的在于提供一种无人驾驶汽车的雷达安装架,解决现有技术中的无人驾驶汽车雷达安装繁琐,费时费力的技术问题。
5.为达上述目的,本实用新型是通过以下技术方案实现的:
6.一种无人驾驶汽车的雷达安装架,包括雷达本体、装设在所述雷达本体下侧的底座、与所述底座相配合的固定桶,所述固定桶内部开设有内腔,所述内腔内部转动配合有传动筒,所述传动筒与所述内腔之间装设有扭簧;
7.所述底座周侧开设有多个插槽,所述固定桶内壁下部开设有与所述内腔相连通的多个槽口,所述槽口内滑动配合有与所述插槽和所述传动筒相配合的插杆,所述固定桶底部内壁弹性配合有与所述传动筒相配合的限位组件。
8.可选的,所述固定桶内壁上部开设有与所述内腔相连通的多个通孔,所述通孔内滑动配合有与所述传动筒相配合的固定杆。
9.可选的,所述固定桶底部开设有与所述内腔相连通的第一腔室,所述限位组件弹性配合在所述第一腔室内。
10.可选的,所述限位组件包括压块、装设在所述压块且伸入所述固定桶内部周侧的连接杆、装设在所述连接杆上侧端部与所述传动筒相配合的卡接杆。
11.可选的,所述传动筒包括转筒、分别装设在所述转筒上部周侧和下部周侧的平面齿轮,位于转筒下部周侧的所述平面齿轮下侧开设有与所述卡接杆相卡接的卡槽。
12.可选的,所述固定桶的内部一侧开设有与所述内腔相连通的第二腔室,所述第二腔室内转动配合有与所述传动筒相啮合的齿轮,所述固定桶的外部周侧开设有与所述第二腔室相连通的圆孔,所述圆孔内转动配合有与所述齿轮固定连接的转杆。
13.本实用新型的实施例具有以下有益效果:
14.本实用新型的一个实施例通过设置的底座和固定桶,能在用户安装雷达本体时,通过限位组件解除传动筒的限位,传动筒通过扭簧带动多个插杆插入插槽内,实现了对雷
达本体的快速安装。
15.当然,实施本实用新型的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
16.构成本技术的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
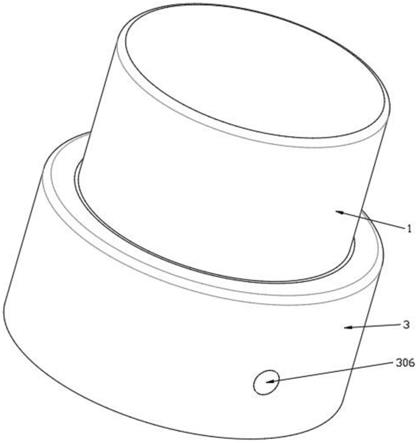
17.图1为本实用新型一实施例的雷达安装架立体结构示意图;
18.图2为本实用新型一实施例的底座立体结构示意图;
19.图3为本实用新型一实施例的固定桶立体结构示意图;
20.图4为本实用新型一实施例的固定桶侧面剖视结构示意图;
21.图5为本实用新型一实施例的雷达安装架侧面剖视结构示意图;
22.图6为图4中a处结构示意图;
23.图7为图4中b处结构示意图;
24.图8为图4中c处结构示意图。
25.其中,上述附图包括以下附图标记:
26.雷达本体1,底座2,插槽201,定位槽202,固定桶3,内腔301,槽口302,通孔303,第一腔室304,第二腔室305,圆孔306,传动筒4,扭簧401,转筒402,平面齿轮403,卡槽404,插杆5,限位组件6,压块601,连接杆602,卡接杆603,弹簧604,固定杆7,齿轮8,转杆801。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本实用新型一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本实用新型及其应用或使用的任何限制。
28.为了保持本实用新型实施例的以下说明清楚且简明,本实用新型省略了已知功能和已知部件的详细说明。
29.请参阅图1-8所示,在本实施例中提供了一种无人驾驶汽车的雷达安装架,包括:雷达本体1、装设在雷达本体1下侧的底座2、与底座2相配合的固定桶3,固定桶3内部开设有内腔301,内腔301内部转动配合有传动筒4,传动筒4与内腔301之间装设有扭簧401;
30.底座2周侧开设有多个插槽201,固定桶3内壁下部开设有与内腔301相连通的多个槽口302,槽口302内滑动配合有与插槽201和传动筒4相配合的插杆5,固定桶3底部内壁弹性配合有与传动筒4相配合的限位组件6。
31.本实施例一个方面的应用为:需要安装雷达时,将雷达本体1装设在底座2上侧,将雷达本体1和底座2放入固定桶3内,并向下按压,使底座2挤压限位组件6,限位组件6缩入固定桶3内,并解除对传动筒4的限位,传动筒4通过扭簧401带动旋转,从而带动插杆5从槽口302内伸出并插入插槽201,即可完成安装雷达。需要注意的是,本技术中所涉及的所有用电设备可通过蓄电池供电或外接电源。
32.通过设置的底座2和固定桶3,能在用户安装雷达本体1时,通过限位组件6解除传
动筒4的限位,传动筒4通过扭簧401带动多个插杆5插入插槽201内,实现了对雷达本体1的快速安装。
33.如图4所示,本实施例的固定桶3内壁上部开设有与内腔301相连通的多个通孔303,通孔303内滑动配合有与传动筒4相配合的固定杆7。固定杆7能在传动筒4的带动下从通孔303内伸出,并对雷达进行夹持,减少安装完成的雷达晃动的情况。
34.如图4所示,本实施例的固定桶3底部开设有与内腔301相连通的第一腔室304,限位组件6弹性配合在第一腔室304内,限位组件6包括压块601、装设在压块601且伸入固定桶3内部周侧的连接杆602、装设在连接杆602上侧端部与传动筒4相配合的卡接杆603,压块601下侧装设有弹簧604。通过设置的限位组件6,能通过卡接杆603对转筒402进行限位,也能通过底座2对压块601的挤压,使压块601通过连接杆602带动卡接杆603移动,实现了对转筒602快速解除限位。
35.如图5所示,本实施例的传动筒4包括转筒402、分别装设在转筒402上部周侧和下部周侧的平面齿轮403,位于转筒402下部周侧的平面齿轮403下侧开设有与卡接杆603相卡接的卡槽404,位于转筒402下部的平面齿轮403上下面均设有齿牙,扭簧401的一端与转筒402内壁固定连连接,扭簧401的另一端与内腔301的内壁固定连接。
36.通过设置的转筒402,能使扭簧401通过转筒402带动两个平面齿轮403进行转动,从而使两个平面齿轮403通过齿牙分别带动插杆5和固定杆7移动,实现了对雷达本体1的快速安装。
37.如图4所示,本实施例的固定桶3的内部一侧开设有与内腔301相连通的第二腔室305,第二腔室305内转动配合有与传动筒4相啮合的齿轮8,固定桶3的外部周侧开设有与第二腔室305相连通的圆孔306,圆孔306内转动配合有与齿轮8固定连接的转杆801。
38.具体的,转杆801的端部为特定的形状,且通过设置的转杆801,能使用户通过特定的钥匙与转杆801的端部卡接转动,转杆801带动齿轮8转动,通过平面齿轮403带动转筒401转动,使两个平面齿轮403带动多个插杆5和多个固定杆7分别收缩进槽口302、通孔303内,并通过卡接杆603与卡槽404相卡接对传动筒4进行限位,实现了对雷达本体1的快速拆卸。
39.具体的,插杆5和固定杆7的一侧装设有推杆9,推杆9的一侧开设有与平面齿轮403的齿牙相啮合的齿槽。
40.具体的,压块601为矩形块,底座2下侧开设有与压块601相配合的定位槽202,定位槽202为矩形槽,且矩形槽深度小于矩形块高度.定位槽202,能在用户安装雷达时,通过定位槽202和压块601进行定位,使多个插槽201与多个插杆5分别一一对应。
41.具体的,当用户安装雷达本体1时,先将雷达本体1装设在底座2上侧,将雷达本体1和底座2插入固定桶3内并向下施加一定的力度进行按压,底座2通过定位槽202插接在压块601上侧并且通过压块601对底座2进行定位,底座2将压块601的一部分压入第一腔室304使,压块601通过连接杆602带动卡接杆603移动,卡接杆603脱离卡槽404解除对传动筒4的限位,扭簧401恢复形变带动传动筒4转动配合在内腔301内,转筒402转动带动两个平面齿轮403转动,两个平面齿轮403分别带动插杆5和固定杆7进行移动,插杆5从槽口302内伸出并插入插槽201内,完成对底座2的限位,固定杆7从通孔303内伸出并夹持在雷达本体1的周侧,完成对雷达本体1的固定;
42.需要解除限位时,用户使用特定的钥匙与转杆801端部进行卡接,转动钥匙,使钥
匙带动转杆801转动并通过齿轮8和平面齿轮403带动传动筒4转动,传动筒4通过两个平面齿轮403分别带动固定杆7和插杆5进行收缩,当固定杆7和插杆5分别完全缩至通孔303和槽口302内时,即可将雷达本体1和底座2从固定桶3内取出,取出底座2后,限位组件6通过弹簧604恢复形变带动卡接杆603插接进卡槽404内,即可完成解除限位。
43.上述实施例可以相互结合。
44.需要说明的是,本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术的实施方式能够以除了在这里图示或描述的那些以外的顺序实施。
45.在本实用新型的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本实用新型保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1