具有同步皮带联动万向脚轮机构的巡检机器人平台
1.本实用新型涉及一种具有同步皮带联动万向脚轮机构的巡检机器人平台。
背景技术:
2.随着我国规模养鸡产业不断发展,养鸡规模不断扩大,动辄几十万只规模。大量的笼养鸡,密集在鸡舍内,一旦发生传染病,损失极大。为此,现有养鸡场,都是采用人工在鸡舍内来回巡检,及时发现病鸡、死鸡,及时采取措施,如隔离、消毒和治疗。有经验的工人,悄悄从鸡笼走过,就能从鸡的叫声、精神状态判断出鸡是否健康,但是需要有丰富的经验和耐心,因为鸡是很敏感的生物,养殖人员动作大,声响大甚或没有穿常用工作服,都会引起鸡的骚动和应激反应,轻则影响巡检效果,不利于发现病鸡、死鸡,重则还会影响鸡的进食,甚至引发鸡出现踩踏现象。
3.同时由于大型鸡舍内养殖密度大,过道两侧密密麻麻排列多层鸡笼,每个鸡笼养殖3-5只鸡,养殖密度大,气味大、空气质量差,不利于巡检工人健康,也很少有人愿意从事这项工作,只有有耐心、有经验、责任心强,不怕苦,不怕累的人才能胜这项工作。
4.为了解决上述问题,人们不断尝试利用智能机器人完成上述工作,并提出了多项专利申请。授权公告号为cn109997730b的中国发明专利公开了一种巡检机器人。该巡检机器人包括箱体和立柱,箱体下方设有两个前轮和一个后轮,两个前轮为驱动轮,后轮为万向脚轮。这种三轮车结构转弯灵活,但是具有所有三轮车的通病,转弯时不如四轮车平稳,速度快了容易倾斜。
5.为此,发明人将后轮增加为两个万向脚轮,使三轮车变为四轮车。如此改变后,巡检机器人转弯时比原有三轮车平稳了。
6.但是两个万向脚轮相互独立,当遇到地面不平或有其他障碍时,容易出现两个万向脚轮方向不一致,甚至其轴线相互垂直的情况,此时会造成行驶不畅,阻力变大。
技术实现要素:
7.本实用新型要解决的技术问题是如何克服现有技术的上述缺陷,提供一种转向平稳、方便,且两个万向脚轮同步转向的具有同步皮带联动万向脚轮机构的巡检机器人平台。
8.为解决上述技术问题,本具有同步皮带联动万向脚轮机构的巡检机器人平台包括箱体和立柱,箱体下方设有车轮,立柱固定在箱体上,箱体内设有蓄电池、可编程序控制器和存贮器,所述存贮器与可编程序控制器电连接,并配有电源开关,所述车轮包括左前轮、右前轮和万向脚轮,左前轮、右前轮分别配有左轴、右轴、左驱动电机和右驱动电机,左轴和右轴分别通过轴承相对固定在箱体前部两侧壁上,左轴和右轴分别由左驱动电机和右驱动电机驱动,左轴轴心线与右轴轴心线重合,其特征在于:所述万向脚轮包括左后万向脚轮和右后万向脚轮,所述箱体尾部两侧底板上分别开有一个竖直通孔,左后万向脚轮和右后万向脚轮均包括滚轮、偏心架和竖轴,滚轮通过水平轴铰接在偏心架上,偏心架固定在竖轴下端,并通过竖轴铰接在所述箱体尾部两侧的竖直通孔内,所述左后万向脚轮和右后万向脚
轮的竖轴上分别固定有同步皮带轮,两个同步皮带轮上套有同步皮带。如此设计,同步皮带通过同步皮带轮带动竖轴同步转向,有效避免了两个万向脚轮各自为政,转向不同步的问题。
9.作为优化,所述同步皮带一侧还设有一张紧轮,该张紧轮通过轮轴可旋转地固定在滑块上,该滑块设置在滑轨上,所述滑轨固定在箱体上,所述箱体上还固定有基板,该基板上开有螺纹通孔,螺纹通孔内设有调节螺钉,所述调节螺钉前端抵在滑块,所述张紧轮压在所述同步皮带的外侧。如此设计,通过调节张紧轮,使同步皮带保持恰当的张紧度,既能保证两个万向轮同步,又不会因为过度张紧,导致转向阻力过大。
10.本具有同步皮带联动万向脚轮机构的巡检机器人平台转向结构简单,转向平稳,且万向脚轮同步性好,适合充当笼养鸡巡检机器人。
附图说明
11.下面结合附图对本具有同步皮带联动万向脚轮机构的巡检机器人平台作进一步说明:
12.图1是本具有同步皮带联动万向脚轮机构的巡检机器人平台的立体结构示意图;
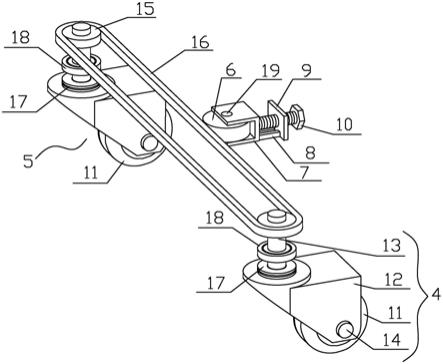
13.图2是本具有同步皮带联动万向脚轮机构的巡检机器人平台的两个万向脚轮之间的同步转向机构示意图。
14.图中:1为箱体、2为立柱、3为左前轮、4为左后万向脚轮、5为右后万向脚轮、6为张紧轮、7为滑块、8为滑轨、9为基板、10为调节螺钉、11为滚轮、12为偏心架、13为竖轴、14为水平轴、15为同步皮带轮、16为同步皮带、17为轴向受力轴承、18为径向受力轴承、19为轮轴。
具体实施方式
15.实施方式一:如图1-2所示,本具有同步皮带联动万向脚轮机构的巡检机器人平台包括箱体1和立柱2,箱体1下方设有车轮,立柱2固定在箱体1上,箱体1内设有蓄电池(图中未示出)、可编程序控制器(图中未示出)和存贮器(图中未示出),所述存贮器与可编程序控制器电连接,并配有电源开关(图中未示出),所述车轮包括左前轮3、右前轮和万向脚轮,左前轮、右前轮分别配有左轴、右轴、左驱动电机(图中未示出)和右驱动电机(图中未示出),左轴和右轴分别通过轴承相对固定在箱体前部两侧壁上,左轴和右轴分别由左驱动电机和右驱动电机驱动,左轴轴心线与右轴轴心线重合,其特征在于:所述万向脚轮包括左后万向脚轮4和右后万向脚轮5,所述箱体1尾部两侧底板(图中未示出)上分别开有一个竖直通孔(图中未示出),左后万向脚轮4和右后万向脚轮5均包括滚轮11、偏心架12和竖轴13,滚轮11通过水平轴14铰接在偏心架12上,偏心架12固定在竖轴13下端,并通过竖轴13铰接在所述箱体1尾部两侧的竖直通孔内,所述左后万向脚轮4和右后万向脚轮5的竖轴13上分别固定有同步皮带轮15,两个同步皮带轮15上套有同步皮带16。
16.所述同步皮带16一侧还设有一张紧轮6,该张紧轮6通过轮轴19固定在滑块7上,该滑块7设置在滑轨8上,所述滑轨8固定在箱体1上,所述箱体1上还固定有基板9,该基板9上开有螺纹通孔,螺纹通孔内设有调节螺钉10,所述调节螺钉10前端抵在滑块7,所述张紧轮6压在所述同步皮带15的外侧。所述滑轨8上开有燕尾槽,所述滑块7下方设有相应的凸出部,并通过上述凸出部嵌合在燕尾槽内,并可燕尾槽前后移动。
技术特征:
1.一种具有同步皮带联动万向脚轮机构的巡检机器人平台,包括箱体和立柱,箱体下方设有车轮,立柱固定在箱体上,箱体内设有蓄电池、可编程序控制器和存贮器,所述存贮器与可编程序控制器电连接,并配有电源开关,所述车轮包括左前轮、右前轮和万向脚轮,左前轮、右前轮分别配有左轴、右轴、左驱动电机和右驱动电机,左轴和右轴分别通过轴承相对固定在箱体前部两侧壁上,左轴和右轴分别由左驱动电机和右驱动电机驱动,左轴轴心线与右轴轴心线重合,其特征在于:所述万向脚轮包括左后万向脚轮和右后万向脚轮,所述箱体尾部两侧底板上分别开有一个竖直通孔,左后万向脚轮和右后万向脚轮均包括滚轮、偏心架和竖轴,滚轮通过水平轴铰接在偏心架上,偏心架固定在竖轴下端,并通过竖轴铰接在所述箱体尾部两侧的竖直通孔内,所述左后万向脚轮和右后万向脚轮的竖轴上分别固定有同步皮带轮,两个同步皮带轮上套有同步皮带。2.根据权利要求1所述的具有同步皮带联动万向脚轮机构的巡检机器人平台,其特征在于:所述同步皮带一侧还设有一张紧轮,该张紧轮通过轮轴固定在滑块上,该滑块设置在滑轨上,所述滑轨固定在箱体上,所述箱体上还固定有基板,该基板上开有螺纹通孔,螺纹通孔内设有调节螺钉,所述调节螺钉前端抵在滑块,所述张紧轮压在所述同步皮带的外侧。
技术总结
本实用新型涉及一种具有同步皮带联动万向脚轮机构的巡检机器人平台。为克服现有技术缺陷,本实用新型包括箱体和立柱,箱体下方设有车轮,车轮包括左前轮、右前轮和万向脚轮,万向脚轮包括左后万向脚轮和右后万向脚轮,箱体尾部两侧底板上分别开有一个竖直通孔,左后万向脚轮和右后万向脚轮均包括滚轮、偏心架和竖轴,滚轮通过水平轴铰接在偏心架上,偏心架固定在竖轴下端,并通过竖轴铰接在所述箱体尾部两侧的竖直通孔内,所述左后万向脚轮和右后万向脚轮的竖轴上分别固定有同步皮带轮,两个同步皮带轮上套有同步皮带。本具有同步皮带联动万向脚轮机构的巡检机器人平台转向结构简单,转向平稳,且万向脚轮同步性好,适合充当笼养鸡巡检机器人。鸡巡检机器人。鸡巡检机器人。
技术研发人员:连京华 李福伟 刘玮 李大鹏 李惠敏 韩海霞 雷秋霞 周艳 刘杰 王杰 曹顶国
受保护的技术使用者:山东省农业科学院家禽研究所(山东省无特定病原鸡研究中心)
技术研发日:2021.12.24
技术公布日:2022/5/4
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1