用于检查选高阀的方法与流程
1.本发明涉及一种用于检查气动的系统中的、优选能电子控制的气动的制动系统中的梭阀的方法,其中,梭阀具有第一梭阀接口、第二梭阀接口和第三梭阀接口,其中,总是将施加在第一梭阀接口和第二梭阀接口处的压力中的更高的压力调控给第三梭阀接口。本发明还涉及一种用于车辆的、优选商用车辆的气动的系统,该气动的系统具有这种梭阀,以及涉及一种车辆、优选商用车辆,该车辆具有前述类型的气动的系统。
背景技术:
2.将施加在第一和第二接口处的压力中的更高的压力转引给第三接口的梭阀,也被称为“选高阀”。在制动系统中多种多样地使用这种梭阀,例如以便耦接冗余的系统、转引冗余的压力或者承担起其他的控制任务。在冗余的系统的范畴内,梭阀尤其也能够在较高的自动化程度下、尤其是在sae 2~5级、尤其是3~5级下使用。在此重要的是,提供有措施和方法来检查这样的梭阀,这是因为在自动化程度较高的车辆中,人类驾驶员不再能不受限制地识别故障。
3.原则上有可能使用附加的、特别的传感器来检查这种梭阀,这些传感器检查梭阀的功能作用。但这是耗费的,提高了结构空间和成本,并且几乎无法经济地在广泛的领域中使用。这种情况尤其是发生在考虑到在制动系统中典型地使用多个这样的梭阀时。
技术实现要素:
4.因此,本发明的任务是,说明一种用于检查这种梭阀的方法,用该方法使得即使在车辆运行期间也能简单地、廉价地和安全地检查梭阀。
5.在第一个方面中,本发明用本文开头所述类型的方法解决任务,该方法具有以下步骤:a)给第一梭阀接口调控出第一压力;b)在第一梭阀接口处获知针对第一压力的指示值;和c)将针对第一压力的指示值与为此所设的预先确定的第一比较值相比较,并且在偏差大于第一公差时:获知和/或输出梭阀发生故障。
6.本发明基于的思路是,经由比较针对在充气和放气时施加在第一梭阀接口处的压力的指示值,确保了选高阀的无故障的运转。这就是说,在给第一梭阀接口调控出第一压力期间,获知针对该压力的指示值并且然后将该值与相应的比较值相比较,以便检查梭阀的功能作用。这能够既通过扩展的测试激活,例如在扩展的发车控制(abfahrkontrolle)的范畴内发生,也能够在持续运行中或在主动的压力调控时发生。
7.当在步骤a)中给第一梭阀接口调控出第一压力时,优选不给第二梭阀接口加载压力,而是优选进行放气。但也存在稍后还将说明的实施方式,在这些实施方式中进行并行的压力调控。当给第一梭阀接口调控出第一压力,而给第二梭阀接口施加周围环境压力时,梭阀应当做出这样反应,即,使得在第三梭阀接口处提供第一压力。典型地可能在梭阀中出现的故障,一方面是泄漏,泄漏例如在阀球卡住时发生,或者是阀元件的不正确的定位等。泄漏可能存在于第一和第三梭阀接口之间、第二和第三梭阀接口之间或者也存在于第一和第
二梭阀接口之间。所有这些故障应当通过所述方法识别到。
8.原则上可能的和优选的是,为了给第一和第二梭阀接口调控出第一、第二和另外的压力,这些梭阀接口从周围环境压力起被充气、从另一个压力起被充气,或者从更高压力起被放气,以便达到第一或第二或另外的压力。例如可能出现的是,在运行中先调控出最大压力,然后为了调控出相应的第一、第二或另外的压力而从最大压力放气到第一、第二或另外的压力。也能够以这种方式在第一或第二梭阀接口处提供相应的压力。
9.针对第一压力的指示值能够例如是比如以mpa为单位的、在特定的持续时间内测得的压力,或者是记录在特定的持续时间内、例如以mpa为单位的、关于时间的压力变化曲线。这种值的第一时间导数、即在特定的时间点上的压力梯度,特别优选是在特定的时间段内的压力梯度或在特定的持续时间内的压力梯度变化曲线。梯度值尤其是优选的,这是因为梯度值说明了第一压力的随时间变化的情况,由该随时间变化情况能够以优选的方式获知梭阀的切换和切换表征。
10.在现在于步骤a)至c)中测试第一梭阀接口之后,优选在另外的步骤d)至f)中测试第二梭阀接口。为此,优选在步骤d)中给第二梭阀接口调控出第二压力;在步骤e)中获知在第二梭阀接口处针对第二压力的指示值;并且在步骤f)中将针对第二压力的指示值与为此所设的预先确定的第二比较值相比较,并且在偏差大于第二公差时获知和/或输出故障。在这些步骤期间,第一梭阀接口优选被放气到周围环境压力。这就是说,在测试第一梭阀接口之后,在给第二梭阀加载第二压力之前,该第一梭阀接口优选被放气到周围环境压力。如上文那样参考第一梭阀接口所说明的同样的论述基本上适用于第二梭阀接口的检查,因而能够参考这些论述。
11.在一种优选的改进方案中,方法包括以下步骤:g)将由针对第一压力的指示值和针对第二压力的指示值的差与预先确定的第一阈值相比较;并且在低于第一阈值时:获知和/或输出梭阀故障。梭阀典型地应当对称地发挥作用,从而在优选一致的第一或第二压力是已知的情况下,相应的针对第一和第二压力的指示值的差也是已知的。若低于预先确定的第一阈值或者差量超过了所提出的第一阈值,那么优选又获知和/或输出故障。超出或低于第一阈值的原因可能在于梭阀的阀球在单侧被卡住并且因此出现了非常不同的针对第一和第二压力的指示值。
12.之前的论述优选涉及到第一和第二压力的所谓的“按顺序的”调控,此时前后相继地调控出第一和第二压力,第一和第二梭阀接口中的另一个梭阀接口则被放气。然而在一种优选的改进方案中则进行并行的调控。在此优选的是,在步骤d)中,如上文所说明的那样,在给第一梭阀接口已经调控出第一压力期间,给第二梭阀接口调控出第二压力。这就是说,在这种情况下,先给第一梭阀接口调控出第一压力并且维持住,然后在过去一段预先确定的时期后,给第二梭阀接口调控出第二压力。针对第一和第二压力具有相同的水平并且梭阀对称构造的情形,所获知的针对第一或第二压力的指示值不应改变。在调控第二压力时,即使当该第二压力具有相同的水平时,第一压力也一如既往地被控制通过并且梭阀没有换向。与该预期的针对第一或第二压力的指示值的偏差又能够表明梭阀有缺陷,从而获知和/或输出故障。
13.针对第一压力的指示值特别优选是压力梯度。预先确定的第一比较值在这种情况下是第一比较压力梯度。针对第二压力的指示值也优选是压力梯度,即第二压力梯度。预先
确定的第二比较值在这种情况下是第二比较压力梯度。优选也能够在特定的时间段内分别检测多个压力梯度并且因此获得了压力梯度变化曲线。因此在一种优选的实施方式中,针对第一压力的指示值是压力梯度变化曲线并且预先确定的第一比较值是第一额定变化曲线。针对第二压力的指示值也优选是压力梯度变化曲线并且预先确定的第二比较值是第二额定变化曲线。同样的论述也能够适用于第三、第四等压力和相应的针对这些压力的指示值。
14.额定变化曲线于是涉及到压力梯度的随时间的变化,优选从给第一梭阀接口调控出第一压力起。若在此偏差大于预先确定的第一公差,那么获知故障或者也输出故障。故障能够优选输出给驾驶员,或者也仅在内部在控制单元中输出故障,以便将车辆转移到安全的状态。
15.第一和第二压力或者其他压力原则上也能够具有不同的水平。就此而言优选的是,方法包括以下步骤:给第二梭阀接口调控出小于最大压力的第三压力;给第一梭阀接口调控出第四压力,其中,第四压力高于第三压力;在第一梭阀接口处获知关于时间的压力梯度变化曲线;并且获知所获知的压力梯度变化曲线与预先确定的额定变化曲线的偏差;并且在确认有偏差时:获知和/或输出梭阀的故障。当先调控出第三压力,而第一梭阀接口被放气并且然后调控出第四压力,而第三压力仍被调控出时,梭阀应当换向并且将第一梭阀接口与第三梭阀接口连接起来。这是因为第四压力高于第三压力。第四压力也能够基本上相应于第一压力。当第四压力超出第三压力时,梭阀的换向得出了具有表征性的特征线,其相应于额定变化曲线。当梭阀有故障时,实际上测得的特征线偏离该额定变化曲线,从而又能够获知和/或输出故障。
16.应理解,这个方面也能够独立于所说明的第一个方面进行论述。这就是说,并没有强制性必需地如上文所说明那样先执行步骤a)至f),更确切地说,优选直接先调控出第三压力,然后调控出第四压力并且因此获得了特征线,将该特征线与额定特征线相比较。
17.在另一种优选的实施方式中,方法包括以下步骤:给第一梭阀接口调控出第五压力;在调控出第五压力期间,给第二梭阀接口调控出第六压力,其中,第六压力是极小的压力;在一段时间内检测施加在第二梭阀接口处的压力;并且在施加在第二梭阀接口处的压力上升时:获知和/或输出梭阀的故障。也能够设置的是,先调控出第六压力,并且紧接着调控出第五压力,或者同时调控出两个压力。第六压力是极小的压力,优选是最小压力,优选是相应的系统能够在第二梭阀接口处所提供的尽可能最小的压力。压力的水平例如在0.01mpa至0.05mpa的范围内。在检测施加在第二梭阀接口处的压力的上升时,要么以mpa为单位测量的压力值的形式,要么以mpa/s为单位测量的梯度的形式,优选又使用考虑到了一定的公差范围的阈值。若在一段时间内在第二梭阀接口处的压力上升,那么这可能是空气从第一梭阀接口溢流到第二梭阀接口的标志。通常应当在梭阀中防止这一点并且在当前的实施方式中应当仅在第三梭阀接口处提供第一梭阀接口的压力,而没有压力从第二梭阀接口向第一或第三梭阀接口调控出。
18.不过因为原则上也能想到的是,给第二梭阀接口调控出的第六压力的模块具有泄漏,并且由于这种泄漏,使得在第二梭阀接口处的压力在一段时间内上升,所以所述方法优选包括以下步骤:将第一梭阀接口从第五压力放气到周围环境压力,并且给第二梭阀接口调控出第六压力;检测一段时间内施加在第二梭阀接口处的压力;并且当施加在第二梭阀
接口处的压力保持在预先确定的公差范围内时:获知和/或输出梭阀的故障。这些步骤紧接上文所说明的步骤地实施。当在调控出第五压力期间,第二梭阀接口处的压力上升,但当没有给第一梭阀接口调控出压力时则并不上升,这标志着,恰恰不是与第二梭阀接口联接的模块有泄漏,而是有空气从第一梭阀接口溢流到第二梭阀接口。恰恰在这种情况下,就应当确定或输出故障。压力又能够作为以例如mpa为单位测量的压力值或压力变化曲线获知,或作为该压力的时间导数,即作为例如以mpa/s为单位测量的压力梯度或压力梯度变化曲线获知。
19.在一种优选的改进方案中还设置的是,方法包括以下步骤:获知当前的贮存器压力;其中,在考虑到所获知的当前的贮存器压力的情况下至少实施上述步骤c)。视贮存器压力的水平而定,梯度或梯度变化曲线可能不同地呈现,从而优选考虑到了该贮存器压力。同样的说明也适用于上述步骤f)。更高的贮存器压力可能导致按比例更高的压力梯度,从而通过考虑到贮存器压力能够将所获知的压力梯度和压力梯度变化曲线标准化。
20.与针对第一压力的指示值相比较的预先确定的比较值优选是基于之前测得的值学习后的值。在车辆正常运行期间检测和储存针对第一压力的指示值和其余的值,如针对第二压力的指示值。这些值被称为学习后的值。若确认偏离了这些值,那么这标志着梭阀有缺陷。这能够适用于所有针对压力的指示值,如尤其是各个压力值、压力变化曲线、梯度和梯度变化曲线。
21.也优选的是,将在第一和第二梭阀接口处的第一和第二梯度以及第一和第二梯度变化曲线相互比较,以便以这种方式识别故障。在另一种优选的实施方式中设置的是,至少从内部的存储介质和/或无线地从云服务接收预先确定的第一比较值。同样的说明优选也适用于另外的值,如预先确定的第二比较值、预先确定的第一阈值和预先确定的额定变化曲线以及针对第一和第二梯度变化曲线的其他的比较值和另外的在其中所使用的值。一方面能想到的是,在制造商方面将这些值预先储存在内部的存储器中,并且必要时在服务时进行更新。另一方面也能想到的并且优选的是,经由云服务来提供这些值。这使得能在服务器上更新并且能相应地经由云服务提供这些值。在此,也能够一同考虑到另外的特性,如使用寿命、运行时间等。
22.为了与云服务连接,优选设有相应的接口,该相应的接口能够无线地接收所述一个或多个相应的值。为此,其上实施前述方法的车辆能够包括无线电模块,如lte模块等。
23.在另一种优选的实施方式中设置的是,第一阀模块、优选第一车桥调制器与第一梭阀接口联接,并且第二阀模块、优选第二车桥调制器与第二梭阀接口联接,其中,第一和第二阀模块间接地或直接地彼此电子地通信,并且其中,第三梭阀接口与消耗器、优选是制动促动器连接。第一车桥调制器优选被设置成用于车辆的正常运行并且第二车桥调制器被设置成用于车辆的冗余运行。在第一和第二车桥调制器之间的间接的或直接的通信然后被用于既传输运行信号也传输停运信号、故障信号等。间接的通信能够例如通过中间连接的另外的模块、车辆总线等完成。正是在这些情况中,倘若在冗余情况下第二车桥调制器必须接管安全制动车辆的任务的话,梭阀的工作能力就十分重要。
24.优选地,在制动车辆期间实施所述方法的步骤,其中,第一压力是用于制动车辆的第一制动压力。当提供用于制动车辆的第一制动压力时,总是优选的是,在之前的步骤之后测试梭阀的工作能力。在这种情况下,不需要实施或执行针对车辆的单独的测试例行程序,
从而总体上能够执行有效的测试过程。
25.还优选的是,在车辆停运时实施所述方法的步骤,其中,方法还包括以下步骤:接收发车控制信号以实施发车控制;并且作为对接收发车控制信号的回应:至少实施步骤a)至c)。根据这种实施方式,在针对车辆的扩展的发车控制的范畴内执行方法、至少是步骤a)至c)、优选另外的步骤。由此能够总体上提高车辆的安全性。
26.在第二个方面中,本发明用一种本文开头所述类型的气动的系统解决本文开头所述的任务,其中,除了本文开头所述的梭阀外,还包括第一阀模块,该第一阀模块与第一梭阀接口连接,以便给该第一梭阀接口调控出第一压力,并且包括第一压力传感器,以用于检测针对第一压力的指示值;并且还设有第二阀模块,该第二阀模块与第二梭阀接口连接,以便给该第二梭阀接口调控出第二压力,并且具有第二压力传感器,以用于检测针对第二压力的指示值;以及还包括电子控制单元,该电子控制单元与第一和第二阀单元连接,以用于接收第一和第二压力传感器的第一和第二压力信号,第一和第二压力信号代表了第一和第二指示值,其中,电子控制单元还具有适用于实施根据本发明的第一个方面的方法的步骤的器件。
27.应理解,根据本发明的第一个方面的方法以及根据本发明的第二个方面的气动的系统具有相同的和相似的子方面,如尤其是在从属权利要求中写下的那样。就此而言,针对特别的实施方式和它们的优点以及特征组合能够全面地参考上述的针对本发明的第一个方面的说明。
28.气动的系统优选是用于商用车辆的、尤其是较高自动化等级的、尤其是按sae 3、4或5级的商用车辆的能电子控制的制动系统的一部分。适用于实施根据本发明的第一个方面的方法的步骤的器件优选包括处理器以及存储器,存储器上储存有软件代码。
29.在气动的系统的第一优选的实施方式中,第一阀单元被构造成第一车桥调制器,并且第二阀单元被构造成第二车桥调制器,其中,第三梭阀接口与制动促动器以导引流体的方式连接。
30.此外还优选的是,第一车桥调制器被构造且设置成用于车辆的正常运行,并且第二车桥调制器被构造且设置成用于冗余情况,在冗余情况中,第一车桥调制器无法工作或无法正确地工作。针对第一车桥调制器停运的原因可能是,上级的系统停运,或者也可能是在第一车桥调制器内出现了直接的故障。
31.还优选的是,在第三梭阀接口的下游的路径不具有另外的压力传感器。第三梭阀接口优选直接或经由布设短的软管或管件与制动促动器连接。优选仅用在第一和第二阀单元中的传感器来实施根据本发明的第一个方面的方法的检查。尤其用第一压力传感器检测施加在第一梭阀接口处的压力并且用第二压力传感器检测施加在第二梭阀接口处的压力。由此能够确定相应的针对第一或第二压力的指示值,如压力梯度或压力梯度变化曲线。另外的传感器并不是必需的并且在本发明的范畴内也能够不设置。
32.第三个方面中,通过一种车辆、优选商用车辆解决本文开头提到的任务,车辆具有根据本发明的第二个方面的气动的系统的之前所说明的优选的实施方式中的其中一种实施方式所述的气动的系统。
33.在第四个方面中,通过一种计算机程序解决本文开头提到的任务,该计算机程序包括指令,指令促使根据本发明的第二个方面的气动的系统的前述优选的实施方式中的其
中一个实施方式所述的气动的系统实施根据本发明的第一个方面的方法的前述优选的实施方式中的其中一个实施方式所述的方法步骤。
34.现在,下文借助附图说明本发明的实施方式。这些附图不必按比例示出实施方式,更确切地说,用于阐释的附图以示意性的和/或略微失真的形式实施。关于由附图可直接得知的教导的补充内容,参考相关的现有技术。在此要考虑的是,在不偏离本发明的总体思路的前提下,能够对涉及到实施方式的形式和细节进行多种多样的修正和改变。在说明书、附图以及权利要求中公开的本发明的特征,无论是单独地还是以任意组合地,均对本发明的改进方案具有重要意义。此外,在说明书、附图和/或权利要求中公开的至少两个特征的所有组合均落入本发明的范畴内。本发明的总体思路并不局限于下文中示出和说明的优选的实施方式的确切的形式或细节,或者也局限于相比于权利要求中要求保护的主题受到限制的主题。就设定的测量范围肉眼,处在所述极限内的值也应当作为极限值公开,并且能任意使用并受到权利保护。为简单起见,下文针对一致的或相似的部分或具有一致的或相似的功能的部分使用相同的附图标记。
附图说明
35.本发明的另外的优点、特征和细节由接下来对优选的实施方式的说明以及借助附图得出;其中:
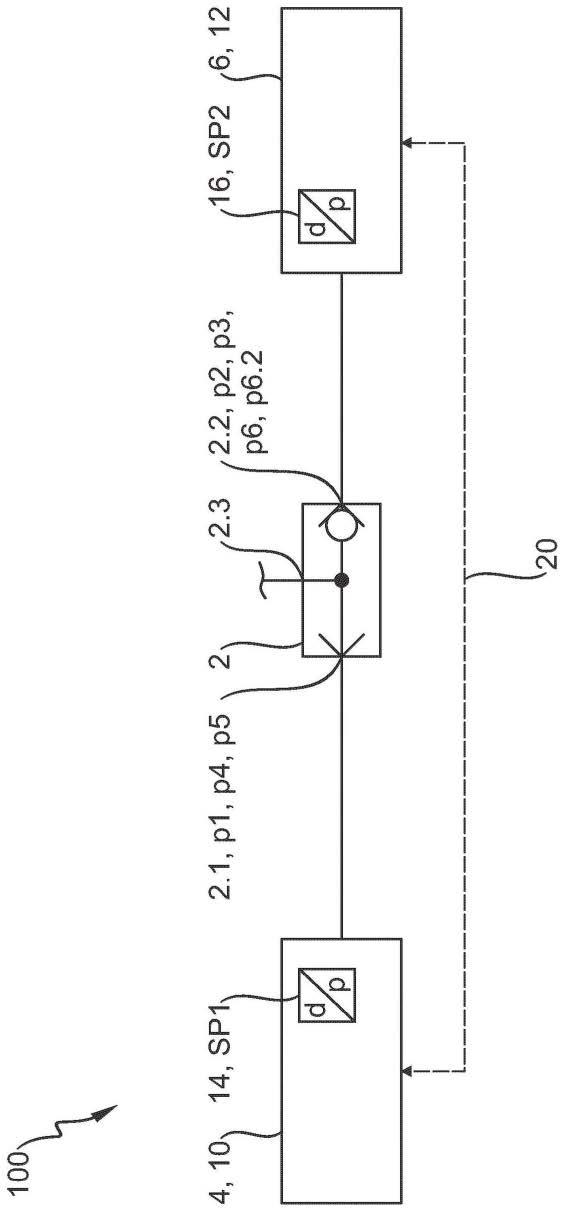
36.图1示出根据第一实施方式的气动的系统;
37.图2示出根据第二实施例的气动的系统;
38.图3示出具有制动系统的车辆;
39.图4示出具有压力梯度的图表;
40.图5示出具有压力梯度的第二图表;并且
41.图6中示出方法的示意性的流程。
具体实施方式
42.根据第一实施例的气动的系统100(图1)具有梭阀2,该梭阀根据传统的方式和方法构造。梭阀2具有第一梭阀接口2.1、第二梭阀接口2.2和第三梭阀接口2.3。这样来构造梭阀2,即,使得总是将施加在第一和第二梭阀接口2.1、2.2处的压力中的更高的压力调控给第三梭阀接口2.3。梭阀2因此也被称为“选高阀”。这种选高阀被多种多样地使用在电气动的制动系统中并且形成了标准构件。
43.根据图1所示的实施方式,第一梭阀接口2.1与第一阀模块4连接并且第二梭阀接口2.2与第二阀模块6连接。第三梭阀接口2.3能够与消耗器连接,如尤其是制动促动器8(参见图3)。但其他的消耗器也能够联接到第三梭阀接口2.3上,如(未示出的)调制器、弹簧蓄能器、制动缸、挂车控制阀和类似消耗器。
44.第一和第二阀模块4、6能够优选如在根据图2的第二实施例中所示那样构造成第一和第二车桥调制器10、12。这还将进一步更为准确地说明。
45.第一阀模块4用于给第一梭阀接口2.1至少调控出第一压力p1。此外,第一阀模块4还能够给第一梭阀接口2.1调控出接下来还要更为准确地说明的另外的压力。为了检测调控给第一梭阀接口2.1的压力,第一阀模块4包括第一压力传感器14,第一压力传感器提供
第一压力信号sp1。第二阀模块6以一致的方式被构造成用于给第二梭阀接口2.2至少调控出第二压力p2。此外,第二阀模块6能够给第二梭阀接口2.2调控出另外的压力,如下文中还将准确地说明的那样。第二阀模块6包括第二压力传感器16,该第二压力传感器被设置成用于检测调控给第二梭阀接口2.2的压力并且提供相应的第二压力信号sp2。
46.此外,由图1可知,第一和第二阀模块4相互通信。为此,在这些阀模块之间绘出了信号线路20。信号线路20在此仅是解释性的并且应当阐明第一和第二阀模块4、6能够间接或直接地相互通信。信号线路20能够例如由在第一和第二阀模块4、6之间的直接的布线构造而成,即构造为车辆总线,车辆总线还将在此没有示出的另外的模块相互连接起来,或者也构造为经由另外的模块的间接的连接部(同样未示出)。但是,信号线路20也能够由多个信号线路形成。第一和第二压力信号sp1、sp2也优选经由信号线路20提供。
47.在如图2所示的第一实际的设计方案中,第一阀模块4由第一车桥调制器10形成并且第二阀模块6由第二车桥调制器12形成。第一车桥调制器10在该实施例中(图2)具有形式为第一电子控制单元ecu1的自己的智能。在此构造为第二车桥调制器12的第二阀模块6同样具有在此形式为第二电子控制单元ecu2的自己的智能。
48.除了第一电子控制单元ecu1和第一压力传感器14外,第一阀模块4还具有第一阀装置22,该第一阀装置在此并没有详细说明,但其被用于从第一阀模块4的贮存器接口24接收贮存器压力pv,并且将该贮存器压力作为例如第一压力p1提供给第一梭阀接口2.1。这取决于对第一阀装置22内的一个或多个切换阀的切换情况来发生。车桥调制器的结构原则上是已知的,从而在此不必进一步探讨确切的结构。在此被构造为第二车桥调制器12的第二阀模块6被相应地构建并且具有第二阀装置26,第二阀装置经由第二贮存器接口28接收贮存器压力pv。取决于第二阀装置26的一个或多个切换阀的位置地,给第二梭阀接口2.2至少调控出第二压力p2。贮存器压力pv能够由一个或者也由两个不同的压缩空气贮存器提供,如参考图3更为详细阐释。在图2中所示的实施例中,第一压力传感器14与第一电子控制单元ecu1连接并且给第一电子控制单元提供第一压力信号sp1。第一电子控制单元ecu1然后与信号线路20连接,并且能够经由该信号线路将第一压力信号sp1提供给另外的单元、例如尤其是第二阀模块6。但也能够设置的是,第一电子控制单元ecu1经由信号线路20提供从第一压力信号sp1推导出的信号。第二阀模块6的第二压力传感器16也以一致的方式与第二电子控制单元ecu2连接并且给该第二电子控制单元提供第二压力信号sp2。第二电子控制单元ecu2然后本身与信号线路20连接,并且能够将第二压力信号sp2提供给该信号线路。同样能够设置的是,第二电子控制单元ecu2经由信号线路20提供从第二压力信号sp2推导出的信号。
49.在图3中示出了在制动系统102中在安装状况下的气动的系统100。图3更为准确而言解释了车辆200,即商用车辆202,其包括具有前述气动的系统100的这种能电子控制的气动的制动系统102。车辆200具有前桥va和后桥ha,但此外还能够包括另外的后桥。制动系统102具有后桥制动回路204、前桥制动回路206和驻车制动回路208。后桥制动回路204由第一压缩空气贮存器210供应、前桥制动回路206由第二压缩空气贮存器212供应并且驻车制动回路208由第三压缩空气贮存器214供应。全部三个压缩空气贮存器210、212、214都提供贮存器压力pv。
50.为了控制制动系统102,设有中央单元220,该中央单元具有中央的电子控制单元
ecuz。中央单元220经由车辆总线222与用于自动驾驶的单元224连接,以便从该用于自动驾驶的单元获得控制信号、制动请求信号或类似信号。车辆总线222也形成了信号线路20的一部分。
51.制动系统102在前桥va处包括制动促动器8,该制动促动器在此设置在前桥va的右前轮处。制动系统102在前桥va的左前轮处包括另外的制动促动器226以及在后桥ha处包括后桥制动促动器228a、228b。制动系统102在前桥va处还包括前桥调制器230,该前桥调制器在此设置成第一车桥调制器10的形式或第一阀模块4的形式。前桥调制器230经由前桥制动信号线路232与中央单元220连接并且从该中央单元接收切换信号。此外,前桥调制器230与第二压缩空气贮存器212连接并且从该压缩空气贮存器接收贮存器压力pv。前桥调制器230被设计成用于取决于经由又形成了信号线路20的一部分的前桥制动信号线路232所接收的信号来调控出前桥制动压力pbva。这以原则上已知的方式进行。前桥制动压力pbva然后在此经由第一和第二abs阀234a、234b提供给制动促动器8和另外的制动促动器226,以便实现与车轮相适应的制动。
52.在后桥ha处以类似的方式设有后桥调制器236,该后桥调制器与第一压缩空气贮存器210连接并且经由后桥制动信号线路238与中央单元220连接。后桥调制器236将后桥制动压力pbha调控给后桥制动促动器228a、228b。
53.针对在制动系统202中、例如在用于自动驾驶的单元224、中央单元20中或前桥调制器230和后桥调制器236中出现故障的情况,制动系统202包括冗余的控制单元240,该冗余的控制单元同样经由车辆总线222与用于自动驾驶的单元224连接以及经由内部的信号线路242与中央单元220连接。冗余的中央单元240被设置成用于在故障情况下接管对制动系统202的控制。
54.除了冗余的中央单元240外,制动系统202还包括在此形式为第二车桥调制器12或第二阀模块6的冗余的前桥调制器244。冗余的前桥调制器244经由冗余的前桥abs阀246a、246b同样与制动促动器8或另外的制动促动器226连接。在故障情况下,冗余的中央单元240控制冗余的前桥调制器244,以便因此调控出前桥制动压力pbva。为此,冗余的前桥调制器244也与第二压缩空气贮存器2连接,以及经由冗余的前桥制动信号线路248与冗余的中央单元240连接。冗余的前桥制动信号线路248也形成了信号线路20的一部分。冗余的前桥调制器244以这种方式经由冗余的前桥制动信号线路248、冗余的中央单元40、中央单元240和前桥制动信号线路232与前桥调制器230连接,以便因此能够交换信号并且能够与该前桥调制器通信。
55.在abs阀234a、234b或冗余的前桥abs阀246a、246b与制动促动器8或另外的制动促动器226之间接有梭阀2或另外的梭阀250。下文中主要说明梭阀2,其中,应理解,梭阀250被相同地构建并且工作方式相同。更准确地说,右边的abs阀234a与第一梭阀接口2.1连接并且右边的冗余的前桥abs阀246a与第二梭阀接口2.2连接。第三梭阀接口2.3在此直接与制动促动器8的制动室连接。
56.也为另外的制动促动器226设置类似的接法。为后桥制动回路204设置冗余的后桥调制器252,该冗余的后桥调制器在故障情况下能够取代后桥调制器236。该冗余的后桥调制器也经由第一和第二后桥梭阀254a、254b与后桥制动促动器228a、228b连接,如基本上已经参考前桥va所说明这一点。因此在此不再详细探讨这种连接。
57.因此,制动系统102总共具有四个梭阀,即梭阀2、另外的梭阀250以及第一和第二后桥梭阀254a、254b。原则上,这些梭阀被用于在正常运行时将前桥制动压力pbva或后桥制动压力pbha转引给相应的制动促动器。若在故障情况下冗余的中央单元240必须接管,那么前桥制动压力pbva或后桥制动压力pbha就经由冗余的前桥调制器244或冗余的后桥调制器252来调控出,并且因此经由相应的梭阀提供给相应的制动促动器。因此梭阀全部正确地运转是至关重要的。
58.为了检查梭阀2、250、254a、254b,优选在车辆200静止不动时或运行期间实施根据本发明的用于检查梭阀的方法。检查梭阀2能够既在扩展的发车控制的范畴内、在用车辆200开始行驶之前或者也在车辆200运行期间,例如在调控出前桥制动压力pbva和/或后桥制动压力pbha时执行。在方法的范畴内,优选先实施以下步骤:给第一梭阀接口2.1调控出第一压力p1;在第一梭阀接口2.1处获知针对第一压力p1的指示值;并且将针对第一压力的指示值与为此所设的预先确定的第一比较值相比较。在一个实施例中,针对第一压力的指示值一方面表示成在第一梭阀接口2.1处的第一压力梯度g1,但另一方面也表示成在此处的压力梯度变化曲线g1t。在将第一压力梯度g1与预先确定的第一比较值gv1相比较或者在压力梯度变化曲线g1t的情况下将压力梯度变化曲线g1t与第一额定变化曲线gs1相比较之后,在偏差大于第一公差t1时,获知和/或输出梭阀2的故障e。
59.图6中示出了这种方法流程,而图4和图5则以压力梯度和压力梯度变化曲线的形式示出了不同的针对第一或第二压力的指示值,并且在下文中加以确切说明。应理解,其他的值,如尤其是绝对的压力值,或在特定的时间间隔内的压力梯度,也能够用作针对压力的指示值。
60.根据图6,例如先在步骤st1中初始化检查方法。然后在步骤st2中能够例如向在中央的控制单元220中或第一或第二电子控制单元ecu1、ecu2中的内部的存储器m调用公差、额定变化曲线或其他的比较值。替选地也可能的是,经由云服务c获取这些值。然后在步骤st3中由第一阀模块4给第一梭阀接口2.1调控出第一压力p1(参见图1~3)。当在该步骤中没有压力被调控给第二梭阀接口2.2,而是施加周围环境压力p0时,通过梭阀2将给第一梭阀接口2.1调控出的第一压力p1提供给第三梭阀接口2.3。在此获得了具有表征性的第一压力梯度g1以及第一压力梯度变化曲线g1t。这在图4中示出。
61.图4(既针对第一压力p1也针对第二压力p2)解释了梭阀2的反应。若给第一梭阀接口2.1调控出在此作为跃变函数示出的第一压力p1,那么梭阀2发挥作用并且将该压力调控给第三梭阀接口2.3。在图4中也绘出了针对第一压力梯度比变化曲线g1t的第一额定变化曲线gs1以及第一比较值gv1。由图4可知,无论是第一压力梯度变化曲线gs1还是第一压力梯度g1,均处在第一额定变化曲线gs1以及第一比较值gv1下方。不过两者尚处在示例性地仅在图形的一个部位处绘出的第一公差t1之内。只要第一压力梯度变化曲线g1t和/或第一压力梯度g1处在第一公差t1之内,就不输出故障e。这就是说,在步骤st4中,先获知第一梭阀接口2.1处的第一压力梯度g1或第一压力梯度变化曲线g1t并且然后在步骤st5中执行比较,并且获知所获知的值是否处在公差t1之内。若所获知的值处在公差t1之内,那么在步骤st6中终止所述方法。然后能够在步骤st1中例如在预定的时间之后、在车辆200重新启动或类似时间后重新开始。不过若获知值处在第一公差t1之外,那么输出故障e。能够将故障e要么输出给上级的单元,如用于自动驾驶的单元224,要么经由屏幕显示器也输出给车辆200
的驾驶员。
62.但也可能的是,在步骤st6之后,进一步检查梭阀2,更确切地说尤其是检查第二梭阀接口2.2。当要进行这一点时,在步骤st7中给第二梭阀接口2.2调控出第二压力p2,而第一梭阀接口2.1优选被放气,这就是说,给该第一梭阀接口2.1施加周围环境压力p0。然后,在步骤st8中获知在第二梭阀接口2.2处的第二压力梯度g2或第二压力梯度变化曲线g2t。然后,在步骤st9中将该所获知的第二压力梯度g2或第二压力梯度变化曲线g2t与预先确定的第二比较值gv2和/或第二额定变化曲线gs2相比较。预先确定的第二比较值gv2和第二额定变化曲线gs2优选已经在步骤st2中从存储器m或云c调用。然后,在步骤st9中又执行比较,并且倘若第二压力梯度g2或第二压力梯度变化曲线g2t的值处在第二公差t2之内,就要么返回步骤st6并且终止所述方法,要么返回步骤st1,以便重新直接开始方法或者在稍后的时间点开始。不过若在步骤st9中确认测得的值处在第二公差t2之外,那么就输出故障e。第二压力梯度变化曲线g2t以及第二压力梯度g2在图4中绘出。
63.但也可能的是,并不严格前后相继地、这就是说按顺序地给第一和第二梭阀接口2.1、2.2调控出第一压力p1和第二压力p2,而是部分或完全并行地调控出压力。图5中示出了这种图示。根据图5,在用于检查梭阀2的方法中,先给第二梭阀接口2.2调控出第三压力p3,其中,第三压力p3小于第二阀模块6所能够调控出的最大压力pmax。在这个时间点上,还是先对第一梭阀接口2.1放气并且施加周围环境压力p0。在第二梭阀接口2.2用第三压力p3充气之后,现在通过第一阀模块4用第四压力p4对第一梭阀接口2.1充气,在图5所示的实施例中则用最大压力pmax充气。在梭阀2正确地运转时,梭阀现在必须转向并且不再将第三压力p3从第二梭阀接口2.2控制通过到第三梭阀接口2.3,而是将第四压力p4从第一梭阀接口2.1控制通过到第三梭阀接口2.3。在此又获得了第四压力梯度g4以及第四压力梯度变化曲线g4t。在图5中也绘出了第四额定变化曲线gs4以及第四比较值gv4。在此也能够再次检查,第四压力梯度变化曲线g4t是否充分相应于第四额定变化曲线gs4,并且第四压力梯度g4是否处在针对第四比较值gv4的公差范围(未示出)之内。
64.能够用于检查梭阀2的另一种方法如下实现:先给第一梭阀接口2.1调控出第五压力p5(参见图1)。第五压力p5又能够相应于最大压力pmax,或者是稍微降级的压力。紧接着、同时或者已经事先给第二梭阀接口2.2调控出第六压力p6,该第六压力优选是极小的压力,尤其是能借助第二阀模块6实现的最小压力或尽可能最小的压力。第六压力p6例如处在0.01至0.05mpa的范围内。紧接着又检测一段时间内施加在第二梭阀接口2.2处的压力。这用第二压力传感器16实现。观察所检测到的压力p6.2。若所观察的这个检测到的压力p6.2在一段时间内上升,那么这标志着梭阀2有缺陷并且第五压力p5溢流到第二梭阀接口2.2。这就是说,若以这样的方式获知的梯度超过了与该梯度相配属的阈值,那么就获知和/或输出故障。为了验证这一点,然后能够在另外的步骤中将第一梭阀接口2.1放气到周围环境压力p0并且又给第二梭阀接口2.2调控出第六压力p6。若又观察所施加的压力p6.2并且当该压力不上升时,即相应的梯度约为0时,则大多表明梭阀2有缺陷。在这种情况下于是获知和/或输出故障e。
65.附图标记列表
66.2梭阀
67.2.1第一梭阀接口
68.2.2第二梭阀接口
69.2.3第三梭阀接口
70.4第一阀模块
71.6第二阀模块
72.8制动促动器
73.10第一车桥调制器
74.12第二车桥调制器
75.14第一压力传感器
76.16第二压力传感器
77.20信号线路
78.22第一阀装置
79.24第一贮存器接口
80.26第二阀装置
81.28第二贮存器接口
82.100气动的系统
83.102能电子控制的气动的制动系统
84.200车辆
85.202商用车辆
86.204后桥制动回路
87.206前桥制动回路
88.208驻车制动回路
89.210第一压缩空气贮存器
90.212第二压缩空气贮存器
91.214第三压缩空气贮存器
92.220中央单元
93.222车辆总线
94.224用于自动驾驶的单元
95.226另外的制动促动器(va)
96.228a、228b后桥制动促动器
97.230前桥调制器
98.232前桥制动信号线路
99.234a、234babs阀
100.236后桥调制器
101.238后桥制动信号线路
102.240冗余的中央单元
103.242内部的信号线路
104.244冗余的前桥调制器
105.246a、246b冗余的前桥abs阀
106.248冗余的前桥制动信号线路
107.250另外的梭阀
108.252冗余的后桥调制器
109.254a、254b后桥梭阀
110.c云服务
111.e故障
112.ecu1第一电子控制单元
113.ecu2第二电子控制单元
114.ecuz中央单元的电子控制单元
115.g1第一压力梯度
116.g2第二压力梯度
117.g4第四压力梯度
118.g1t第一压力梯度变化曲线
119.g2t第二压力梯度变化曲线
120.g4t第四压力土地变化曲线
121.gs1第一额定变化曲线
122.gs2第二额定变化曲线
123.gs4第三额定变化曲线
124.gv1第一比较值
125.gv2第二比较值
126.gv4第四比较值
127.m存储器
128.t1第一公差
129.t2第二公差
130.p1第一压力
131.p2第二压力
132.p3第三压力
133.p4第四压力
134.p5第五压力
135.p6第六压力
136.p6.2观察到的第六压力
137.pbha后桥制动压力
138.pbva前桥制动压力
139.pmax最大压力
140.pv贮存器压力
141.sp1第一压力信号
142.sp2第二压力信号
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1