一种双电机耦合驱动履带车辆电气负载特性分析方法与流程
1.本发明属于电驱动车辆功率控制技术领域,尤其涉及一种双电机耦合驱动履带车辆电气负载特性分析方法。
背景技术:
2.在新的军事科技发展趋势和新的军事作战形势下,为开拓出全新的战术、战役和战略能力,适应技术的快速发展,进一步提升战场机动的快速性、灵敏性和持续性,发达国家纷纷开展坦克新型传动技术的研究。坦克装甲车辆的电子战应对、生存能力升级、机动性提高、战地服务能力增强等新需求也愈加明显,都要求传动装备具备远程快速机动能力、较低的战场保障需求、高效高功率密度的一体化总体设计和大功率供电能力。以行星传动技术、电力电子与电气传动技术等综合机、电多学科领域优势构成的电驱动技术能大幅提升车辆机动性能,具备远程快速机动能力;能改善车辆燃油经济性,降低战场保障需求;具有大功率电能供给能力,满足武器、防护等大功率用电的需求。因此,由于能很好的适应新军事发展需求,电驱动技术已成为未来传动技术发展的趋势。
3.在双电机耦合驱动重型履带车辆中,可将动力传动系统划分为由发动机-发电机组组成的前功率链和由电机控制器-电动机组成的后功率链。前功率链的动力源发动机发出的机械能先通过发电机转换成电能,而后再通过后功率链电机控制器和电动机将电能转换成机械能传递至驱动轮,能量的传递过程是一个机械能-电能-机械能的转换过程。前功率链与后功率链之间只通过电能传递能量,两者之间没有机械上的约束条件,因此相对于机械传动系统而言,能量耦合方面相对较弱,两者在控制上具有相对独立性。双电机耦合驱动系统中,驾驶员通过加速踏板向后功率链发出功率指令,前功率链需要根据后功率链的功率需求输出相应的功率,因此,车辆的加速性能取决于两个方面:一方面是后功率链特性;另一方面是前功率链的功率跟随特性。在双电机耦合驱动系统中,前功率链动力源所受的负载不是直接的路面负载,而是后功率链对其施加的电功率负载。相对于路面负载,后功率链所能施加的电功率负载在短时间内就有大范围的变化,因此如果后功率链短时间内要求输出大功率,特别是急加速和高速转向等极限工况,而前功率链不能够及时提供相应功率,就会造成直流母线电压降低,甚至发动机及熄火等不正常工况的出现。因此在双电机耦合驱动系统中,功率源的控制要基于后功率链的电气负载需求特性开展,前功率链的功率输出与后功率链的加载必须在控制上配合协调才能具有比普通机械传动系统更好的动力性能。
4.机电复合传动履带车辆的行驶工况复杂多变,不同的车速和转向半径下,主动轮所需的驱动电机功率有着很大差别,且变动剧烈。车载电网的后功率链用电负载也因之发生着较高频率较高幅值且规律性不明显的变动。如果车载电网供电能力无法跟随用电负载,则供电稳定性将遭到破坏。若供电侧电能远大于用电负载,则高压电池将过度充电,电网也易过压失稳;若供电侧电能远小于用电负载,则高压电池将过度放电,电网也易欠压失稳。
技术实现要素:
5.为解决上述问题,本发明提供一种双电机耦合驱动履带车辆电气负载特性分析方法,搭建出双电机耦合驱动重型履带车辆电气负载特性预估模型,能够实现供电稳定性控制。
6.一种双电机耦合驱动履带车辆电气负载特性分析方法,直驶工况下的履带车辆电气负载特性如下:
[0007][0008]
其中,为初始时刻的负载功率估计值,f为设定的车辆路面滚动阻力系数,g为整车质量,η为履带至电机传动效率,rz为车辆的主动轮半径,sa0为加速踏板初始值,n
max
为电机最高转速,ic为侧传动比,ib为emt变速机构传动比,ij为电机减速传动比,p
gmax
为发电机最大输出功率,为k时刻的负载功率估计值,p
lk
为k时刻的实际负载功率,δsa为油门踏板开度增量,t
max
为单侧电机最大输出扭矩,vk为k时刻的车速;
[0009]
转向工况下的履带车辆电气负载特性如下:
[0010][0011][0012][0013]
其中,为k时刻履带车辆平移运动消耗功率的估计值,p
pyk
为k时刻履带车辆平移运动消耗功率的实际值,δvk为k时刻的车速增量,为k时刻履带车辆旋转运动消耗功率的估计值,p
xzk
为k时刻履带车辆旋转运动消耗功率的实际值,μk为k时刻的转向阻力系数,ρk为k时刻的相对转向半径,l为履带接地长,b为履带中心距,δρ为相对转向半径增量,p
py
为履带车辆平移运动消耗功率,p
xz
为履带车辆旋转运动消耗功率;
[0014]
制动工况下的履带车辆电气负载特性如下:
[0015]
当履带车辆为滑行制动时:
[0016][0017]
其中,nk为电机k时刻的转速,t
max
(nk)为转速nk下电机可输出的最大制动扭矩,p
mmax
为单侧电机最大功率;
[0018]
当履带车辆为电制动时:
[0019][0020]
其中,s
bk
为k时刻的制动踏板信号归一化后的值。
[0021]
进一步地,k时刻的车速增量δvk的计算方法为:
[0022][0023]
进一步地,所述相对转向半径增量δρ的计算方法为:
[0024][0025]
其中,k
ib
为与挡位有关的转向半径调整系数,ss为方向盘转角信号归一化后的值,δss为方向盘转角变化值。
[0026]
进一步地,所述k时刻的相对转向半径ρk的计算方法为:
[0027][0028]
其中,ko为功率耦合机构行星排参数,n
2k
为高速侧电机转速,n
1k
为低速侧电机转速。
[0029]
进一步地,k时刻的转向阻力系数μk的计算方法为:
[0030][0031]
其中,μ
max
为履带车辆以r=b/2为半径作制动转向时的最大转向阻力系数,r为实际转向半径,a、b、ke为通过拟合得到的设定系数,g为重力加速度。
[0032]
有益效果:
[0033]
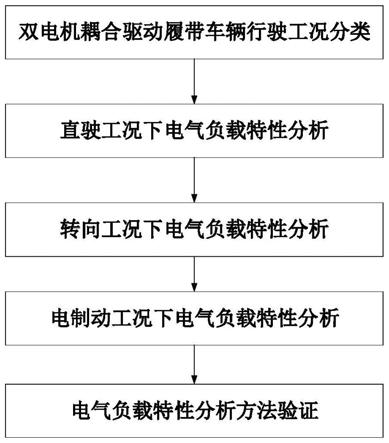
本发明提供一种双电机耦合驱动履带车辆电气负载特性分析方法,首先将双电机耦合驱动重型履带车辆复杂的行驶工况分为直驶工况、转向工况和制动工况三大类,然后考虑加速踏板开度、制动踏板开度和方向盘转角等驾驶员意图,直驶阻力系数、转向阻力系数、转向半径等每类驾驶工况独特的因素,从而结合整车参数预估双电机耦合驱动重型履带车辆完成平移运动和旋转运动所需求的电功率,搭建出双电机耦合驱动重型履带车辆电气负载特性预估模型,从而获得前功率链的用电负载特性,进而能够以此为基础设计发电机的优化控制策略,以保证前功率链及时足量受控地提供电功率,实现供电稳定性控制;本发明适用于所有装备机电复合传动系统的履带车辆,对机电复合传动产品开发,以及双电机耦合驱动技术在履带车辆上的应用具有重大的进步意义。
附图说明
[0034]
图1为本发明提供的一种双电机耦合驱动履带车辆电气负载特性分析方法的流程图;
[0035]
图2为本发明提供的一种双电机耦合驱动履带车辆电气负载特性分析流程细节图;
[0036]
图3为驱动电机转速对比图;
[0037]
图4为驱动电机转矩对比图;
[0038]
图5为驱动电机功率对比图;
[0039]
图6为主动轮转速对比图;
[0040]
图7为主动轮转矩对比图;
[0041]
图8为车速对比图。
具体实施方式
[0042]
为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。
[0043]
机电复合传动履带车辆的行驶工况复杂多变,不同的车速和转向半径下,主动轮所需的驱动电机功率有着很大差别,且变动剧烈。车载电网的后功率链用电负载也因之发生着较高频率较高幅值且规律性不明显的变动。因此,将双电机耦合驱动重型履带车辆复杂行驶工况分为直驶工况、加速工况、转向工况、制动工况等,涵盖急加速、高速转向等极限工况。
[0044]
如图1所示,为本发明提供的一种双电机耦合驱动履带车辆电气负载特性分析方法的流程图。
[0045]
第一方面,直驶工况下的履带车辆电气负载特性分析如下:
[0046]
根据当前实际负载功率p
lk
及油门踏板开度增量δsa来预估负载功率计算公式为:
[0047][0048]
其中,0是初始时刻,k是后面的每一时刻,为初始时刻的负载功率估计值,f为设定的车辆路面滚动阻力系数,g为整车质量,η为履带至电机传动效率,rz为车辆的主动轮半径,sa0为加速踏板初始值,n
max
为电机最高转速,ic为侧传动比,ib为emt变速机构传动比,ij为电机减速传动比,p
gmax
为发电机最大输出功率,为k时刻的负载功率估计值,p
lk
为k时刻的实际负载功率,δp
lk
为k时刻的负载功率增量,δsa为油门踏板开度增量,t
max
为单侧电机最大输出扭矩,vk为k时刻的车速。
[0049]
第二方面,转向工况下的履带车辆电气负载特性分析如下:
[0050]
履带车辆平移运动消耗功率的传统计算方法为:
[0051][0052]
履带车辆旋转运动消耗功率的传统计算方法为:
[0053][0054]
其中,l为履带接地长,ρ为相对转向半径,v为车辆行驶速度,μ为转向阻力系数,b
为履带中心距;
[0055]
基于此,本发明提出的履带车辆平移运动消耗功率预估方法如下:
[0056][0057][0058]
其中,其中,为k时刻履带车辆平移运动消耗功率的估计值,p
pyk
为k时刻履带车辆平移运动消耗功率的实际值,δp
pyk
为k时刻履带车辆平移运动消耗功率的增量,δvk为k时刻的车速增量;
[0059]
本发明提出的履带车辆旋转运动消耗功率预估方法如下:
[0060][0061][0062]
其中,为k时刻履带车辆旋转运动消耗功率的估计值,p
xzk
为k时刻履带车辆旋转运动消耗功率的实际值,μk为k时刻的转向阻力系数,ρk为k时刻的相对转向半径,l为履带接地长,b为履带中心距,δρ为相对转向半径增量;ko为功率耦合机构行星排参数,n
2k
为高速侧电机转速,n
1k
为低速侧电机转速。
[0063]
需要说明的是,相对转向半径与方向盘转角的映射关系如下:
[0064][0065]
式中,k
ib
为与挡位有关的转向半径调整系数;ss为方向盘转角信号归一化值。因此,可以得到本发明的相对转向半径增量为:
[0066][0067]
式中,δss表示方向盘转角变化值。
[0068]
一般转向时,负载功率预估如下:
[0069][0070]
需要说明的是,转向时负载计算的关键点在于转向阻力系数的确定,在传统的转向动力学研究中,传统的转向阻力系数计算多采用尼基金模型:
[0071]
[0072]
式中:μw为转向阻力系数,μ
max
为履带车辆以r=b/2作制动转向时的最大转向阻力系数,r为实际转向半径,a为由试验数据拟合所得的系数;ρ为相对转向半径,ρ=r/b,当制动转向时,即ρ=1/2,μw=μ
max
。
[0073]
当假设履带接地压力均匀分布时,传统方法计算转向阻力矩m
μ
,其表达式为:
[0074][0075]
式中:μw为转向阻力系数;g为整车质量;l为履带接地长。
[0076]
需要说明的是,地面摩擦系数μ、土壤剪切模量k以及车辆行驶速度v、相对转向半径是转向阻力系数的关键影响参量。但在这四组参量中,v与ρ的直观性更强,尤其常用于驾驶员的操纵和履带车辆的传动系统控制分析中,因此将二者作为拟合模型的主元,其余参量则作为主元的标定系数加以表征。
[0077]
转向阻力中有一部分为两侧履带转向阻力矩的和,即不考虑转向离心力时的转向阻力矩。当不考虑转向离心力影响时,可以认为转向阻力矩及阻力系数只和转向半径有关。另一部分不仅与转向时的转向半径有关,而且还与转向时的车速有关,即反映转向时离心力的影响,该部分表示为v2/r的函数。
[0078]
因而,考虑转向离心力影响时,总的转向阻力系数可以表示为:
[0079][0080]
上式右侧第一项仍可用经典尼基金表达式来表示,而右侧第二项可以表示ke(v2/gr),因而基于上式,可以得到本发明的转向阻力系数μk的表达式:
[0081][0082]
其中,μ
max
为履带车辆以r=b/2为半径作制动转向时的最大转向阻力系数,r为实际转向半径,a、b、ke为通过拟合得到的设定系数,g为重力加速度。
[0083]
第三方面,制动工况下的履带车辆电气负载特性如下:
[0084]
当履带车辆为滑行制动时:
[0085][0086]
其中,nk为电机k时刻的转速,t
max
(nk)为转速nk下电机可输出的最大制动扭矩,p
mmax
为单侧电机最大功率;
[0087]
当履带车辆为电制动时:
[0088][0089]
其中,0<sb<s
belec
,s
bk
为k时刻的制动踏板信号归一化后的值,s
belec
为制动踏板信号最大值。
[0090]
由此可见,如图2所示,本发明首先将双电机耦合驱动重型履带车辆复杂的行驶工况分为直驶工况、转向工况和制动工况三大类,然后考虑加速踏板开度、制动踏板开度和方
向盘转角等驾驶员意图,直驶阻力系数、转向阻力系数、转向半径等每类驾驶工况独特的因素,从而结合整车参数预估双电机耦合驱动重型履带车辆完成平移运动和旋转运动所需求的电功率,搭建出双电机耦合驱动重型履带车辆电气负载特性预估模型,最后通过实车道路试验数据验证电气负载特性预估模型的精度。
[0091]
下面分别在直驶工况、转向工况和制动工况下进行双电机耦合驱动重型履带车辆行驶试验,利用实车道路试验的数据结果,对前述用电负载算法进行验证。在水泥环形跑道上进行车辆转向试验以测得的驱动电机转速为输入条件,进行仿真计算。图3~图8所示分别表示为水泥路面转向条件下,两侧电机转速、电机输出扭矩、电机输出功率、两侧主动轮转速、两侧主动轮转矩、车辆质心纵向速度的试验值与仿真值对比结果。从图中看出,无论是运动学特性还是动力学特性,计算结果与试验结果均具有很好的一致性。
[0092]
至此,本发明利用实车道路试验的数据结果,对本发明提供的一种双电机耦合驱动履带车辆在不同工况下的电气负载特性分析方法进行了验证。本发明针对双电机耦合驱动履带车辆开发和履带车辆复杂的行驶工况,通过对用电负载功率的准确预测,将其作为电力功率源(即发动机-发电机与动力电池)目标输出功率,提高发动机-发电机功率输出响应,并且通过合理分配发动机-发电机及动力电池的输出功率,以解决车辆行驶功率和车载大功率用电装置的快速、可靠地用电需求问题,实现高品质供电,并抑制电网污染,提高供电稳定性。
[0093]
当然,本发明还可有其他多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员当然可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1