自动驾驶装置、自动驾驶方法以及多个非暂时性存储介质与流程
1.本发明涉及自动驾驶装置、自动驾驶方法以及多个非暂时性存储介质。
背景技术:
2.日本特开2018-077649中公开了与自动驾驶车辆的远程操作相关的技术。根据该技术,在自动驾驶变得困难的情况下,在车辆与远程操作管理设备之间进行通信,由远程操作者来对车辆进行远程驾驶。
3.作为在一个车辆中实现自动驾驶和远程操作的方法,可以考虑分别单独搭载自动驾驶用的ecu(electronic control unit:电子控制单元)和远程操作用的ecu。当然也有在一个ecu上使自动驾驶用的应用程序和远程操作用的应用程序进行动作这样的方法。但是,在后者的方法的情况下,各应用程序会大量消耗计算资源,因此会对ecu施加高负荷。因此,需要高性能的ecu,从而导致成本增加。此外,在后者的情况下,在该ecu停机(down)的情况下,既无法进行自动驾驶也无法进行远程操作。就是说,无论从成本的观点来看还是从故障保护的观点来看,前者的方法都是现实的。
4.另一方面,在包括ev(electric vehicle:电动汽车)、phv(plug-in hybrid vehicle:插电式混合动力汽车)的自动驾驶车辆中,为了减少电池的消耗并且延长续航距离,要求进一步的省电化。ecu也会消耗电力,因此如果增加搭载的ecu的数量,与之相应地,整体的消耗电力会变大。因此,如果分别单独搭载自动驾驶用的ecu和远程操作用的ecu,则需要为了抑制电力消耗而下一些功夫。
技术实现要素:
5.本公开提供能在能进行自动驾驶和远程操作的车辆中抑制由ecu引起的电力消耗的技术。
6.本公开的第一方案是搭载于车辆的自动驾驶装置。所述自动驾驶装置具备:第一ecu,被配置为对车辆进行自动驾驶;以及第二ecu,被配置为按照来自外部的远程操作使车辆进行动作。第一ecu被配置为在第二ecu使车辆进行动作的期间保持起动状态,第二ecu被配置为在第一ecu对车辆进行自动驾驶的期间保持省电状态。
7.在所述第一方案中,第二ecu也可以被配置为接受来自第一ecu的起动指示而从省电状态向起动状态转移,第二ecu也可以被配置为接受来自第一ecu的省电指示而从起动状态向省电状态转移。
8.在所述第一方案中,也可以是,所述自动驾驶装置还具备:第三ecu,该第三ecu被配置为:在从远程操作向自动驾驶的切换时或从自动驾驶向远程操作的切换时,对从第一ecu输出的控制信息和从第二ecu输出的控制信息进行仲裁。
9.本公开的第二方案是通过至少两个ecu来对车辆进行自动驾驶的自动驾驶方法。所述自动驾驶方法包括:通过第一ecu来对车辆进行自动驾驶;通过第二ecu来按照来自外部的远程操作使车辆进行动作;在第二ecu使车辆进行动作的期间将第一ecu保持为起动状
态;以及在第一ecu对车辆进行自动驾驶的期间将第二ecu保持为省电状态。
10.在所述第二方案中,也可以是,所述自动驾驶方法包括:根据来自所述第一ecu的起动指示来使所述第二ecu从所述省电状态向起动状态转移;以及根据来自所述第一ecu的省电指示来使所述第二ecu从所述起动状态向所述省电状态转移。
11.在所述第二方案中,也可以是,所述自动驾驶方法包括:在从所述远程操作向自动驾驶的切换时或从所述自动驾驶向所述远程操作的切换时,通过第三ecu对从所述第一ecu输出的控制信息和从所述第二ecu输出的控制信息进行仲裁。
12.本公开的第三方案是多个非暂时性存储介质。所述多个非暂时性存储介质包括:第一非暂时性存储介质,储存有命令,该命令能由搭载于车辆的第一ecu执行并且使所述第一ecu执行第一功能;以及第二非暂时性存储介质,储存有命令,该命令能由搭载于车辆的第二ecu执行并且使所述第二ecu执行第二功能。所述第一功能包括:对车辆进行自动驾驶;以及在第二ecu使车辆进行动作的期间将第一ecu保持为起动状态。所述第二功能包括:按照来自外部的远程操作使车辆进行动作;以及在第一ecu对车辆进行自动驾驶的期间将第二ecu保持为省电状态。
13.在所述第三方案中,所述第一功能也可以包括:对所述第二ecu输出起动指示;以及对所述第二ecu输出省电指示,所述第二功能也可以包括:接受来自所述第一ecu的所述起动指示而从所述省电状态向起动状态转移;以及接受来自所述第一ecu的所述省电指示而从所述起动状态向所述省电状态转移。
14.在所述第三方案中,也可以是,所述多个非暂时性存储介质包括:第三非暂时性存储介质,储存有命令,该命令能由第三ecu执行,并且使所述第三ecu执行在从所述远程操作向自动驾驶的切换时或从所述自动驾驶向所述远程操作的切换时对从所述第一ecu输出的控制信息和从所述第二ecu输出的控制信息进行仲裁。
15.根据本公开的所述第一方案、所述第二方案以及所述第三方案,通过在第一ecu对车辆进行自动驾驶的期间将第二ecu保持为省电状态,能抑制由ecu引起的电力消耗。另一方面,通过在第二ecu使车辆进行动作的期间将第一ecu保持为起动状态,能在成为能进行自动驾驶的状况或者远程操作变得困难的状况时迅速地从远程操作向自动驾驶切换。
附图说明
16.以下,参照附图,对本发明的示例性实施例的特征、优点以及技术和工业意义进行说明,其中,相同的附图标记表示相同的元件,其中:
17.图1是概略性地表示使用了本公开的实施方式的自动驾驶车辆的远程操作系统的构成的图。
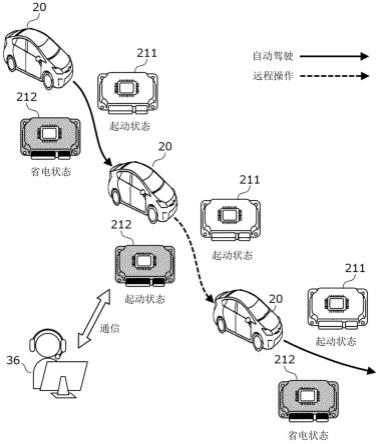
18.图2是对本公开的实施方式的自动驾驶装置的动作的概要进行说明的图。
19.图3是表示本公开的实施方式的自动驾驶装置的构成的一个例子的框图。
20.图4是表示本公开的实施方式的自动驾驶方法的流程图。
21.图5是表示从自动驾驶向远程操作的转移时的自动驾驶ecu和远程操作ecu的各动作的序列图。
22.图6是表示从远程操作向自动驾驶的转移时的自动驾驶ecu和远程操作ecu的各动作的序列图。
具体实施方式
23.以下,参照附图对本公开的实施方式进行说明。其中,在以下所示的实施方式中提及了各要素的个数、数量、量、范围等数值的情况下,除了特别明示的情况、原理上明显确定为该数值的情况之外,本公开的技术构思并不限定于该提及的数值。此外,就在以下所示的实施方式中说明的构造等而言,除了特别明示的情况、在原理上明显确定为该构造等的情况之外,在本公开的技术构思中并不一定是必须的。
24.1.远程操作系统的概略构成
25.图1是概略性地表示在本实施方式中通用的远程操作系统的构成的图。远程操作系统100是从远程操作中心30对自动驾驶车辆20进行远程操作的系统。作为自动驾驶车辆20的自动驾驶等级,例如假定为等级4或等级5。以下,将自动驾驶车辆20仅称为车辆20。在车辆20搭载有自动驾驶装置21。自动驾驶装置21具备:第一ecu(electronic control unit:电子控制单元)211,对车辆进行自动驾驶;以及第二ecu212,按照来自外部的远程操作使车辆20进行动作。以下,将作为自动驾驶用的ecu的第一ecu211称为自动驾驶ecu211,将作为远程操作用的ecu的第二ecu212称为远程操作ecu212。
26.本公开中的远程操作包括远程支持和远程驾驶。在车辆20难以继续进行自动驾驶的情况下或者在被预测为难以继续进行自动驾驶的情况下,由远程操作者36基于来自车辆20的委托进行远程支持和远程驾驶。
27.在远程支持中,远程操作者36进行用于通过车辆20进行的自动驾驶的判断的一部分。在车辆20中进行与驾驶所需的认知、判断以及操作相关的基本的计算。远程操作者36基于从车辆20发送的信息来判断车辆20应该采取的行动,并对车辆20进行指示。从远程操作者36对车辆20发送的远程支持的指示中包括车辆20的行进的指示和车辆20的停止的指示。此外,远程支持的指示中也可以包括针对前方的障碍物的偏移回避的指示、先行车的超越的指示、紧急退避的指示等。
28.在远程驾驶中,远程操作者36进行车辆20的驾驶,详细而言,进行转向操作或加减速操作中的至少一部分。在远程驾驶中,由远程操作者36承担驾驶所需的认知、判断以及操作。远程操作者36从远程的场所以与在车辆20的驾驶席进行的驾驶相同的方式驾驶车辆20。不过,在远程驾驶中,不一定需要远程操作者36进行认知、判断以及操作的全部。也可以通过车辆20的功能来辅助认知、判断以及操作中的至少一部分。
29.在远程操作中心30设置有服务器32和远程操作终端34。车辆20经由包括4g、5g的通信网络10连接于服务器32。能与服务器32进行通信的车辆20的台数为1台以上,优选为多台。服务器32接收从车辆20发出的远程操作的委托。服务器32基于远程操作的委托的内容(例如,是远程支持的委托还是远程驾驶的委托)来选定应对委托的远程操作者36。
30.远程操作终端34是用于由远程操作者36操作的远程操作的接口(hmi:human machine interface;人机接口)。远程操作终端34具备:信息输出部,对远程操作者36输出车辆20的远程操作所需的信息;以及操作输入部,输入用于远程操作者36的远程操作的操作。信息输出部例如包括:显示器,输出由车辆20的摄像机拍摄到的图像;以及扬声器,输出由车辆20的麦克风收集到的声音。如果操作输入部是远程支持用,则可以举例示出按钮、杆以及触摸面板。远程驾驶用的操作输入部中例如包括方向盘、加速踏板、制动踏板、方向指示器的操作杆以及擦拭器的操作杆。用于远程驾驶的远程操作终端34和用于远程支持的远
程操作终端34既可以是不同终端,也可以是通用终端。远程操作终端34至少设有1台以上,优选设有多台。与远程操作终端34的台数相应的人数的远程操作者36在远程操作中心30待命。
31.远程操作终端34经由包括lan(local area network:局域网)、因特网的通信网络连接于服务器32。需要说明的是,远程操作中心30不一定需要是实际存在的设施。在此,将远程操作终端34与服务器32通过通信网络连接而成的系统称为远程操作中心30。因此,也可以是,在云上设置服务器32,在各地的卫星办公室、远程操作者36的自己家中设置远程操作终端34。
32.2.自动驾驶装置的动作的概要
33.图2是对自动驾驶装置21的动作的概要进行说明的图。在图2中通过箭头线的线型示出了由自动驾驶装置21进行控制的车辆20的控制状态。由实线的箭头线示出的车辆20的行驶路径表示车辆20正在被自动驾驶。由虚线的箭头线示出的车辆20的行驶路径表示车辆20正在被远程操作。
34.车辆20的自动驾驶由自动驾驶ecu211进行。当然,在正在进行自动驾驶的期间,自动驾驶ecu211保持起动状态。在此期间,不利用远程操作ecu212的远程操作功能,因此远程操作ecu212能保持为省电状态。需要说明的是,省电状态中包括将远程操作ecu212的电源设为断开以及设为休眠(sleep)状态。此外,如果能实现省电,则省电状态中也可以包括cpu(central processing unit:中央处理器)、gpu(graphics processing unit:图形处理器)等不执行计算的内部计算模块的断开。
35.另一方面,车辆20的远程操作由远程操作ecu212按照来自远程操作者36的指示进行。详细而言,在远程操作者36与远程操作ecu212之间进行通信,远程操作ecu212按照从远程操作者36接收到的指示使车辆20进行动作。在此期间,不利用自动驾驶ecu211的自动驾驶功能,因此作为抑制电力消耗的一个方案,可以考虑将自动驾驶ecu211设为省电状态。但是,若在远程操作的执行中将自动驾驶ecu211设为省电状态,则会由于无法进行是否能实施自动驾驶的判断而无法进行从远程操作向自动驾驶的转移。对于该课题,将在以下进行详细说明。
36.首先,是否能实施自动驾驶的判断要素例如以下这样。
37.要素a:车辆外的行驶环境条件
38.作为该判断要素的具体例子,可以举出由于地图不完备而无法进行自动驾驶、由于进行了施工而可能会进行了地形/交通规则的变更从而无法进行自动驾驶等。
39.要素b:传感器等的硬件状态
40.作为该判断要素的具体例子,可以举出由于污垢而自动驾驶所需的传感器不动作、由于照度不合适而无法利用自动驾驶所需的摄像机、由于雨/雾而无法利用自动驾驶所需的lidar(激光雷达)等。此外,作为该判断要素的具体例子,还可以举出由于gps无法接收卫星信号而无法进行自身位置推定。
41.要素c:其他硬件状态和软件状态
42.作为该判断要素的具体例子,可以举出由于自动驾驶所需的硬件的破损/热失控/挂起(hang)而无法执行自动驾驶、由于软件的异常而无法执行自动驾驶等。
43.要素d:自动驾驶对当场状况的适应性
44.如果是能进行等级5的完全自动驾驶的车辆,则也许可能会能应对所有状况。但是,在等级4以下的自动驾驶车辆中,此外,即使是等级5的自动驾驶车辆,有时如果不在当场实际进行计算,就做不出是否能实施自动驾驶的判断。
45.如以上那样,在是否能实施自动驾驶的判断要素中,不仅包括要素a这样的由外部因素唯一地决定的要素,还包括要素d这样的不实际使自动驾驶ecu211进行动作就做不出判断的要素。
46.就搭载有自动驾驶ecu211和远程操作ecu212的车辆20而言,若考虑远程操作所需的人工费,则理想的是尽可能由自动驾驶ecu211持续承担车辆控制。假如在判定为无法继续进行自动驾驶时,例如,即使远程操作ecu212处于省电状态,自动驾驶ecu211也可以调用远程操作ecu212。因此,即使在自动驾驶的执行时将远程操作ecu212设为省电状态,也能进行从自动驾驶向远程操作的转移。
47.另一方面,如上所述,是否能实施自动驾驶的判断要素中不仅包括要素a这样的由外部因素唯一地决定的要素,还包括要素d这样的如果不实际使自动驾驶ecu211进行动作就做不出判断的要素。因此,若在远程操作的执行时自动驾驶ecu211成为省电状态,则无法进行是否能实施自动驾驶的判断。虽然也可以考虑由远程操作者36进行从远程操作向自动驾驶的切换,但对于远程操作者36而言,无法获知自动驾驶ecu211能在哪个定时进行动作。因此,无法进行向自动驾驶的转移,从而远程操作的执行时间会变长。
48.因此,如图2所示的自动驾驶ecu211和远程操作ecu212的各动作状态那样,自动驾驶装置21在自动驾驶的执行时将远程操作ecu212设为省电状态,另一方面,在远程操作的执行时使自动驾驶ecu211并行地起动。就是说,使自动驾驶ecu211持续地动作,另一方面,使远程操作ecu212仅在自动驾驶ecu211调用时进行动作。由此,能实现通过ecu的电力消耗的降低实现的省电化和人工费的降低。
49.3.自动驾驶装置的构成
50.以下,使用图3对能实现图2所示的自动驾驶ecu211和远程操作ecu212的各动作状态的自动驾驶装置21进行说明。图3是表示自动驾驶装置21的构成的一个例子的框图。
51.传感器组22利用can(controller area network:控制器局域网络)等车载网络连接于自动驾驶装置21。传感器组22包括作为用于识别车辆20的周围的状况的识别传感器的lidar22a、摄像机22b以及毫米波传感器22c。摄像机22b既可以由自动驾驶用和远程操作用共用,也可以分别设有自动驾驶用的摄像机和远程操作用的摄像机。此外,传感器组22包括作为检测车辆20的位置和方位的位置传感器的gps(global positioning system:全球定位系统)接收器22d。而且,传感器组22包括内部传感器22e。内部传感器22e包括获取与车辆20的运动相关的信息的状态传感器。作为状态传感器,例如举例示出车轮速度传感器、加速度传感器、角速度传感器以及舵角传感器。
52.致动器23利用can等车载网络连接于自动驾驶装置21。致动器23包括对车辆20进行转向的转向装置、对车辆20进行驱动的驱动装置以及对车辆20进行制动的制动装置。转向装置中例如包括动力转向系统、线控转向系统以及后轮转向系统。驱动装置中例如包括发动机、ev系统以及混合动力系统。制动装置中例如包括液压制动器和电力再生制动器。此外,方向指示器、擦拭器等为了使车辆20安全地行驶而需要进行动作的装置也包括在致动器23中。致动器23根据从自动驾驶装置21发送的控制信号进行动作。
53.自动驾驶装置21具备自动驾驶ecu211、远程操作ecu212以及作为第三ecu的车辆控制ecu213。该ecu211、ecu212、ecu213利用can等车载网络进行连接。各ecu211、ecu212、ecu213具备处理器和与处理器耦合的存储器。存储器中存储有能由处理器执行的一个或多个程序和与该程序关联的各种信息。通过处理器执行程序来实现由处理器进行的各种处理。此外,存储器包括主存储装置和辅助存储装置。辅助存储装置具备包括地图数据库在内的各种数据库。
54.自动驾驶ecu211具备自动驾驶系统部211a和远程操作功能控制部211b。它们在由处理器执行了存储于自动驾驶ecu211的存储器的程序时被实现为自动驾驶ecu211的功能。
55.自动驾驶系统部211a基于来自传感器组22的各种检测信息,此外如果需要还基于从存储装置内的各种数据库获取到的信息,来进行是否能实施自动驾驶的判断。该判断中的判断要素如前述那样。并且,如果能实施自动驾驶,则自动驾驶系统部211a生成用于自动驾驶的控制信息(以下,称为自动驾驶控制信息)。此外,自动驾驶系统部211a将与是否能实施自动驾驶的判断结果相应的信号发送至远程操作功能控制部211b。
56.自动驾驶控制信息的生成中可以使用规定的方法。以下,对其一个例子进行说明。首先,基于由gps接收器22d接收到的车辆20的位置信息、由内部传感器22e检测到的与车辆20的运动相关的信息以及从地图数据库获得的地图信息来识别地图上的车辆20的位置。此外,获取通过lidar22a、摄像机22b以及毫米波传感器22c得到的检测信息。然后,利用图案匹配、深度学习等方法来识别车辆20的周围的物体,并进行该物体的存在位置和类别的确定。位置和类别被确定后的物体作为物标被输出。接着,基于记录于地图数据库的路径和物标信息来制作车辆20的行驶计划。行驶计划被制作为在路径上车辆20遵照安全、遵守法规、行驶效率等基准而适当地行驶。
57.自动驾驶系统部211a基于如此制作出的行驶计划来生成目标轨迹。目标轨迹包括固定于车辆20的坐标系中的车辆20的目标位置的集合和各目标点处的目标速度。自动驾驶系统部211a将所生成的目标轨迹作为自动驾驶控制信息输出。作为另一个方案,也可以是,自动驾驶系统部211a算出用于使车辆20追随目标轨迹的致动器控制量(例如,转向角、踏板踩踏量等),并将致动器控制量作为自动驾驶控制信息输出。作为又一个方案,也可以是,基于行驶计划来制作车辆20可以行驶的空间,并将该空间作为自动驾驶控制信息输出。此外,在行驶计划中包括车道变更、交叉路口处的左转/右转的情况下,方向指示器的接通/断开操作也可以包括在自动驾驶控制信息中。
58.远程操作功能控制部211b基于来自自动驾驶系统部211a的信号来对远程操作ecu212发送起动信号或停止信号。详细而言,如果能进行自动驾驶,则远程操作功能控制部211b对远程操作ecu212发送停止信号,并将远程操作ecu212设为省电状态。反之,如果不能进行自动驾驶,则远程操作功能控制部211b对远程操作ecu212发送起动信号来起动远程操作ecu212。
59.远程操作ecu212具备远程操作系统部212a。远程操作系统部212a在由处理器执行了存储于远程操作ecu212的存储器的程序时被实现为远程操作ecu212的功能。需要说明的是,存储于远程操作ecu212的存储器的程序与存储于自动驾驶ecu211的存储器的程序一起构成使自动驾驶装置21发挥功能的程序集。
60.远程操作系统部212a与服务器32进行通信,将远程操作所需的信息发送至服务器
32。发送至服务器32的信息中包括来自传感器组22的各种检测信息,该各种检测信息中包括由摄像机22b获取到的图像,此外如果需要还包括从存储装置内的各种数据库获取到的信息。此外,如果对远程操作有用,则从道路交通信息系统获取到的道路交通信息等从远程操作系统100的外部获取到的信息也可以包括在发送信息中。从远程操作系统部212a发送至服务器32的信息由服务器32进行处理并被发送至远程操作终端34。
61.此外,远程操作系统部212a与服务器32进行通信,从服务器32接收用于远程操作的远程操作信号。远程操作信号是远程操作者36输入至远程操作终端34的信号。在进行远程驾驶的情况下,远程操作信号例如是通过转向操作、踏板操作而生成的远程驾驶信号。在进行远程支持的情况下,远程操作信号例如是通过按钮、杆的操作而生成的远程支持信号。
62.远程操作系统部212a根据从服务器32接收到的远程操作信号生成用于远程操作的控制信息(以下,称为远程操作控制信息)。远程操作控制信息只要能实现车辆20的控制即可,可以是任何信息。例如,也可以生成致动器控制量来作为远程操作控制信息。在该情况下,例如,如果没有通信中断/延迟的问题,则可以生成每小时控制量来作为远程操作控制信息。或者,也可以是,为了使通信中断/延迟具有鲁棒性,将根据当前的控制量而预计的将来的控制量附加于每小时控制量。例如,也可以附加前述的车辆20可以行驶的空间这样的信息。需要说明的是,确保通信中断/延迟的鲁棒性的功能也可以由后述的车辆控制ecu213来承担。
63.车辆控制ecu213具备控制信息仲裁部213a和致动器控制部213b。它们在由处理器执行了存储于车辆控制ecu213的存储器的程序时被实现为车辆控制ecu213的功能。
64.控制信息仲裁部213a对从自动驾驶系统部211a发送的自动驾驶控制信息和从远程操作系统部212a发送的远程操作控制信息进行仲裁。作为由控制信息仲裁部213a进行的仲裁的作用和方法,可以举出以下的例子。
65.仲裁方法1:仅采用某一方的控制信息的方法
66.远程操作ecu212根据是否能自动驾驶而被起动/停止,因此本来仅从某一方进行控制信息的输入。但是,在时间同步未被保证的系统中,可能会输入两个控制信息。因此,如果能进行自动驾驶,则仅采用自动驾驶控制信息,而拒绝远程操作控制信息。由此,通过控制信息仲裁部213a来保证时间同步。
67.仲裁方法2:仅采用某一方的控制信息,在转移时平滑地连接控制信息的方法
68.若在从自动驾驶向远程操作的转移时或者在从远程操作向自动驾驶的转移时迅速切换控制信息,则在该切换时车辆20的行为不稳定,从而恐怕会给乘客带来不快感。例如,在自动驾驶给出踩踏加速踏板的指示并且远程操作给出松开加速踏板的指示的情况下,在从自动驾驶向远程操作的转移时会产生急减速,在从远程操作向自动驾驶的转移时会产生急加速。因此,进行在这些转移时平滑地连接控制信息的计算。
69.由控制信息仲裁部213a仲裁出的控制信息被发送至后级的致动器控制部213b。致动器控制部213b按照从控制信息仲裁部213a发送的控制信息来计算各致动器23的致动器控制量。然后,致动器控制部213b根据致动器控制量来控制各致动器23。需要说明的是,上述的仲裁方法2中的平滑地连接控制信息是指生成致动器控制量平滑地变化这样的控制信息的意思。
70.4.由自动驾驶装置实现的自动驾驶方法
71.使用图4对由如以上那样构成的自动驾驶装置21实现的自动驾驶方法进行说明。图4是表示由自动驾驶装置21实现的自动驾驶方法的流程图。在流程图中,与各步骤的处理的内容一起示出了处理的主体。需要说明的是,作为一个例子,流程图从由自动驾驶ecu211正在进行自动驾驶的状态开始。
72.首先,在步骤s1中,进行由自动驾驶ecu211进行的控制,即进行自动驾驶。该处理的主体是自动驾驶系统部211a。在步骤s2中,通过自动驾驶系统部211a来判定自动驾驶ecu211是否能继续进行动作。在该判定中,考虑前述的判断要素a-判断要素d。在判断为能继续进行动作的情况下,返回步骤s1,继续由自动驾驶ecu211进行的控制。
73.在步骤s2中判断为不能继续进行动作的情况下,通过远程操作功能控制部211b来进行步骤s3的处理。在步骤s3中,通过远程操作功能控制部211b来起动远程操作ecu212。
74.在步骤s4中,进行由远程操作ecu212进行的控制,即进行远程操作。该处理的主体是远程操作系统部212a。在步骤s5中,通过自动驾驶系统部211a来判定自动驾驶ecu211是否能进行动作。在该判定中,考虑前述的判断要素a-判断要素d。在判断为不能进行动作的情况下,返回步骤s4,继续由远程操作ecu212进行的控制。
75.在步骤s5中判断为能进行动作的情况下,通过自动驾驶系统部211a来进行步骤s6的处理。在步骤s6中,通过自动驾驶系统部211a来开始由自动驾驶ecu211进行的控制。然后,在步骤s7中,通过远程操作功能控制部211b将远程操作ecu212设为省电模式。
76.图5和图6通过序列图来表示以上的自动驾驶方法。图5是表示从自动驾驶向远程操作的转移时的自动驾驶ecu211和远程操作ecu212的各动作的序列图。如图5所示,在从自动驾驶向远程操作的转移时,从自动驾驶ecu211向远程操作ecu212发送省电的解除指示,即发送起动指示。远程操作ecu212接受来自自动驾驶ecu211的省电的解除指示而从省电状态向起动状态转移。当向起动状态的转移完成时,远程操作ecu212向自动驾驶ecu211通知已起动。
77.图6是表示从远程操作向自动驾驶的转移时的自动驾驶ecu211和远程操作ecu212的各动作的序列图。如图6所示,在从远程操作向自动驾驶的转移时,从自动驾驶ecu211向远程操作ecu212发送省电指示,即发送停止指示。远程操作ecu212接受来自自动驾驶ecu211的省电指示而从起动状态向省电状态转移。在向省电状态转移时,从远程操作ecu212向自动驾驶ecu211发送响应信号。
78.5.其他实施方式
79.在上述的实施方式中,根据判断要素a-判断要素d来判断是否能实施自动驾驶。它们是判定是否能进行自动驾驶的计算的要素,但有时会对从自动驾驶向远程操作的转移条件施加某种制约。例如,作为转移时的制约,可以举出以下这样的例子。在自动驾驶系统部211a中的是否能实施自动驾驶的判断中,除了使用判断要素a-判断要素d之外,还可以使用这些制约1-制约3这样的信息。
80.制约1:在转移时速度必须为零。
81.制约2:在转移时必须使转向角恢复中立。
82.制约3:在从远程操作向自动驾驶的转移时,必须使车辆20在例如巴士站这样的规定的地点停车。
83.在上述的实施方式中,在自动驾驶系统部211a中进行是否能实施自动驾驶的判断
和在能实施自动驾驶的情况下的自动驾驶控制信息的生成。也可以分别设置这两个功能。即,也可以设置自动驾驶实施可否判断部、自动驾驶控制信息生成部以及前述的远程操作功能控制部来作为自动驾驶ecu211的功能。
84.此外,上述的实施方式中的远程操作ecu212也可以被配置为远程支持用的远程支持ecu和远程驾驶用的远程驾驶ecu的集合。在该情况下,也可以是,在执行远程支持的情况下,在远程驾驶ecu保持省电状态的状态下仅远程支持ecu被起动,在执行远程驾驶的情况下,在远程支持ecu保持省电状态的状态下远程驾驶ecu被起动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1