紧急制动触发方法、装置、电子设备和车辆与流程
本发明涉及车辆,尤其涉及一种紧急制动触发方法、装置、电子设备和车辆。
背景技术:
1、自动紧急制动系统(aebs,advanced emergency braking system)是通过一个前视摄像头和一个前向中长距毫米波雷达对前方车辆、行人和障碍物等进行探测,并在可能发生碰撞危险时自动启动车辆制动系统使车辆减速,以避免车辆发生碰撞或减轻碰撞后果。
2、相关技术中,由于毫米波雷达的多径效应以及摄像头易受天气、光线影响等容易同时产生虚假目标,从而易产生虚假的融合目标。若虚假的融合目标的碰撞时间满足aeb(autonomous emergency braking,自动刹车系统)触发条件,则导致aeb误触发。
技术实现思路
1、本发明实施例提供一种紧急制动触发方法、装置、电子设备和车辆,旨在通过融合目标约束条件去除虚假融合目标,从而避免由于虚假融合目标引发的aeb误触发。
2、为了解决上述技术问题,本发明是这样实现的:
3、第一方面,本技术实施例提供了一种紧急制动触发方法,包括:
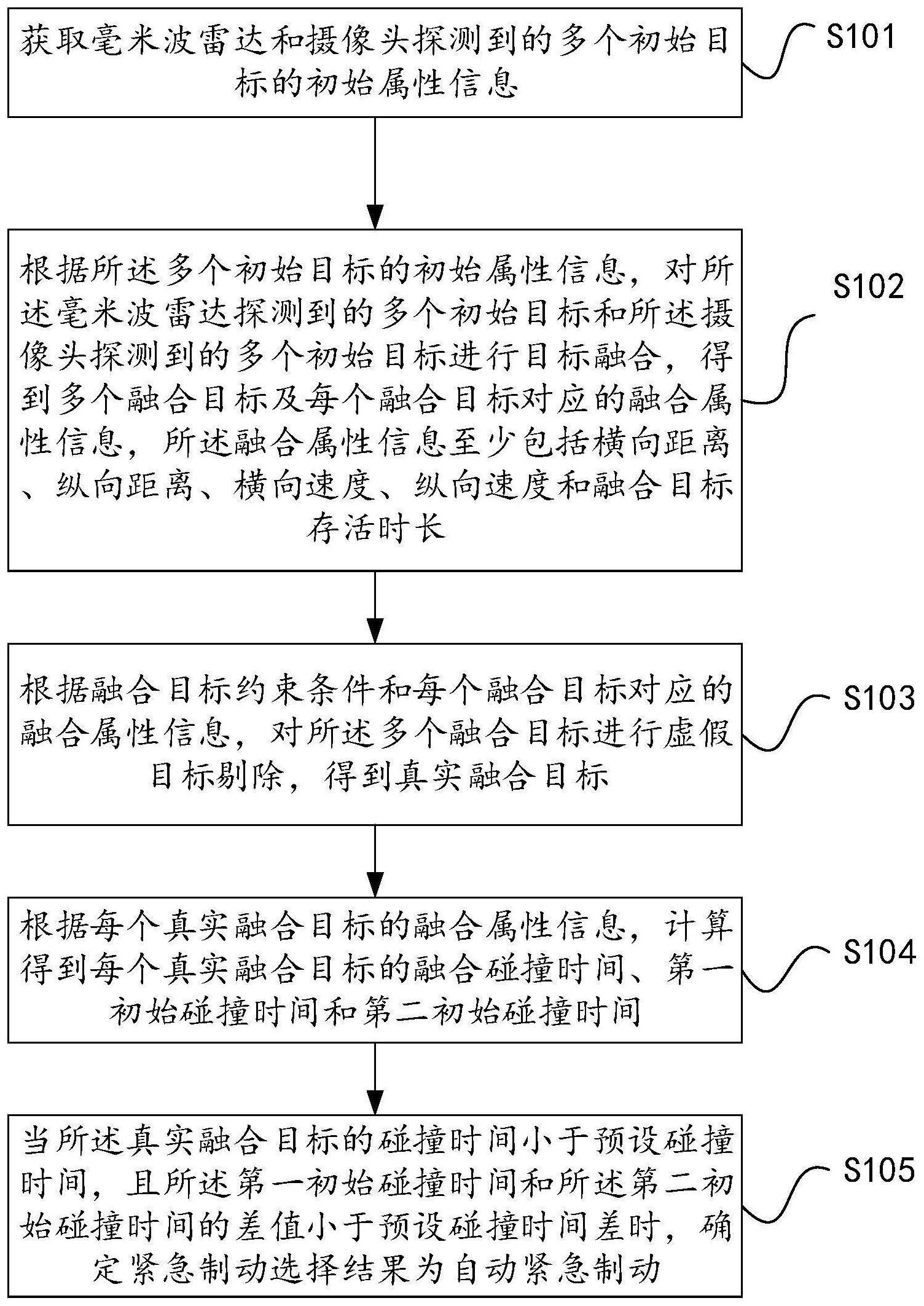
4、获取毫米波雷达和摄像头探测到的多个初始目标的初始属性信息;
5、根据所述多个初始目标的初始属性信息,对所述毫米波雷达探测到的多个初始目标和所述摄像头探测到的多个初始目标进行目标融合,得到多个融合目标及每个融合目标对应的融合属性信息,所述融合属性信息至少包括横向距离、纵向距离、横向速度、纵向速度和融合目标存活时长;
6、根据融合目标约束条件和每个融合目标对应的融合属性信息,对所述多个融合目标进行虚假目标剔除,得到真实融合目标;
7、根据每个真实融合目标的融合属性信息,计算得到每个真实融合目标的融合碰撞时间、第一初始碰撞时间和第二初始碰撞时间;
8、当所述真实融合目标的碰撞时间小于预设碰撞时间,且所述第一初始碰撞时间和所述第二初始碰撞时间的差值小于预设碰撞时间差时,确定紧急制动选择结果为自动紧急制动。
9、可选地,所述融合目标约束条件至少包括以下一者:
10、所述毫米波雷达和所述摄像头探测到的横向距离的差值小于预设横向距离差;
11、所述融合目标存活时长大于第一预设存活时长;
12、所述毫米波雷达和所述摄像头探测到的纵向距离的差值小于预设纵向距离差;
13、所述毫米波雷达和所述摄像头探测到的纵向速度的差值小于预设纵向速度差;
14、所述融合目标为车辆时,该融合目标的存活时长大于第二预设存活时长;所述融合目标为行人时,该融合目标的存活时长大于第三预设存活时长,所述第二预设存活时长大于所述第三预设存活时长。
15、可选地,根据所述多个初始目标的初始属性信息,对所述毫米波雷达探测到的多个初始目标和所述摄像头探测到的多个初始目标进行目标融合,得到多个融合目标及每个融合目标对应的融合属性信息,包括:
16、对所述毫米波雷达和摄像头探测到的多个初始目标的初始属性信息进行参数统一,得到毫米波雷达和摄像头探测到的多个初始目标的更新属性信息;
17、根据所述多个初始目标的更新属性信息,对所述毫米波雷达探测到的多个初始目标与所述摄像头探测到的多个初始目标进行关联,得到所述毫米波雷达探测到的多个筛选目标与所述摄像头探测到的多个筛选目标之间的最优关联结果;
18、根据所述最优关联结果,对所述毫米波雷达探测到的多个初始目标与所述摄像头探测到的多个初始目标中相互关联的初始目标进行目标融合,得到多个融合目标及每个融合目标对应的融合属性信息。
19、可选地,所述真实融合目标的所述第一初始碰撞时间和所述第二初始碰撞时间通过以下方法得到:
20、获取所述真实融合目标的融合属性信息中包含的毫米波雷达和摄像头探测到的更新属性信息;
21、根据所述真实融合目标的毫米波雷达探测到的更新属性信息,得到所述第一初始碰撞时间;
22、根据所述真实融合目标的毫米波雷达探测到的更新属性信息,得到所述第二初始碰撞时间。
23、可选地,所述更新属性信息包括所述初始目标到车辆的距离、毫米波雷达速度标准差和摄像头稳定跟踪帧数;
24、根据所述多个初始目标的更新属性信息,对所述毫米波雷达探测到的多个初始目标与所述摄像头探测到的多个初始目标进行关联,得到所述毫米波雷达探测到的多个筛选目标与所述摄像头探测到的多个筛选目标之间的最优关联结果,包括:
25、根据所述初始目标到车辆的距离、所述毫米波雷达速度标准差和所述摄像头稳定跟踪帧数,确定摄像头噪声强度值和毫米波雷达噪声强度值;
26、根据所述摄像头噪声强度值和所述毫米波雷达噪声强度值,确定所述毫米波雷达探测到的多个初始目标的融合权重以及所述摄像头探测到的多个初始目标的融合权重,所述摄像头探测到的多个初始目标的融合权重与所述摄像头噪声强度值负相关,所述毫米波雷达探测到的多个初始目标的融合权重与所述毫米波雷达噪声强度值负相关;
27、根据所述毫米波雷达探测到的多个初始目标的融合权重以及所述摄像头探测到的多个初始目标的融合权重,得到所述毫米波雷达探测到的多个初始目标与所述摄像头探测到的多个初始目标之间的最优关联结果。
28、可选地,在在根据所述毫米波雷达探测到的多个初始目标的融合权重以及所述摄像头探测到的多个初始目标的融合权重,得到所述毫米波雷达探测到的多个初始目标与所述摄像头探测到的多个初始目标之间的最优关联结果的步骤之前,所述方法还包括:
29、针对所述毫米波雷达探测到的多个筛选目标中的每一个初始目标,当所述初始目标为单雷达目标,且所述初始目标的横向距离小于预设横向距离,且所述初始目标的横向速度绝对值大于预设横向速度绝对值,且所述初始目标为递推状态,且所述初始目标的检测帧数小于预设帧数时,对所述初始目标进行剔除。
30、可选地,所述融合目标的融合属性信息通过以下方法得到:
31、将所述摄像头探测到的横向距离确定为所述融合目标的融合横向距离;
32、将所述毫米波雷达探测到的纵向距离确定为所述融合目标的融合纵向距离;
33、将所述摄像头探测到的横向速度确定为所述融合目标的融合横向速度;
34、将所述毫米波雷达探测到的纵向速度确定为所述融合目标的融合纵向速度。
35、第二方面,本发明实施例提供了一种紧急制动触发装置,包括:
36、获取模块,用于获取毫米波雷达和摄像头探测到的多个初始目标的初始属性信息;
37、融合模块,用于根据所述多个初始目标的初始属性信息,对所述毫米波雷达探测到的多个初始目标和所述摄像头探测到的多个初始目标进行目标融合,得到多个融合目标及每个融合目标对应的融合属性信息,所述融合属性信息至少包括横向距离、纵向距离、横向速度、纵向速度和融合目标存活时长;
38、剔除模块,用于根据融合目标约束条件和每个融合目标对应的融合属性信息,对所述多个融合目标进行虚假目标剔除,得到真实融合目标;
39、计算模块,用于根据每个真实融合目标的融合属性信息,计算得到每个真实融合目标的融合碰撞时间、第一初始碰撞时间和第二初始碰撞时间;
40、确定模块,用于当所述真实融合目标的碰撞时间小于预设碰撞时间,且所述第一初始碰撞时间和所述第二初始碰撞时间的差值小于预设碰撞时间差时,确定紧急制动选择结果为自动紧急制动。
41、可选地,所述融合目标约束条件至少包括以下一者:
42、所述毫米波雷达和所述摄像头探测到的横向距离的差值小于预设横向距离差;
43、所述融合目标存活时长大于第一预设存活时长;
44、所述毫米波雷达和所述摄像头探测到的纵向距离的差值小于预设纵向距离差;
45、所述毫米波雷达和所述摄像头探测到的纵向速度的差值小于预设纵向速度差;
46、所述融合目标为车辆时,该融合目标的存活时长大于第二预设存活时长;所述融合目标为行人时,该融合目标的存活时长大于第三预设存活时长,所述第二预设存活时长大于所述第三预设存活时长。
47、可选地,所述融合模块,包括:
48、统一子模块,用于对所述毫米波雷达和摄像头探测到的多个初始目标的初始属性信息进行参数统一,得到毫米波雷达和摄像头探测到的多个初始目标的更新属性信息;
49、关联子模块,用于根据所述多个初始目标的更新属性信息,对所述毫米波雷达探测到的多个初始目标与所述摄像头探测到的多个初始目标进行关联,得到所述毫米波雷达探测到的多个筛选目标与所述摄像头探测到的多个筛选目标之间的最优关联结果;
50、融合子模块,用于根据所述最优关联结果,对所述毫米波雷达探测到的多个初始目标与所述摄像头探测到的多个初始目标中相互关联的初始目标进行目标融合,得到多个融合目标及每个融合目标对应的融合属性信息。
51、可选地,所述计算模块包括:
52、获取子模块,用于获取所述真实融合目标的融合属性信息中包含的毫米波雷达和摄像头探测到的更新属性信息;
53、第一获得子模块,用于根据所述真实融合目标的毫米波雷达探测到的更新属性信息,得到所述第一初始碰撞时间;
54、第二获得子模块,用于根据所述真实融合目标的毫米波雷达探测到的更新属性信息,得到所述第二初始碰撞时间。
55、可选地,所述更新属性信息包括所述初始目标到车辆的距离、毫米波雷达速度标准差和摄像头稳定跟踪帧数;
56、所述关联子模块,包括:
57、第一确定子单元,用于根据所述初始目标到车辆的距离、所述毫米波雷达速度标准差和所述摄像头稳定跟踪帧数,确定摄像头噪声强度值和毫米波雷达噪声强度值;
58、第二确定子单元,用于根据所述摄像头噪声强度值和所述毫米波雷达噪声强度值,确定所述毫米波雷达探测到的多个初始目标的融合权重以及所述摄像头探测到的多个初始目标的融合权重,所述摄像头探测到的多个初始目标的融合权重与所述摄像头噪声强度值负相关,所述毫米波雷达探测到的多个初始目标的融合权重与所述毫米波雷达噪声强度值负相关;
59、关联子单元,用于根据所述毫米波雷达探测到的多个初始目标的融合权重以及所述摄像头探测到的多个初始目标的融合权重,得到所述毫米波雷达探测到的多个初始目标与所述摄像头探测到的多个初始目标之间的最优关联结果。
60、可选地,在关联子单元之前,所述装置还包括:
61、剔除子单元,用于针对所述毫米波雷达探测到的多个初始目标中的每一个初始目标,当所述初始目标为单雷达目标,且所述初始目标的横向距离小于预设横向距离,且所述初始目标的横向速度绝对值大于预设横向速度绝对值,且所述初始目标为递推状态,且所述初始目标的检测帧数小于预设帧数时,对所述初始目标进行剔除。
62、可选地,所述融合模块包括:
63、第一确定子模块,用于将所述摄像头探测到的横向距离确定为所述融合目标的融合横向距离;
64、第一确定子模块,用于将所述毫米波雷达探测到的纵向距离确定为所述融合目标的融合纵向距离;
65、第一确定子模块,用于将所述摄像头探测到的横向速度确定为所述融合目标的融合横向速度;
66、第一确定子模块,用于将所述毫米波雷达探测到的纵向速度确定为所述融合目标的融合纵向速度。
67、第三方面,本发明实施例另外提供了一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时,实现上述第一方面所述的紧急制动触发方法的步骤。
68、第四方面,本发明实施例另外提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时,实现上述第一方面所述的紧急制动触发方法的步骤。
69、第五方面,本发明实施例另外提供了一种车辆,包括车辆主体和设置在所述车辆主体上的紧急制动触发装置,所述紧急制动触发装置用于执行上述第一方面所述的紧急制动触发方法的步骤。
70、在本发明中,通过获取毫米波雷达和摄像头探测到的多个初始目标的初始属性信息,并根据多个初始目标的初始属性信息,对毫米波雷达探测到的多个初始目标和摄像头探测到的多个初始目标进行目标融合,得到多个融合目标及每个融合目标对应的融合属性信息,融合属性信息至少包括横向距离、纵向距离、横向速度、纵向速度和融合目标存活时长,然后根据融合目标约束条件和每个融合目标对应的融合属性信息,对多个融合目标进行虚假目标剔除,得到真实融合目标,再根据每个真实融合目标的融合属性信息,计算得到每个真实融合目标的融合碰撞时间、第一初始碰撞时间和第二初始碰撞时间,最后,当融合目标的碰撞时间小于预设碰撞时间,且所述第一初始碰撞时间和所述第二初始碰撞时间的差值小于预设碰撞时间差时,确定紧急制动选择结果为自动紧急制动,在得到多个融合目标之后,通过融合目标约束条件去除虚假融合目标,并在真实融合目标的碰撞时间小于预设碰撞时间,且第一初始碰撞时间和第二初始碰撞时间的差值小于预设碰撞时间差时,才确定紧急制动选择结果为自动紧急制动,进一步去除虚假融合目标的干扰,从而避免因虚假融合目标符合aeb触发条件而导致的aeb误触发。
- 还没有人留言评论。精彩留言会获得点赞!