一种地理信息二三维自动化采集系统及方法与流程
1.本发明涉及地理信息采集领域,具体为一种地理信息二三维自动化采集系统及方法。
背景技术:
2.地理信息采集包括图像采集,图像采集又包括二维、三维图像采集,其是通过摄像系统拍摄图片、视屏的方式得到二维、三维图像信息,通过分析记录的信息用于城市规划、土地调查等。
3.专利号为cn109866844b的申请文件公开了一种移动式地理信息系统数据采集装置,包括底板、数据采集设备本体、显示屏和控制按键,所述数据采集设备本体表面的一侧分别设置有显示屏与控制按键,本发明涉及数据采集技术领域。该移动式地理信息系统数据采集装置,通过在数据采集设备本体底部的两侧均固定连接有第一支撑板,两个第一支撑板的底部均固定连接有固定框,固定框内壁底部与顶部之间的两侧分别滑动连接有第一滑块与第二滑块,第一滑块的一侧固定连接有第一拉伸弹簧,这样可以极大程度的减缓数据采集装置在崎岖山路的移动中因为震动导致的机械零部件损坏,有效地延长了数据采集装置的使用寿命,节约数据采集装置的成本消耗。
4.而现有的地理信息采集车中,摄像设备固定于采集车上,车辆行驶于山路或不平整的路面时,车辆处于倾斜状态而导致摄像头并不能够保持在水平的状态下拍摄,以至于因拍摄角度影响数据采集的准确度。
技术实现要素:
5.本发明的目的在于提供一种地理信息二三维自动化采集系统及方法,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:
7.一种地理信息二三维自动化采集系统,包括安装板,所述安装板顶部设置有连接架,所述连接架上连接采集装置,采集装置包括摄像头,摄像头固定于采集管顶部,采集管与连接架通过全方位转动机构连接,采集管底部连接平衡机构,全方位转动机构包括固定于采集管上的截面球囊,球囊外套接有截面球套,摄像头固定于采集管上,采集管外侧固定连接截面球囊与截面球套转动连接,使采集管在一定范围内能够相对于截面球囊以任意角度转动,从而能够在车辆行驶在非平整路面时能够使摄像头保持趋近于水平状态,降低因摄像头倾斜导致所采集数据准确性偏差量。
8.优选的,所述截面球囊为固定于采集管外侧的内部空心的球,截面球囊外侧与截面球套内侧贴合转动连接,截面球囊端部固定直径大于截面的限位环,截面球套的截面半径大于截面球囊的截面半径,截面球囊端部固定直径大于截面的限位环用于限制截面球囊相对于截面球套转动的极限角度。
9.优选的,所述截面球套侧面固定有卡扣,卡扣通过卡接机构与连接架固定,卡接机
构包括固定于连接架上的支撑环,支撑环上固定有倒l形的限位杆,支撑环上滑动连接贯穿支撑环与卡扣卡接的卡杆,卡杆上套接有上端与支撑环固定的弹簧,在截面球套侧面固定的卡扣与连接架上支撑环所固定的限位杆配合,同时通过卡杆固定的方式,使截面球套固定于连接架上,且使截面球套能够被拆卸更换或用于车辆无法达到的地方进行拍摄。
10.优选的,所述采集管包括若干依次套接的滑管,滑管外侧固定有与相邻滑管内滑动连接的滑块,滑块于相邻滑管内侧的滑槽内滑动,位于最外侧的滑管底端通过锁定机构与安装板上的气筒连通,采集管采用可伸长的结构,使摄像头高度可变,适用于在摄像头高度无法达到的情况下调整摄像头高度以满足采集需求。
11.优选的,所述气筒顶端固定有连接套,所述连接套侧面滑动连接锁杆,锁杆有至少两个,且锁杆于连接套侧面的杆套内滑动,杆套与气筒连通,锁杆内端与滑管侧面的插孔插接,杆套侧面中部与连接套连通,气筒所连接的连接套上设置锁杆用于连接采集管,通过气筒内部充气使锁杆与采集管插接,并能够在插接后使气筒内气流向采集管内充气,实现改变采集管顶部的摄像头高度。
12.优选的,所述插孔内侧边缘设置有挡板,且挡板为等腰扇形,所述锁杆外端通过拉力弹簧与杆套内端连接,锁杆内端为圆头,锁杆侧面与杆套内侧贴合滑动连接,插孔侧面设置挡板,并将锁杆设置为圆头,使锁杆在插入到插孔内后相对于挡板滑动调整采集管角度。
13.优选的,所述平衡机构包括与气筒固定连接的平衡杆,平衡杆外端与平衡气囊侧面固定的压板固定,平衡气囊外侧与连接架固定,所述气筒底端固定连接配重块,平衡机构采用平衡气囊作为缓冲,使车辆在颠簸行驶状态下降低采集管的振动幅度,使采集管上连接的摄像头保持相对较为稳定。
14.优选的,所述截面球套底侧转动连接有至少三个连接杆,连接杆外端固定连接有连接挂扣,在高空采集时,连接杆所连接的挂扣与载重无人机连接,至少三个连接杆连接于无人机上,使截面球套相对于无人机保持固定。
15.优选的,至少三个所述连接杆均匀间隔分布于截面球套圆周,挂扣上螺纹连接有锁紧螺栓,锁紧螺栓端部固定有缓冲垫,挂扣连接锁紧螺栓,使挂扣与无人机稳定连接。
16.一种地理信息二三维自动化采集系统的采集方法,将连接架连接于安装板顶部,连接架上连接截面球套,截面球套内转动连接截面球囊,截面球囊与连接有摄像头的采集管连接,并于采集管底部设置平衡机构,通过平衡机构调整,使安装板在处于倾斜状态时,平衡机构使采集管连同截面球囊相对于截面球套转动,从而使采集管始终保持趋近于竖直的状态,降低由于安装板在山路中倾斜导致其上所携带的摄像头倾斜进而导致拍摄角度的变化量。
17.与现有技术相比,本发明的有益效果是:
18.1、采集管上连接摄像头,采集管所固定连接的截面球囊连接于截面球套内,使采集管能够相对于连接架一定范围内自由转动,在车辆发生倾斜或行驶于非平整路面上时,采集管在平衡机构作用下始终保持趋近于竖直状态,采集管所连接的摄像头处于相对水平状态,进入保证摄像真实性与稳定性,提高所采集信息的准确性;
19.2、采集管设置为可升高的结构,使摄像头高度可变,适用于在车载摄像头高度不能够满足地理环境的信息采集需求时,可调高摄像头高度以满足需求;
20.3、调高摄像头高度的方式为通过气筒向杆套内部供气,在气筒内压力升至一定强
度后,锁杆完全插入到锁孔内后,杆套与连接套连通,使连接套所连接的采集管内部充气从而使采集管升高;
21.4、采用至少三个连接杆连接于无人机上,且连接杆连接于截面球套底侧,使截面球套与无人机稳定连接,采用无人机采集图像时,采集管反向安装于无人机底部,保证摄像头侧面净空,避免影响拍摄。
附图说明
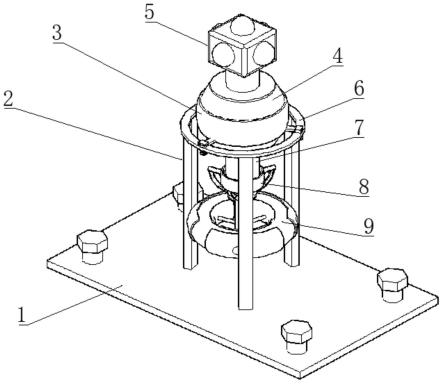
22.图1为本发明的结构示意图;
23.图2为本发明截面球套、截面球囊、采集管的连接图;
24.图3为本发明截面球套、截面球囊、采集管的剖视图;
25.图4为本发明采集管底端的局部结构示意图;
26.图5为本发明安装板、连接架、平衡机构的连接图;
27.图6为本发明支撑环的结构示意图;
28.图7为本发明平衡机构的结构示意图;
29.图8为本发明连接套的剖视图;
30.图9为本发明连接杆的结构示意图。
31.图中:1、安装板;2、连接架;21、压板;3、截面球套;31、卡扣;32、连接杆;321、挂扣;322、锁紧螺栓;4、截面球囊;41、限位环;5、采集装置;6、支撑环;61、限位杆;62、卡杆;7、采集管;71、插孔;72、滑管;721、滑块;722、滑槽;73、挡板;8、连接套;81、杆套;82、锁杆;83、拉力弹簧;84、锁紧气管;85、升降气管;9、平衡气囊;10、气筒;101、平衡杆。
具体实施方式
32.实施例1
33.如图1-3所示,一种地理信息二三维自动化采集系统,包括安装板1,安装板1上固定连接有连接架2,连接架2顶部通过支撑环6连接截面球套3,截面球套3内贴合转动连接有截面球囊4,截面球囊4外径与截面球套3内径相同,截面球囊4与采集管7固定连接,且截面球囊4的截面垂直的轴线与采集管7的轴线共线,采集管7顶部固定连接采集装置5,采集装置5包括摄像头,采集管7底端与平衡机构连接。
34.采集装置5固定于采集管7上,且采集管7所连接的截面球囊4与截面球套3能够相对转动,在采集装置5使用中,将安装板1固定于采集车上,使采集车处于水平状态时安装板1水平安装,在车辆行驶状态下,若车辆出现倾斜,由于采集管7底部连接平衡机构,且采集管7能够相对于连接架2转动,在平衡机构的作用下,即使采集车行驶过程中处于倾斜状态,采集管7能够保持趋近于竖直水平面的状态,因此能够使采集管7所连接的摄像头处于水平状态,保证所采集的图像信息准确性。
35.实施例2
36.如图1-6所示,一种地理信息二三维自动化采集系统,包括安装板1,安装板1上固定连接有连接架2,连接架2顶部通过支撑环6连接截面球套3,截面球套3内贴合转动连接有截面球囊4,截面球囊4外径与截面球套3内径相同,截面球囊4与采集管7固定连接,且截面球囊4的截面垂直的轴线与采集管7的轴线共线,采集管7顶部固定连接采集装置5,采集装
置5包括摄像头,采集管7底端与平衡机构连接;连接架2顶端固定连接支撑环6,支撑环6上设置限位杆61,限位杆61下方设置贯穿支撑环6并于支撑环6滑动连接的卡杆62,卡杆62与截面球囊4底侧固定连接的卡扣31卡接,使截面球套3能够固定在支撑环6上,采集管7设置为滑管72依次套接的方式,且滑管72外侧固定连接滑块721,滑块721于相邻套管内侧的滑槽722内滑动,使采集管7能够伸缩,进而升高采集装置5的高度,以便于适应特殊情况的下图像采集,如周围有树木或摄像头受到采集车车顶的遮蔽而无法采集靠近采集车位置的图像的问题。
37.在固定截面球套3时,截面球套3侧面固定的卡扣31放置于支撑环6上,支撑环6支撑卡扣31,之后旋转截面球套3使卡扣31位于限位环41内侧,松开卡杆62,卡杆62在弹簧作用下插入到卡扣31内,使截面球套3与支撑环6相对固定,即能够使截面球套3相对于安装板1固定,在需要升高采集装置5时,通过驱动滑管72上升使采集装置5上升,进而扩大摄像头的采集范围,在采集管7高度升至极限高度时仍无法满足摄像需求时,仍无法满足摄像高度时,可将截面球套3由支撑环6上拆卸下来,将截面球套3固定于无人机下方,采用无人机辅助采集信息的方式,由于截面球套3固定在无人机上,无人机在倾斜状态飞行时,采集管7仍能够相对于地平面竖直,从而避免采集装置5中的摄像头摄像角度发生改变而影响所采集信息的准确性,相较于现有技术中采集装置5固定在采集车上的方式,本采集系统适用范围更广。
38.实施例3
39.如图1-8所示,一种地理信息二三维自动化采集系统,包括安装板1,安装板1上固定连接有连接架2,连接架2顶部通过支撑环6连接截面球套3,截面球套3内贴合转动连接有截面球囊4,截面球囊4外径与截面球套3内径相同,截面球囊4与采集管7固定连接,且截面球囊4的截面垂直的轴线与采集管7的轴线共线,采集管7顶部固定连接采集装置5,采集装置5包括摄像头,采集管7底端与平衡机构连接;连接架2顶端固定连接支撑环6,支撑环6上设置限位杆61,限位杆61下方设置贯穿支撑环6并于支撑环6滑动连接的卡杆62,卡杆62与截面球囊4底侧固定连接的卡扣31卡接,使截面球套3能够固定在支撑环6上,采集管7设置为滑管72依次套接的方式,且滑管72外侧固定连接滑块721,滑块721于相邻套管内侧的滑槽722内滑动,使采集管7能够伸缩,进而升高采集装置5的高度,以便于适应特殊情况的下图像采集,如周围有树木或摄像头受到采集车车顶的遮蔽而无法采集靠近采集车位置的图像的问题,平衡机构包括固定于连接架2内侧的平衡气囊9,平衡气囊9内侧通过压板21与平衡杆101固定连接,平衡杆101另一端固定连接气筒10,气筒10顶端通过锁定气管与杆套81连通,杆套81内滑动连接锁杆82,锁杆82通过拉力弹簧83与杆套81固定连接,杆套81另一端与连接套8内部连通,杆套81中部通过升降气管85与连接套8底端中部连通。
40.在控制采集管7中的滑管72上升时,向气筒10内部充气,气体压力经锁紧气管84作用于杆套81内的锁杆82上,在压差作用下使锁杆82向连接套8内部滑动,锁杆82与采集管7底部的插孔71插接,使采集管7底部与连接套8贴合且相对固定,在锁杆82滑动至升降气管85内侧后,锁紧气管84与升降气管85连通,气筒10内的气体经升降气管85进入到采集器管内,采集管7内的压力上升使采集管7中的滑管72上升从而使采集装置5上升,通过向气筒10内加压可使锁杆82插入插孔71内保证采集管7与连接套8相对固定,且通过控制压力强度的方式控制采集管7内部升压实现采集装置5上升,滑管72侧面固定滑块721于相邻滑管72内
的滑槽722内滑动,使相邻的滑管72径向固定且限制相邻滑管72的极限滑动距离,本实施例中采集管7仅设置了两个滑管72套接,也可根据所需升降高度设置更多个滑管72套接。
41.实施例4
42.如图1-8所示,如图1-8所示,一种地理信息二三维自动化采集系统,包括安装板1,安装板1上固定连接有连接架2,连接架2顶部通过支撑环6连接截面球套3,截面球套3内贴合转动连接有截面球囊4,截面球囊4外径与截面球套3内径相同,截面球囊4与采集管7固定连接,且截面球囊4的截面垂直的轴线与采集管7的轴线共线,采集管7顶部固定连接采集装置5,采集装置5包括摄像头,采集管7底端与平衡机构连接;连接架2顶端固定连接支撑环6,支撑环6上设置限位杆61,限位杆61下方设置贯穿支撑环6并于支撑环6滑动连接的卡杆62,卡杆62与截面球囊4底侧固定连接的卡扣31卡接,使截面球套3能够固定在支撑环6上,采集管7设置为滑管72依次套接的方式,且滑管72外侧固定连接滑块721,滑块721于相邻套管内侧的滑槽722内滑动,使采集管7能够伸缩,进而升高采集装置5的高度,以便于适应特殊情况的下图像采集,如周围有树木或摄像头受到采集车车顶的遮蔽而无法采集靠近采集车位置的图像的问题,平衡机构包括固定于连接架2内侧的平衡气囊9,平衡气囊9内侧通过压板21与平衡杆101固定连接,平衡杆101另一端固定连接气筒10,气筒10顶端通过锁定气管与杆套81连通,杆套81内滑动连接锁杆82,锁杆82通过拉力弹簧83与杆套81固定连接,杆套81另一端与连接套8内部连通,杆套81中部通过升降气管85与连接套8底端中部连通,在采集管7底部的插孔71内侧设置挡板73,且锁杆82端部设置为球形,使锁杆82便于插入到插孔71内。
43.采集管7在锁杆82插入到插孔71内之后与连接套8贴合密封连接,为保证密封性,可在连接套8内侧设置密封垫,采集管7与连接套8连接后,使截面球套3下方采集管7所连接的重力远大于截面球套3上方采集管7所连接的重量,气筒10通过平衡杆101与压板21固定连接,压板21固定在平衡气囊9侧面,在采集车倾斜时,采集管7底部的重力较大,在重力作用下使采集管7连同截面球囊4相对于截面球套3转动,截面球囊4顶部的限位环41用于限制截面球囊4相对于截面球套3转动的极限角度,为防止由于采集车行驶状态下颠簸导致采集管7乱摆动,将气筒10与平衡气囊9通过平衡杆101连接,在采集管7连同气筒10摆动时,平衡气囊9对气筒10起到阻力作用,降低采集管7摆动的幅度,从而降低采集装置5摆动幅度,使摄像头即使在采集车行驶状态下仍能够在趋近水平状态下采集到较为稳定的图像,截面球套3底部固定连接杆32,在采用无人机代写采集装置5时,连接杆32设置有挂扣321的一端连接于无人机底侧,转动锁紧螺栓322使连接杆32端部与无人机抵触且相对固定,通过至少三根连接杆32将截面球套3与无人机连接,保证连接稳定性,在连接后,采集装置5位于截面球套3的下方,在重力作用下,滑管72下滑使截面球套3下方的采集管7长度远大于截面球套3上方的采集管7长度,使截面球套3底侧的力臂原大于上侧,从而使截面球套3下方受到的重力远大于上侧,在重力作用下,即使在无人机倾斜飞行状态下也能够使采集装置5处于相对水平的状态。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1