基于车辆后视镜ADAS识别的汽车倒车防碰撞系统的制作方法
基于车辆后视镜adas识别的汽车倒车防碰撞系统
技术领域
1.本发明涉及车辆安全技术领域,特别涉及一种基于车辆后视镜adas识别的汽车倒车防碰撞系统。
背景技术:
2.车辆在倒车过程中存在较大的盲区,容易出现交通事故。现有技术中通过在车辆后方安装倒车雷达,以监控车辆后方的目标物。但是倒车雷达对探测的车辆后方区域较小,对运动物体检测不准确,同时对车辆的侧方缺乏监控,在倒车时容易发生碰撞。
技术实现要素:
3.本发明旨在至少一定程度上解决上述技术中的技术问题之一。为此,本发明的目的在于提出一种基于车辆后视镜adas识别的汽车倒车防碰撞系统,对车辆的周围进行全面的监控,并且建立3d立体场景模型,便于用户可以全面且准确的确定周围的具体情况,在倒车过程中基于倒车轨迹进行准确预测,在确定将要发生碰撞时及时发出报警提示,保证车辆安全。
4.为达到上述目的,本发明实施例提出了一种基于车辆后视镜adas识别的汽车倒车防碰撞系统,包括:
5.获取模块,用于获取目标车辆后方及侧方的场景信息;
6.建立模块,用于根据所述场景信息建立3d立体场景模型;
7.填充模块,用于在所述3d立体场景模型中填充建立的目标车辆模型,并输入所述目标车辆的倒车轨迹;
8.报警模块,用于在确定所述倒车轨迹与3d立体场景模型中动态组成元素的移动轨迹存在交叉且目标车辆将发生碰撞的时间小于预设时间阈值时,发出报警提示。
9.根据本发明的一些实施例,所述获取模块,包括:
10.摄像模块,用于获取目标车辆周围的图像信号;
11.雷达模块,用于获取目标车辆周围的雷达信号。
12.根据本发明的一些实施例,所述建立模块,包括:
13.识别子模块,用于对所述图像信号进行解析,确定场景图像,将所述场景图像输入预先训练好的图像识别模型中,输出识别出的组合元素;
14.第一确定子模块,用于根据每个组合元素包括的像素点的数量及预设的像素点对应的实际长度信息,确定每个组合元素的尺寸信息;
15.第二确定子模块,用于对所述雷达信号进行解析,确定各个组合元素之间的距离;
16.建立子模块,用于设置三维立体坐标系,基于每个组合元素的尺寸信息及各个组合元素之间的距离建立3d立体场景模型。
17.根据本发明的一些实施例,所述填充模块,包括:
18.第三确定子模块,用于确定目标车辆在实际场景中的定位信息;
19.填充子模块,用于根据所述定位信息对所述目标车辆模型进行填充。
20.根据本发明的一些实施例,所述摄像头模块为双目摄像头。
21.根据本发明的一些实施例,所述雷达模块为毫米波雷达。
22.根据本发明的一些实施例,所述报警模块为声光报警器。
23.根据本发明的一些实施例,还包括:信号处理模块,用于:
24.在所述第二确定模块对所述雷达信号进行解析前,对所述雷达信号进行特征提取,得到特征信号及边缘信号;
25.对所述边缘信号进行低通滤波处理,得到滤波边缘信号;
26.基于resnet-34网络中的残差块结构,建立特征提取网络模型;
27.将所述特征信号输入特征提取网络模型中,输出第一特征矩阵,并获取第一特征矩阵的第一属性信息;
28.将所述滤波边缘信号输入特征提取网络模型中,输出第二特征矩阵,并获取第二特征矩阵的第二属性信息;
29.根据所述第一属性信息及所述第二属性信息进行矩阵拉平、变形操作,以及全连接层,将所述第一特征矩阵与所述第二特征矩阵进行融合,得到第三特征矩阵;
30.根据所述第三特征矩阵,得到降噪雷达信号。
31.根据本发明的一些实施例,还包括:
32.异常像素点识别模块,用于:
33.在所述识别子模块将所述场景图像输入预先训练好的图像识别模型前,将所述场景图像转换至hsv颜色空间,得到第一特征值,所述第一特征值包括h通道取值、s通道取值及v通道取值;
34.将所述场景图像转换至rgb颜色空间,得到第二特征值,所述第二特征值包括r通道取值、g通道取值及b通道取值;
35.将同一像素点对应的第一特征值及第二特征值分别与预设第一特征值及预设第二特征值进行比较,得到第一差异值及第二差异值;
36.在确定所述第一差异值小于预设第一差异值且所述第二差异值小于预设第二差异值时,表示像素点正常;反之,将像素点作为存疑像素点进行下一步检测;
37.将包括存疑像素点的场景图像,作为存疑图像,确定所述存疑图像对应的场景内容,并对所述场景内容进行多次拍摄,得到若干张对比图像;
38.确定对比图像中与所述存疑图像中存疑像素点对应位置的像素点,作为对比像素点;
39.根据所述对比像素点及所述存疑像素点进行动态监控,得到动态像素差异值,在确定所述动态差异值大于预设差异值时,表示所述存疑像素点为异常像素点;
40.修正模块,用于对所述异常像素点进行修正处理。
41.根据本发明的一些实施例,还包括:
42.驾驶员检测模块,用于获取目标车辆在倒车时驾驶员的驾驶图像,对所述驾驶图像进行识别,确定驾驶行为,并判断是否为异常驾驶行为;
43.所述报警模块,用于在所述驾驶员检测模块确定所述驾驶行为为异常驾驶行为时,发出报警提示。
44.本发明提出的基于车辆后视镜adas识别的汽车倒车防碰撞系统,实现对车辆的周围进行全面的监控,并且建立3d立体场景模型,便于用户可以全面且准确的确定周围的具体情况,在倒车过程中基于倒车轨迹进行准确预测,在确定将要发生碰撞时及时发出报警提示,保证车辆安全。
45.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书以及附图中所特别指出的结构来实现和获得。
46.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
47.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
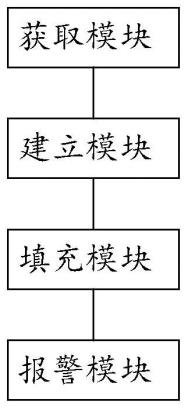
48.图1是根据本发明一个实施例的基于车辆后视镜adas识别的汽车倒车防碰撞系统的框图;
49.图2是根据本发明一个实施例的获取模块的框图;
50.图3是根据本发明一个实施例的建立模块的框图。
具体实施方式
51.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
52.如图1所示,本发明实施例提出了一种基于车辆后视镜adas识别的汽车倒车防碰撞系统,包括:
53.获取模块,用于获取目标车辆后方及侧方的场景信息;
54.建立模块,用于根据所述场景信息建立3d立体场景模型;
55.填充模块,用于在所述3d立体场景模型中填充建立的目标车辆模型,并输入所述目标车辆的倒车轨迹;
56.报警模块,用于在确定所述倒车轨迹与3d立体场景模型中动态组成元素的移动轨迹存在交叉且目标车辆将发生碰撞的时间小于预设时间阈值时,发出报警提示。
57.上述技术方案的工作原理:获取模块,用于获取目标车辆后方及侧方的场景信息;场景信息包括目标车辆后方及侧方及雷达信号及图像信号。建立模块,用于根据所述场景信息建立3d立体场景模型;填充模块,用于在所述3d立体场景模型中填充建立的目标车辆模型,并输入所述目标车辆的倒车轨迹;报警模块,用于在确定所述倒车轨迹与3d立体场景模型中动态组成元素的移动轨迹存在交叉且目标车辆将发生碰撞的时间小于预设时间阈值时,发出报警提示。
58.上述技术方案的有益效果:对车辆的周围进行全面的监控,并且建立3d立体场景模型,便于用户可以全面且准确的确定周围的具体情况,在倒车过程中基于倒车轨迹进行准确预测,在确定将要发生碰撞时及时发出报警提示,保证车辆安全。
59.如图2所示,根据本发明的一些实施例,所述获取模块,包括:
60.摄像模块,用于获取目标车辆周围的图像信号;
61.雷达模块,用于获取目标车辆周围的雷达信号。
62.上述技术方案的有益效果:基于摄像模块及雷达模块准确获取车辆后方及侧方的图像信号及雷达信号,提高环境感知的准确性。
63.如图3所示,根据本发明的一些实施例,所述建立模块,包括:
64.识别子模块,用于对所述图像信号进行解析,确定场景图像,将所述场景图像输入预先训练好的图像识别模型中,输出识别出的组合元素;
65.第一确定子模块,用于根据每个组合元素包括的像素点的数量及预设的像素点对应的实际长度信息,确定每个组合元素的尺寸信息;
66.第二确定子模块,用于对所述雷达信号进行解析,确定各个组合元素之间的距离;
67.建立子模块,用于设置三维立体坐标系,基于每个组合元素的尺寸信息及各个组合元素之间的距离建立3d立体场景模型。
68.上述技术方案的工作原理:识别子模块,用于对所述图像信号进行解析,确定场景图像,将所述场景图像输入预先训练好的图像识别模型中,输出识别出的组合元素;组合元素包括静态组合元素及动态组合元素。静态组合元素包括墙壁、石墩等。动态组合元素包括移动的车辆、行人等。第一确定子模块,用于根据每个组合元素包括的像素点的数量及预设的像素点对应的实际长度信息,确定每个组合元素的尺寸信息;第二确定子模块,用于对所述雷达信号进行解析,确定各个组合元素之间的距离;建立子模块,用于设置三维立体坐标系,基于每个组合元素的尺寸信息及各个组合元素之间的距离建立3d立体场景模型。
69.上述技术方案的有益效果:对图像信号进行准确识别,确定每个组合元素的尺寸信息。对雷达信号进行准确解析,确定各个组合元素之间的距离;准确获取建立3d立体场景模型的相关参数,提高了建立3d立体场景模型的准确性。
70.根据本发明的一些实施例,所述填充模块,包括:
71.第三确定子模块,用于确定目标车辆在实际场景中的定位信息;
72.填充子模块,用于根据所述定位信息对所述目标车辆模型进行填充。
73.上述技术方案的工作原理:所述填充模块,包括:第三确定子模块,用于确定目标车辆在实际场景中的定位信息;填充子模块,用于根据所述定位信息对所述目标车辆模型进行填充。
74.上述技术方案的有益效果:实现根据目标车辆模型及3d立体场景模型对目标车辆实际环境的仿真模拟,便于用户可以更加直观立体的感知。
75.根据本发明的一些实施例,所述摄像头模块为双目摄像头。
76.根据本发明的一些实施例,所述雷达模块为毫米波雷达。
77.根据本发明的一些实施例,所述报警模块为声光报警器。
78.根据本发明的一些实施例,还包括:信号处理模块,用于:
79.在所述第二确定模块对所述雷达信号进行解析前,对所述雷达信号进行特征提取,得到特征信号及边缘信号;
80.对所述边缘信号进行低通滤波处理,得到滤波边缘信号;
81.基于resnet-34网络中的残差块结构,建立特征提取网络模型;
82.将所述特征信号输入特征提取网络模型中,输出第一特征矩阵,并获取第一特征矩阵的第一属性信息;
83.将所述滤波边缘信号输入特征提取网络模型中,输出第二特征矩阵,并获取第二特征矩阵的第二属性信息;
84.根据所述第一属性信息及所述第二属性信息进行矩阵拉平、变形操作,以及全连接层,将所述第一特征矩阵与所述第二特征矩阵进行融合,得到第三特征矩阵;
85.根据所述第三特征矩阵,得到降噪雷达信号。
86.上述技术方案的工作原理:在所述第二确定模块对所述雷达信号进行解析前,对所述雷达信号进行特征提取,得到特征信号及边缘信号;对所述雷达信号进行特征提取,得到特征信号。将雷达信号中除特征信号外的信号作为边缘信号。边缘信号包括较多噪声信号。对所述边缘信号进行低通滤波处理,得到滤波边缘信号;基于resnet-34网络中的残差块结构,建立特征提取网络模型;将所述特征信号输入特征提取网络模型中,输出第一特征矩阵,并获取第一特征矩阵的第一属性信息;第一属性信息包括第一特征矩阵的大小、元素关联。将所述滤波边缘信号输入特征提取网络模型中,输出第二特征矩阵,并获取第二特征矩阵的第二属性信息;第二属性信息包括第二特征矩阵的大小、元素关联。根据所述第一属性信息及所述第二属性信息进行矩阵拉平、变形操作,以及全连接层,将所述第一特征矩阵与所述第二特征矩阵进行融合,得到第三特征矩阵;根据所述第三特征矩阵,得到降噪雷达信号。
87.上述技术方案的有益效果:准确确定边缘信号,并进行滤波处理,提高信噪比。构建以残差网络为主架构的特征提取网络,提高对信号的特征提取的效果,减少计算量及计算复杂度,准确输出对应的特征矩阵,基于特征矩阵的属性信息进行相应的处理,实现矩阵融合,根据融合矩阵,得到融合信号,即降噪雷达信号。提高信号重构的准确性,相对于现有技术中的信号重构,效率更加高效且更加简化。第二确定模块对降噪雷达信号进行解析,便于保证解析的准确性。
88.根据本发明的一些实施例,还包括:
89.异常像素点识别模块,用于:
90.在所述识别子模块将所述场景图像输入预先训练好的图像识别模型前,将所述场景图像转换至hsv颜色空间,得到第一特征值,所述第一特征值包括h通道取值、s通道取值及v通道取值;
91.将所述场景图像转换至rgb颜色空间,得到第二特征值,所述第二特征值包括r通道取值、g通道取值及b通道取值;
92.将同一像素点对应的第一特征值及第二特征值分别与预设第一特征值及预设第二特征值进行比较,得到第一差异值及第二差异值;
93.在确定所述第一差异值小于预设第一差异值且所述第二差异值小于预设第二差异值时,表示像素点正常;反之,将像素点作为存疑像素点进行下一步检测;
94.将包括存疑像素点的场景图像,作为存疑图像,确定所述存疑图像对应的场景内容,并对所述场景内容进行多次拍摄,得到若干张对比图像;
95.确定对比图像中与所述存疑图像中存疑像素点对应位置的像素点,作为对比像素点;
96.根据所述对比像素点及所述存疑像素点进行动态监控,得到动态像素差异值,在确定所述动态差异值大于预设差异值时,表示所述存疑像素点为异常像素点;
97.修正模块,用于对所述异常像素点进行修正处理。
98.上述技术方案的工作原理:异常像素点识别模块,用于:在所述识别子模块将所述场景图像输入预先训练好的图像识别模型前,将所述场景图像转换至hsv颜色空间,得到第一特征值,所述第一特征值包括h通道取值、s通道取值及v通道取值;将所述场景图像转换至rgb颜色空间,得到第二特征值,所述第二特征值包括r通道取值、g通道取值及b通道取值;将同一像素点对应的第一特征值及第二特征值分别与预设第一特征值及预设第二特征值进行比较,得到第一差异值及第二差异值;在确定所述第一差异值小于预设第一差异值且所述第二差异值小于预设第二差异值时,表示像素点正常;反之,将像素点作为存疑像素点进行下一步检测;将包括存疑像素点的场景图像,作为存疑图像,确定所述存疑图像对应的场景内容,并对所述场景内容进行多次拍摄,得到若干张对比图像;确定对比图像中与所述存疑图像中存疑像素点对应位置的像素点,作为对比像素点;根据所述对比像素点及所述存疑像素点进行动态监控,得到动态像素差异值,在确定所述动态差异值大于预设差异值时,表示所述存疑像素点为异常像素点;修正模块,用于对所述异常像素点进行修正处理。动态像素差异值为根据对比像素点的像素值与所述存疑像素点的像素值的差值,计算出的平均差值。
99.上述技术方案的有益效果:基于将场景图像转换至hsv颜色空间及rgb颜色空间,便于在色度方向,对像素点进行初筛,确定存疑像素点。对存疑像素点进行动态监控,实现第二次筛选,准确判断是否为异常像素点,在确定为异常像素点时,进行修正处理,保证输入图像识别模型的场景图像的准确性。
100.根据本发明的一些实施例,还包括:
101.驾驶员检测模块,用于获取目标车辆在倒车时驾驶员的驾驶图像,对所述驾驶图像进行识别,确定驾驶行为,并判断是否为异常驾驶行为;
102.所述报警模块,用于在所述驾驶员检测模块确定所述驾驶行为为异常驾驶行为时,发出报警提示。
103.上述技术方案的工作原理:驶员检测模块,用于获取目标车辆在倒车时驾驶员的驾驶图像,对所述驾驶图像进行识别,确定驾驶行为,并判断是否为异常驾驶行为;所述报警模块,用于在所述驾驶员检测模块确定所述驾驶行为为异常驾驶行为时,发出报警提示。
104.上述技术方案的有益效果:便于在驾驶员在倒车过程中规范驾驶行为,避免发生碰撞。
105.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1