智能驾驶混合动力拖拉机控制系统
1.本发明涉及智能驾驶拖拉机控制领域,具体涉及一种智能驾驶混合动力拖拉机控制系统。
背景技术:
2.我国是一个农业大国,拖拉机作为农业生产的主要动力机械,其保有量逐年增加,但传统燃油拖拉机能源消耗和污染物的排放问题已经成为了节能减排工作的重点和难点。随着智能驾驶混合动力汽车技术的发展、成熟,混合动力电动拖拉机也逐步进入农业机械领域。对节能环保、稳定高效的智能驾驶混合动力拖拉机进行研究,对于促进我国农用电动车辆的研究与开发、缓解能源危机和环境污染、减少用户工作强度有着非常重大的意义。
3.混合动力拖拉机能量管理策略是影响混合动力系统性能优劣的关键,合理有效的运动规划能量管理策略可以提高整车的燃油经济性。基于规则的逻辑门限控制策略通过设置速度、电池荷电状态(soc)和发动机工作转矩等参数,根据设置好的规则,判断动力系统的工作模式,使汽车尽可能运行在高效率区,该控制策略简单易行,但由于是静态的,不能完全适应动态的变化;瞬时优化控制策略是在每一时刻确定电机的工作范围和发动机的工作点,计算发动机的实际燃油消耗和电机的等效燃油消耗,使当前工作点为名义油耗最小的点,该控制策略能确保每一时刻的燃油经济性最优,但仍有进一步节能的空间;智能控制策略是将一些智能算法用于动力系统控制的一类控制策略,主要有模糊逻辑、神经网络等,该控制策略鲁棒性好,但只能根据经验和相关数据建立。为此,开发高效、适应性强、具有工程应用价值的控制算法至关重要。
技术实现要素:
4.本发明的目的是提供一种智能驾驶混合动力拖拉机控制系统,基于线性mpc运动规划系统和能量管理系统的线性mpc分层控制系统,线性mpc系统为分层控制系统,上层为运动规划系统,下层为能量管理系统,二者均是基于线性mpc的控制系统,以保证系统的求解效率和更好的解决系统稳定性问题。
5.本发明采用的智能驾驶混合动力拖拉机拓扑结构包括动力传动系统和智能驾驶感知系统,其中动力传动系统包括动力电池、ac/dc模块、dc/dc模块、柴油机、转矩耦合器、转向助力泵、牵引电动机、pto电动机(pto代表动力输出轴)、变速器、离合器、中央传动、整车控制器等部件;智能驾驶感知系统包括低压蓄电池、工控机、速度传感器、陀螺仪、激光雷达和双目摄像头等部件。动力电池通过dc/dc模块给低压蓄电池充电,通过ac/dc模块实现牵引电动机、pto电动机之间的能量交换;整车控制器通过can总线分别与动力电池、低压蓄电池、陀螺仪、速度传感器、柴油机、离合器、转向助力泵、牵引电动机、pto电动机、变速器、ac/dc、dc/dc连接,并通过udp通讯从工控机获取拖拉机的工况信息,进行优化控制,实现拖拉机节能运行。
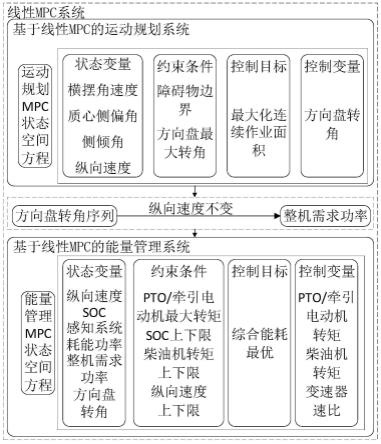
6.本发明的线性mpc系统为分层控制系统,如图1所示。上层为运动规划系统,下层为
能量管理系统,二者均是基于线性mpc的控制系统。运动规划系统mpc状态空间方程包括状态变量:横摆角速度、质心侧偏角、侧倾角、纵向速度;约束条件:障碍物边界、方向盘最大转角;控制目标:最大化连续作业面积;控制变量:方向盘转角。能量管理系统mpc状态空间方程包括状态变量:纵向速度、荷电状态(soc)、感知系统耗能功率、整机需求功率、方向盘转角;约束条件:pto/牵引电动机最大转矩、soc上下限、柴油机转矩上下限、纵向速度上下限;控制目标:综合能耗最优;控制变量:柴油机转矩、pto/牵引电动机转矩、变速器速比。
7.实际上运动规划系统和能量管理系统均是非线性系统,由于非线性mpc在求解效率和系统稳定性保证方面存在诸多难题,且mpc对模型的精度要求不高,故将二者通过泰勒公式线性化,以保证系统的求解效率和更好的解决系统稳定性问题。
8.基于线性mpc的运动规划系统,运动规划系统基本原理框图如图3所示。包括预测模型、参考量和滚动优化模块等。预测模型为运动规划mpc系统状态方程,状态变量为横摆角速度、质心侧偏角、侧倾角、纵向速度,预测模型预测拖拉机的状态与参考量(最优轨迹)作差,在滚动优化模块进行优化。滚动优化模块以障碍物边界、方向盘最大转角为约束条件,最大化连续作业面积为控制目标,方向盘转角为控制变量实现优化。控制变量(即方向盘转角)作用于耦合动力学模型,得到下一时刻状态变量,下一时刻状态变量给到预测模型。如此,通过mpc滚动时域优化揭示连续作业避障条件下方向盘转角最优分配规律。需要特别说明的是方向盘转角得到的是控制时域内的方向盘转角序列,再结合纵向速度不变的条件,得到整机需求功率序列,为基于线性mpc的能量管理系统提供数据支撑。
9.基于线性mpc的能量管理系统,能量管理系统基本原理框图如图4所示。包括预测模型、参考量和滚动优化模块等。预测模型为能量管理系统状态方程,状态变量为纵向速度、荷电状态(soc)、感知系统耗能功率、整机需求功率、方向盘转角,预测模型预测拖拉机的状态与参考量(最佳能耗)作差,在滚动优化模块进行优化。滚动优化模块以pto/牵引电动机最大转矩、soc上下限、柴油机转矩上下限、纵向速度上下限(变化极小)为约束条件,综合能耗最优为控制目标,pto/牵引电动机转矩、柴油机转矩、变速器速比为控制变量进行优化。控制变量(即pto/牵引电动机转矩、柴油机转矩、变速器速比)作用于耦合动力学模型,得到下一时刻状态变量:纵向速度、soc、感知系统耗能功率、整机需求功率、方向盘转角,其中整机需求功率、方向盘转角两个状态变量从运动规划系统获取。如此,通过mpc滚动时域优化揭示融合感知系统能量流的柴油机转矩、pto/牵引电动机转矩、变速器速比的最优分配规律。
10.本发明的有益效果为:
11.(1)模型预测运动规划和能量管理系统以不同预测模型为基础,采用滚动优化,具有鲁棒性强、控制效果良好、稳定性高的优点,可减少作业环境扰动对优化性能的影响,提升控制系统的适应性和整机经济性。
12.(2)线性mpc系统为分层控制系统,上层为运动规划系统,下层为能量管理系统,二者均是基于线性mpc的控制系统,以保证系统的求解效率和更好的解决系统稳定性问题。
附图说明
13.图1为本发明的线性mpc系统分层控制框图。
14.图2为本发明的智能驾驶混合动力拖拉机拓扑结构图。
15.图3为本发明的运动规划系统基本原理框图。
16.图4为本发明的能量管理系统基本原理框图。
17.图3、图4中的耦合动力学模型:基于理论分析建立包括动力传动系统和智能驾驶感知系统能量流的耦合动力学模型。动力传动系统包括动力电池、ac/dc模块、dc/dc模块、柴油机、牵引电动机、转向助力泵、转矩耦合器、离合器、pto电动机(pto代表动力输出轴)、变速器、中央传动、整车控制器等部件,建立考虑pto/牵引电动机转速/转矩特性、动力电池端电压特性等的电驱动系统模型;智能驾驶感知系统包括低压蓄电池、工控机、陀螺仪、速度传感器、激光雷达、双目摄像头等部件,根据能量流动机理,建立考虑温度等因素影响的感知系统能量流模型。结合车辆系统动力学,考虑感知系统能量流,建立包含动力传动系统的拖拉机整机的耦合动力学模型。
具体实施方式
18.下面给出具体实施例,对本发明的技术方案作进一步清楚、完整、详细地说明。本实施例是以本发明技术方案为前提的最佳实施例,但本发明的保护范围不限于下述的实施例。
19.本实施例以应用图1所示的控制系统的某款智能驾驶混合动力拖拉机为例,进行详细说明。该款智能驾驶混合动力拖拉机的拓扑结构如图2所示。智能驾驶混合动力拖拉机的拓扑结构包括动力传动系统和智能驾驶感知系统,其中动力传动系统包括动力电池、ac/dc模块、dc/dc模块、柴油机、转矩耦合器、牵引电动机、转向助力泵、pto电动机(pto代表动力输出轴)、变速器、离合器、中央传动、整车控制器等部件;智能驾驶感知系统包括低压蓄电池、工控机、速度传感器、陀螺仪、激光雷达和双目摄像头等部件。动力电池通过dc/dc模块与低压蓄电池电连接,用于给低压蓄电池充电;动力电池通过ac/dc模块与牵引电动机、pto电动机电连接,用于实现牵引电动机、pto电动机之间的能量交换;低压蓄电池分别与激光雷达、双目摄像头、速度传感器、陀螺仪、整车控制器、工控机电连接,以给前述各部件提供电能;整车控制器与动力电池、低压蓄电池、陀螺仪、速度传感器、柴油机、离合器、转向助力泵、牵引电动机、pto电动机、变速器、ac/dc模块、dc/dc模块分别通过can总线连接,整车控制器还通过udp通讯从工控机获取拖拉机的工况信息,进行优化控制,实现拖拉机节能运行。
20.本发明的一种智能驾驶混合动力拖拉机控制系统,采用线性mpc分层控制系统,如图1所示。上层为运动规划系统,下层为能量管理系统,二者均是基于线性mpc的控制系统。实际上运动规划系统和能量管理系统均是非线性系统,由于非线性mpc在求解效率和系统稳定性保证方面存在诸多难题,且mpc对模型的精度要求不高,故将二者通过泰勒公式线性化,以保证系统的求解效率和更好的解决系统稳定性问题。上层为基于线性mpc的运动规划系统,其运动规划mpc状态空间方程包括状态变量:横摆角速度、质心侧偏角、侧倾角、纵向速度;约束条件:障碍物边界、方向盘最大转角;控制目标:最大化连续作业面积;控制变量:方向盘转角。下层为基于线性mpc的能量管理系统,其能量管理mpc状态空间方程包括状态变量:纵向速度、荷电状态(soc)、感知系统耗能功率、整机需求功率、方向盘转角;约束条件:pto/牵引电动机最大转矩、soc上下限、柴油机转矩上下限、纵向速度上下限;控制目标:综合能耗最优;控制变量:柴油机转矩、pto/牵引电动机转矩、变速器速比。
21.下面以该款智能驾驶混合动力拖拉机在田间作业为例,进行详细地控制说明。基于理论分析建立包括动力传动系统和智能驾驶感知系统能量流的耦合动力学模型。动力传动系统包括柴油机、牵引电动机、动力电池、ac/dc模块、dc/dc模块、转矩耦合器、转向助力泵、pto电动机(pto代表动力输出轴)、变速器、离合器、中央传动、整车控制器等部件,建立考虑pto/牵引电动机转速/转矩特性、动力电池端电压特性等的电驱动系统模型;智能驾驶感知系统包括低压蓄电池、工控机、陀螺仪、速度传感器、激光雷达、双目摄像头等部件,根据能量流动机理,建立考虑温度等因素影响的感知系统能量流模型。结合车辆系统动力学,考虑感知系统能量流,建立包含动力传动系统的拖拉机整机的耦合动力学模型。
22.基于线性mpc的运动规划系统,运动规划系统的基本原理框图如图3所示。包括预测模型、参考量和滚动优化模块等。参考量为混合动力拖拉机行进的最优轨迹。预测模型为运动规划mpc状态空间方程,状态变量为横摆角速度、质心侧偏角、侧倾角、纵向速度,预测模型预测拖拉机的状态与参考量作差,在滚动优化模块进行优化。滚动优化模块以障碍物边界、方向盘最大转角为约束条件,最大化连续作业面积为控制目标,方向盘转角为控制变量实现优化。控制变量作用于耦合动力学模型,得到下一时刻状态变量,下一时刻状态变量给到预测模型。所述运动规划系统基于滚动时域预测方向盘转角,在满足约束条件的同时,通过优化算法滚动优化目标函数,获取预测时域内的最优控制序列,将该序列的第一时刻应用于预测模型更新整机状态,下一时刻再次获取状态变量(横摆角速度、质心侧偏角、侧倾角、纵向速度),重新预测有限时域内整机运行状态,不断修正上一时刻的预测值,运用更新的预测值优化方向盘转角最优分配规律。如此,通过mpc滚动时域优化揭示连续作业避障条件下方向盘转角最优分配规律。
23.需要特别说明:智能驾驶拖拉机在田间作业,行驶速度较低,直线行驶时遇到障碍物或转向时,以保持拖拉机纵向速度不变为条件,求解此条件下的能量管理最优分配策略。也就是获取方向盘转角在控制时域内的控制序列,再结合纵向速度不变的条件,得到整机需求功率序列,为能量管理系统提供数据支撑。
24.基于线性mpc的能量管理系统,能量管理系统的基本原理框图如图4所示。包括预测模型、参考量和滚动优化模块等。参考量为混合动力拖拉机行进的最佳能耗。预测模型为能量管理mpc状态空间方程,状态变量为纵向速度、荷电状态(soc)、感知系统耗能功率、整机需求功率、方向盘转角,预测模型预测拖拉机的状态与参考量(最佳能耗)作差,在滚动优化模块进行优化。滚动优化模块以pto/牵引电动机最大转矩、soc上下限、柴油机转矩上下限、纵向速度上下限(变化极小)为约束条件,综合能耗最优为控制目标,pto/牵引电动机转矩、柴油机转矩、变速器速比为控制变量进行优化。能量管理控制系统在每个预测时域内需要满足如下物理约束:
[0025][0026]
式中:参数下标max和min分别为对应物理量的最大值和最小值。td为牵引电动机最大转矩、to为pto最大转矩、soc为荷电状态、tc柴油机转矩、vy为纵向速度。
[0027]
控制变量作用于耦合动力学模型,得到下一时刻状态变量:纵向速度、soc、感知系统耗能功率、整机需求功率、方向盘转角,其中整机需求功率、方向盘转角两个状态变量从基于现行mpc的运动规划系统获取。基于滚动时域预测需求功率,在满足部件约束条件的同时,通过优化算法滚动优化目标函数,获取预测时域内的最优控制序列,将该序列的第一时刻应用于预测模型更新整机状态,下一时刻再次获取状态变量(纵向速度、荷电状态(soc)、感知系统耗能功率、整机需求功率、方向盘转角),重新预测有限时域内整机运行状态,不断修正上一时刻的预测值,运用更新的预测值优化动力系统功率分配。如此,通过mpc滚动时域优化揭示融合感知系统能量流的柴油机转矩、pto/牵引电动机转矩、变速器速比的最优分配规律。
[0028]
通过线性mpc系统分层控制策略,对智能驾驶拖拉机的田间作业进行运动规划系统和能量管理系统的同时控制优化,能够更好地满足拖拉机连续作业面积大和综合能耗低的需求。
[0029]
以上显示和描述了本发明的主要特征、基本原理以及本发明的优点。本行业技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会根据实际情况有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1