一种面向高度自动驾驶的人机混合决策方法
1.本发明涉及一种驾驶机器人应用领域,特别涉及一种面向高度自动驾驶的人机混合决策方法。
背景技术:
2.自动驾驶车辆行为决策是实现无人驾驶的核心技术之一,通过对驾驶环境的综合感知信息做出安全、高效的驾驶行为决策对自动驾驶技术的应用和发展非常重要。随着传感器技术的发展,自动驾驶车辆系统能够感知驾驶员无法获得的周围环境信息,由于自动驾驶车辆决策系统面对真实路况的复杂性和不确定性,应对一些危险工况甚至涉及道德伦理决策时还存在较大的问题,这也是制约自动驾驶车辆普及的因素。自动驾驶车辆行为决策模型随着能够应对驾驶场景复杂度的难易程度从基于规则的决策模型过渡到基于效用的决策模型。然而基于效用的决策模型存在可解释性差的问题。缺乏可解释性的决策模型有可能会给驾驶任务带来安全隐患,降低自动驾驶车辆乘员对车辆系统的信任度。
3.驾驶员驾驶过程中做出的行为决策易受生理、心理因素的影响,但是驾驶员利用视觉、听觉对周围环境的理解和响应具有自动驾驶车辆系统目前无法比拟的优势。因此,在执行驾驶任务时如何充分发挥驾驶员和自动驾驶车辆系统各自的长处使得人机共驾车辆做出更为安全、高效的行为决策是目前亟需解决的问题。开展面向l3级智能化的人机协同共驾研究,具有重要的理论意义和产业化价值。
4.随着互联网的普及和人工智能的发展。其中人机混合智能在智能外骨骼设备、人机混合决策智能飞行系统以及智能机器人等不同领域中的应用取得突破性进展。然而,人机混合智能在智能车辆行为决策中的应用与研究较少。人机共驾车辆行为决策作为l3级智能体关键技术之一,研究面向高度自动驾驶的人机混合决策方法对自动驾驶技术的发展具有重要意义。
技术实现要素:
5.本发明的目的是通过人机协作的方式,提高人与系统综合的性能,使得人类智能和人工智能的结合成为最高效的解决复杂任务问题而提供的一种面向高度自动驾驶的人机混合决策方法。
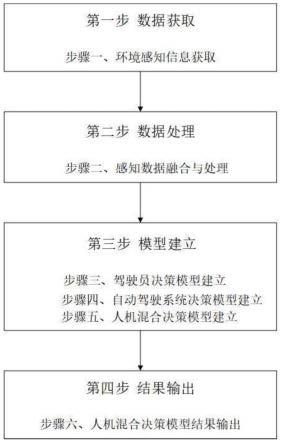
6.本发明提供的面向高度自动驾驶的人机混合决策方法,其方法包括的步骤如下所述:
7.步骤一、自动驾驶系统获取环境感知信息,具体如下所述:
8.人机共驾车辆自动驾驶系统利用传感器对周围环境以及本车的感知,给自动驾驶车辆行为决策提供依据,为了准确、高效的感知周围环境,人机共驾车辆配有丰富的传感器装置,主要包括激光雷达,毫米波雷达,超声波雷达,相机,惯性测量单元以及定位系统,其中激光雷达用于对较远距离的目标物扫描,获得探测范围内被探测物的三维特征,获得车辆、行人、周围建筑以及障碍物的轮廓和距离,恶劣天气环境下,毫米波雷达具有激光雷达
无法比拟的优势,毫米波雷达穿透雾、烟、灰尘的能力强,具有大雨天除外的全天候及全天时的特点,安装短距、中距和长距的毫米波雷达探测人机共驾车辆与被测物体的相对距离,相对速度,用相机采集交通信号灯、交通标识信息,超声波雷达实现车辆5米内障碍物探测,以此达到对车辆周围环境全面感知,惯性测量单元保证自动驾驶车辆定位精度和操作安全,采用环境感知数据输入到自动驾驶系统,自动驾驶系统根据环境感知信息作出合理的驾驶行为;
9.步骤二、人机共驾车辆自动驾驶系统对感知数据的融合与处理,具体如下所述:
10.人机共驾车辆自动驾驶系统需要对传感器获得的数据进行融合处理,传感器感知的信息通过中央处理器和图形处理器进行处理,剔除无用信息,获得单一传感器无法感知的全方面信息,包括人机共驾车辆的位置、速度和加速度信息,还包括各种天气条件下,即雨天、雾天、雪天以及光线较强或较弱场景下的道路环境信息,包括人机共驾车辆周围所有类型的车辆和行人的动态交通参与者的运动状态信息、交通信号灯信息和交通标识牌、道路曲率与结构、障碍物、车道线的静态环境信息,为人机共驾车辆自动驾驶系统进行行为决策提供可靠的多环境信息维数信息,对周围环境有更充分、更准确的感知,保障自动驾驶行为决策的信息来源的全面性和可靠性,提高人机共驾车辆的行车安全性;
11.步骤三、驾驶员决策模型建立,具体如下所述:
12.驾驶员根据视觉信息、听觉信息和触觉信息对当前驾驶环境进行综合态势感知,驾驶员根据驾驶经验分为一般驾驶场景和紧急驾驶场景,根据驾驶习惯做出相应的驾驶行为决策,主要包括换道、超车、跟车、左右转以及停车,具体体现为相应的驾驶动作,对方向盘、油门踏板以及制动踏板的操纵,人机共驾车辆驾驶环境做出的驾驶行为决策对应的方向盘、油门踏板以及制动踏板的控制量作为人机共驾车辆自动驾驶系统决策模型的输入,为自动驾驶系统行为决策提供依据;
13.步骤四、自动驾驶系统决策模型建立,具体如下所述:
14.自动驾驶系统决策模型通过步骤二中处理后的人机共驾车辆感知驾驶环境的数据,包括人机共驾车辆周围所有类型的车辆和行人的动态交通参与者的运动状态信息、交通信号灯信息和交通标识牌、道路曲率与结构、障碍物以及车道线的静态环境信息,自动驾驶系统根据人机共驾车辆对本车和周围环境的感知数据以及驾驶员对人机共驾车辆做出的驾驶行为决策对应的方向盘、油门踏板以及制动踏板的控制量作为自动驾驶系统决策模型的输入,通过已建立的语义库,采用贝叶斯推理获得自动驾驶系统行为决策结果,语义库的来源主要包括对数据库中的自动驾驶数据集进行机器学习以及专家经验知识表达形成;
15.步骤五、人机混合决策模型建立,具体如下所述:
16.驾驶员决策模型和与自动驾驶系统决策模型一致性对比,驾驶员决策模型和自动驾驶系统决策模型输出的决策结果一致时,则表明驾驶员和机器决策的高度一致性,同时输入到人机混合决策模型中,人机混合决策模型根据二者的决策结果,通过人机一致性对比模型直接输出或者通过机器学习输出最终的驾驶决策行为结果;
17.步骤六、人机混合决策结果输出,具体如下所述:
18.驾驶员决策模型和自动驾驶系统决策模型同时输入到人机混合决策模型中,人机混合决策模型根据二者的决策结果,通过人机一致性对比模型直接输出或者通过机器学习得到驾驶员决策和自动驾驶系统决策分配权系数,最后输出人机混合决策系统的驾驶决策
行为结果;
19.步骤七、人机混合决策模型结果输出,具体如下所述:
20.人机混合决策模型对当前驾驶环境驾驶员决策行为和自动驾驶系统决策行为结果进行对比,如果二者决策结果一致,人机混合决策模型输出当前决策行为结果,如果决策结果不一致,对驾驶员决策行为结果和自动驾驶决策行为结果进行决策权分配,对输出的人机混合决策模型最终的决策结果进行评价,通过机器学习获得最优的决策权分配系数,形成新的语义库,对新的语义库进行推理,最终驾驶员决策行为和自动驾驶系统决策行为结果一致时输出人机混合决策模型的决策行为结果。
21.步骤四中自动驾驶系统决策模型建立的具体步骤如下:
22.(a)、数据库建立:
23.自动驾驶数据集包括高速路环境、城市道路环境、国省道路环境和隧道道路环境的道路环境的数据集,数据集的来源有通过前述步骤一中装有各种传感器的实车采集的数据集,各种机构、企业、单位权威的自动驾驶数据集,已发生的交通事故采集到的数据集和通过搭建虚拟仿真平台得到的一些实车无法采集的危险驾驶场景的数据集,通过数据清理、数据集成、数据规约以及数据变换的方法对自动驾驶数据集进行数据预处理,删除不符合车辆动力学模型规律的数据,填补一些由于硬件设备因素限制的缺失数据,对于一些噪声数据进行光滑的操作,对高速路环境、城市道路环境、国省道路环境和隧道道路环境的道路环境的数据集进行分类,经过数据预处理后得到规范合理的车道行驶数据和交叉路口数据,对每类道路环境的数据集进行数据分析,根据数据集预期目标分为训练集和测试集,研究高速路道路环境的车辆换道行为,提取所有换道车辆和有限的周围驾驶环境的样本信息,即同车道和相邻车道的车辆的位置、速度、加速度信息和车道线信息,以及对应的样本标签,建立好的可扩展、可维护、性能号和可靠性高的规范数据库为自动驾驶系统通过机器学习获得行为决策规律提供依据;
24.(b)、语义库建立,通过机器学习建立语义库,具体如下:
25.以决策树算法为基础,对上述(a)中建立的数据库,包括高速路环境、城市道路环境、国省道路环境和隧道道路环境的道路环境的训练集进行训练,以获取人机共驾车辆驾驶决策行为分类模型,结合自然语言处理的语言模型,对上述数据库中所有道路环境的人机共驾车辆驾驶决策行为分类模型特征提取与表示,根据车道行驶数据得到的决策行为分为换道、超车和跟车,根据交叉路口分为直行和左右转,通过决策树算法对驾驶行为进行分类、统计,形成可读性强的语义库,语义库存放用自然语言描述不同驾驶场景、驾驶工况语义信息;
26.通过专家经验,语言表达建立语义库:
27.其中驾驶经验用来指导自动驾驶车辆在不同驾驶场景下的行为决策,根据专家经验实现对驾驶场景的高效推理,提高车辆行为决策系统的决策效率,把驾驶经验用自然语言表示出来形成驾驶经验语义库;
28.(c)、决策树模型的构造,具体如下:
29.根据数据库中车道行驶数据和交叉路口行驶数据人机共驾车辆有换道、超车、跟车、左右转和直行的决策行为,通过决策树算法将不同道路环境对车辆的决策行为进行分类,形成各种道路环境换道、跟车、超车、左右转、直行和停车的决策行为语义库,针对一个
驾驶场景中的车辆换道数据进行决策树建模,然后按照同样方式分别应用到其他跟车、左转、右转、直行和停车的决策行为数据中,以换道为例,输入换道数据,确定影响换道决策行为的因素作为决策树特征选择的依据,包括本车道和相邻车道前后障碍物的相对位置、速度、加速度信息,对换道数据集样本中特征参数进行特征参数区间化预处理,找到各类特征参数合适的分裂点,使整体的区间分段化计算不同特征进行分类选择后的分类情况,通过使用最高增益率的属性作为整个集合的测试属性,依次找到最好的根节点,数据集不可分则完成决策树生成,完成当前特征参数的决策树的建立之后,由该特征的不同取值建立分枝,剪枝,完成决策树的构造;
30.(d)、贝叶斯推理,具体如下:
31.人机共驾车辆感知数据希望得到更好匹配这组数据的贝叶斯模型,贝叶斯推理是解决问题的关键,上述(c)中建立的决策树模型对节点进行了标记,为使模型具有概率背景,将贝叶斯推理融入决策树模型,对上述(b)中语义库表达的语义信息进行推理,首先对不同驾驶决策行为的决策树结构进行分析,确定决策树节点信息,再结合贝叶斯模型求出参数变量先验分布和参数产生数据的似然分布,贝叶斯推理采用马尔可夫链蒙特卡罗方法,通过模拟一个合适的马尔可夫链从后验分布中采样,经过贝叶斯推理得到后验分布,通过贝叶斯推理,输出自动驾驶系统行为决策结果。
32.本发明的有益效果:
33.本发明提供了一种提供的面向高度自动驾驶的人机混合决策方法。本发明涉及的驾驶环境包括乡村道路环境,城市道路环境,高速路环境等。根据已建好的语义库,自动驾驶系统通过贝叶斯推理对人机共驾车辆所处的驾驶环境做出行为决策。人机混合决策系统对驾驶员对车辆所处驾驶环境做出的决策和自动驾驶系统的决策进行一致性对比,通过机器学习输出决策结果,增强决策结果的安全性和可靠性。本发明结合了人工智能学科的技术解决面向高度自动驾驶的人机混合行为决策问题,并且能够结合多学科的先进技术手段,构建了基于人机混合决策方法的框架,把人机混合智能应用于人机共驾车辆决策系统中,使得决策更精准,效率更高,为自动驾驶车辆行为决策提供方法和依据。本发明符合人机共驾技术的发展趋势,具有广泛的应用前景和可行性。
附图说明
34.图1为本发明所述的人机混合决策方法的整体步骤示意图。
35.图2为本发明所述的人机共驾系统技术路线示意图。
36.图3为本发明所述的人机混合决策方法框架示意图。
37.图4为本发明所述的人机共驾系统环境感知示意图。
38.图5为本发明所述的驾驶员决策模型示意图。
39.图6为本发明所述的数据库处理示意图。
40.图7为本发明所述的自动驾驶系统语义库示意图。
41.图8为本发明所述的决策树算法框架示意图。
42.图9为本发明所述的自动驾驶系统贝叶斯推理模型示意图。
43.图10为本发明所述的人机共驾系统决策权分配示意图。
具体实施方式
44.请参阅图1至图10所示:
45.本发明提供的面向高度自动驾驶的人机混合决策方法,其方法如下所述:
46.步骤一、自动驾驶系统获取环境感知信息;
47.步骤二、人机共驾车辆自动驾驶系统对感知数据的融合与处理;
48.步骤三、驾驶员决策模型建立;
49.步骤四、自动驾驶系统决策模型建立;
50.步骤五、人机混合决策模型建立;
51.步骤六、人机混合决策结果输出;
52.步骤一中,环境感知是自动驾驶核心技术之一。人机共驾车辆自动驾驶系统利用传感器对周围环境以及本车的感知,给自动驾驶车辆行为决策提供依据。为了准确,高效的感知周围环境,人机共驾车辆配有丰富的传感器装置,主要包括激光雷达,毫米波雷达,超声波雷达,相机,惯性测量单元,定位系统等。其中激光雷达用于对较远距离的目标物扫描,获得探测范围内被探测物的三维特征,获得车辆,行人,周围建筑以及障碍物的轮廓和距离。恶劣天气环境下,毫米波雷达具有激光雷达无法比拟的优势。毫米波雷达穿透雾、烟、灰尘的能力强,具有全天候(大雨天除外)全天时的特点。安装短距,中距,长距的毫米波雷达探测人机共驾车辆与被测物体的相对距离,相对速度。用相机采集交通信号灯、交通标识信息,超声波雷达实现车辆5米内障碍物探测,以此达到对车辆周围环境全面感知。惯性测量单元(imu)保证自动驾驶车辆定位精度和操作安全。采用环境感知数据输入到自动驾驶系统,自动驾驶系统根据环境感知信息作出合理的驾驶行为。
53.步骤二中,人机共驾车辆自动驾驶系统需要对传感器获得的数据进行融合处理。传感器感知的信息通过中央处理器和图形处理器进行处理,剔除无用信息,获得单一传感器无法感知的全方面信息,包括人机共驾车辆的位置、速度、加速度信息。还包括各种天气条件下(雨天、雾天、雪天)以及光线较强或较弱场景下的道路环境信息,包括人机共驾车辆周围所有类型的车辆、行人等动态交通参与者的运动状态信息、交通信号灯信息和交通标识牌、道路曲率与结构、障碍物、车道线等静态环境信息。为人机共驾车辆自动驾驶系统进行行为决策提供可靠的多环境信息维数信息,对周围环境有更充分、更准确的感知,保障自动驾驶行为决策的信息来源的全面性和可靠性,提高人机共驾车辆的行车安全性。
54.步骤三中,驾驶员根据视觉信息、听觉信息、触觉信息对当前驾驶环境进行综合态势感知,驾驶员根据驾驶经验分为一般驾驶场景和紧急驾驶场景,根据驾驶习惯做出相应的驾驶行为决策,主要包括换道、超车、跟车、左右转、停车等,具体体现为相应的驾驶动作,对方向盘、油门踏板以及制动踏板的操纵。人机共驾车辆驾驶环境做出的驾驶行为决策对应的方向盘、油门踏板以及制动踏板的控制量作为人机共驾车辆自动驾驶系统决策模型的输入,为自动驾驶系统行为决策提供依据。
55.步骤四中,自动驾驶系统决策模型通过步骤二中处理后的人机共驾车辆感知驾驶环境的数据,比如包括人机共驾车辆周围所有类型的车辆、行人等动态交通参与者的运动状态信息、交通信号灯信息和交通标识牌、道路曲率与结构、障碍物、车道线等静态环境信息。自动驾驶系统根据人机共驾车辆对本车和周围环境的感知数据以及驾驶员对人机共驾车辆做出的驾驶行为决策对应的方向盘、油门踏板以及制动踏板的控制量作为自动驾驶系
统决策模型的输入,通过已建立的语义库,采用贝叶斯推理获得自动驾驶系统行为决策结果。语义库的来源主要包括对数据库中的自动驾驶数据集进行机器学习以及专家经验知识表达形成。
56.(a)数据库建立
57.自动驾驶数据集包括高速路环境、城市道路环境、国省道路环境和隧道道路环境等大部分道路环境的数据集。数据集的来源有通过步骤一所述的装有各种传感器的实车采集的数据集,各种机构、企业、单位权威的自动驾驶数据集,已发生的交通事故采集到的数据集和通过搭建虚拟仿真平台得到的一些实车无法采集的危险驾驶场景的数据集。通过数据清理、数据集成、数据规约、数据变换等方法对自动驾驶数据集进行数据预处理。删除不符合车辆动力学模型规律的数据,填补一些由于硬件设备因素限制的缺失数据,对于一些噪声数据进行光滑的操作。对高速路环境、城市道路环境、国省道路环境和隧道道路环境等大部分道路环境的数据集进行分类,经过数据预处理后得到规范合理的车道行驶数据和交叉路口数据。对每类道路环境的数据集进行数据分析,根据数据集预期目标分为训练集和测试集。例如研究高速路道路环境的车辆换道行为,提取所有换道车辆和有限的周围驾驶环境的样本信息(同车道和相邻车道的车辆的位置、速度、加速度信息,车道线信息),以及对应的样本标签。建立好的可扩展、可维护、高性能、高可靠性的规范数据库为自动驾驶系统通过机器学习获得行为决策规律提供依据。
58.(b)语义库建立
59.通过机器学习建立语义库:
60.以决策树算法为基础,对步骤四中(a)中建立的数据库,包括包括高速路环境、城市道路环境、国省道路环境和隧道道路环境等大部分道路环境的训练集进行训练,以获取人机共驾车辆驾驶决策行为分类模型,结合自然语言处理的语言模型,对上述数据库中所有道路环境的人机共驾车辆驾驶决策行为分类模型特征提取与表示。例如,根据车道行驶数据得到的决策行为可分为换道、超车、跟车等,根据交叉路口可分为直行、左右转等。通过决策树算法对驾驶行为进行分类、统计,形成可读性强的语义库。语义库存放用自然语言描述不同驾驶场景、驾驶工况语义信息。
61.通过专家经验,语言表达建立语义库:
62.其中驾驶经验用来指导自动驾驶车辆在不同驾驶场景下的行为决策,根据专家经验可以实现对驾驶场景的高效推理,提高车辆行为决策系统的决策效率。把驾驶经验用自然语言表示出来形成驾驶经验语义库。
63.(c)决策树模型
64.根据数据库中车道行驶数据和交叉路口行驶数据人机共驾车辆有换道、超车、跟车、左右转、直行等决策行为。通过决策树算法将不同道路环境对车辆的决策行为进行分类,形成各种道路环境换道、跟车、超车、左右转、直行、停车等决策行为语义库。针对一个驾驶场景中的车辆换道数据进行决策树建模,然后按照同样方式分别应用到其他跟车、左转、右转、直行、停车等决策行为数据中。以换道为例,输入换道数据,确定影响换道决策行为的因素作为决策树特征选择的依据,包括本车道和相邻车道前后障碍物的相对位置、速度、加速度信息等,对换道数据集样本中特征参数进行特征参数区间化预处理,找到各类特征参数合适的分裂点,使整体的区间分段化计算不同特征进行分类选择后的分类情况,通过使
用最高增益率(gain ratio)的属性作为整个集合的测试属性。依次找到最好的根节点,数据集不可分则完成决策树生成。完成当前特征参数的决策树的建立之后,由该特征的不同取值建立分枝,剪枝,完成决策树的构造。
65.(d)贝叶斯推理
66.人机共驾车辆感知数据希望得到更好匹配这组数据的贝叶斯模型,贝叶斯推理是解决问题的关键。步骤四(c)建立的决策树模型对节点进行了标记,为使模型具有概率背景,将贝叶斯推理融入决策树模型,对步骤四(b)语义库表达的语义信息进行推理。首先对不同驾驶决策行为的决策树结构进行分析,确定决策树节点信息,再结合贝叶斯模型求出参数变量先验分布和参数产生数据的似然分布,贝叶斯推理采用马尔可夫链蒙特卡罗方法,通过模拟一个合适的马尔可夫链从后验分布中采样,经过贝叶斯推理得到后验分布。
67.通过贝叶斯推理,输出自动驾驶系统行为决策结果。
68.步骤五中,驾驶员决策模型和与自动驾驶系统决策模型一致性对比
69.驾驶员决策模型和自动驾驶系统决策模型输出的决策结果一致时,则表明驾驶员和机器决策的高度一致性。同时输入到人机混合决策模型中,人机混合决策模型根据二者的决策结果,通过人机一致性对比模型直接输出或者通过机器学习输出最终的驾驶决策行为结果。
70.步骤六中,人机混合决策模型建立。
71.驾驶员决策模型和自动驾驶系统决策模型同时输入到人机混合决策模型中,人机混合决策模型根据二者的决策结果,通过人机一致性对比模型直接输出或者通过机器学习得到驾驶员决策和自动驾驶系统决策分配权系数,最后输出人机混合决策系统的驾驶决策行为结果。
72.步骤七中,人机混合决策模型结果输出。
73.人机混合决策模型对当前驾驶环境驾驶员决策行为和自动驾驶系统决策行为结果进行对比,如果二者决策结果一致,人机混合决策模型输出当前决策行为结果,如果决策结果不一致,对驾驶员决策行为结果和自动驾驶决策行为结果进行决策权分配,对输出的人机混合决策模型最终的决策结果进行评价,通过机器学习获得最优的决策权分配系数,形成新的语义库,对新的语义库进行推理,最终驾驶员决策行为和自动驾驶系统决策行为结果一致时输出人机混合决策模型的决策行为结果。
74.本发明提供的一种提供的面向高度自动驾驶的人机混合决策方法。本发明涉及的驾驶环境包括乡村道路环境,城市道路环境,高速路环境等。根据已建好的语义库,自动驾驶系统通过贝叶斯推理对人机共驾车辆所处的驾驶环境做出行为决策。人机混合决策系统对驾驶员对车辆所处驾驶环境做出的决策和自动驾驶系统的决策进行一致性对比,通过机器学习输出决策结果,增强决策结果的安全性和可靠性。本发明结合了人工智能学科的技术解决面向高度自动驾驶的人机混合行为决策问题,并且能够结合多学科的先进技术手段,构建了基于人机混合决策方法的框架,把人机混合智能应用于人机共驾车辆决策系统中,使得决策更精准,效率更高,为自动驾驶车辆行为决策提供方法和依据。本发明符合人机共驾技术的发展趋势,具有广泛的应用前景和可行性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1