基于自学习的车道对中方法、系统、车辆及存储介质与流程
1.本发明属于车辆控制技术领域,具体涉及一种基于自学习的车道对中方法、系统、车辆及存储介质。
背景技术:
2.如专利文献cn108263381a公开的一种车辆及其应用的车道对中控制方法及系统中,集成式自适应巡航由一个前向毫米波雷达和一个前置智能摄像头实现车型在单车道的横纵向控制。对于横向控制模块,由前向毫米波雷达实时检测前方道路的车道线及目标情况,及本车行驶中心距离左右车道线的距离,模拟出期望行驶轨迹,并根据偏差值计算出方向盘转角给eps执行。
3.整车转向角传感器角度(sas)与方向盘定位、四轮定位均在车辆检测线进行,由于从方向盘、转向角传感器、转向柱、转向节、轮端等整个转向链存在间隙,会存在车辆居中时sas角度有偏差的情况。eps根据sas角度进行执行以及校验会存在偏差,导致车辆控制不稳定及不居中情况。
4.因此,有必要开发一种基于自学习的车道对中方法、系统、车辆及存储介质。
技术实现要素:
5.本发明的目的在于提供一种基于自学习的车道对中方法、系统、车辆及存储介质,通过自学习优化自适应巡航控制对中性能。
6.第一方面,本发明所述的一种基于自学习的车道对中方法,包括以下步骤:
7.在驾驶辅助横向控制功能激活时,获取高级驾驶辅助系统adas输出的横向请求值aadas和上一次下电时所存储的横向请求偏差值及系数μα;
8.将横向请求值aadas加上横向请求偏差值α作为车道保持辅助系统las输出给电动助力转向系统eps的横向请求值ades,即:
9.ades=aadas+α(1);
10.并在行驶过程中对横向请求偏差值进行实时修正;
11.其中,对横向请求偏差值进行实时修正方法为:
12.获取当前车辆的横摆角速度γ和车速v;
13.当车辆处于点火状态,γ小于预设横摆角速度,且v大于第一预设车速时,获取汽车安全辅助系统sas的当前角度值θi,连续获取n个周期,并计算平均值,即得到新的横向请求偏差值α,并寄存至控制器内;
14.若|α|小于等于预设横向请求偏差值,当γ小于预设横摆角速度,v大于第一预设车速时,且持续m1秒时,则修正横向请求偏差值;
15.若|α|大于预设横向请求偏差值,当前点火循环第一次修正横向请求偏差值需满足以下条件:
16.(1)行驶里程大于预设行驶里程;
17.(2)γ小于预设横摆角速度,v大于第二预设车速时,且持续m2秒;
18.若|α|大于预设横向请求偏差值,当前点火循环非第一次修正横向请求偏差值需满足以下条件:
19.γ小于预设横摆角速度,且v大于第一预设车速,且持续m1秒的条件。
20.可选地,对横向请求偏差值进行限制,具体为:
[0021][0022]
其中,为偏差值上限值。
[0023]
可选地,引入偏差系数μ,用以匹配偏差值对横向控制的影响,即ades=aadas+μα
[0024]
可选地,所述预设横摆角速度为0.005rad/s,第一预设车速为40kph。
[0025]
可选地,所述预设横向请求偏差值为0.8度,所述m1为6s。
[0026]
可选地,所述第二预设车速为60kph;所述m2为20s。
[0027]
可选地,所述预设行驶里程为10公里。
[0028]
第二方面,本发明所述的一种基于自学习的车道对中系统,包括存储器和控制器,所述存储器内存储有计算机可读程序,所述计算机可读程序被控制器调用时能执行如本发明所述的基于自学习的车道对中方法的步骤。
[0029]
第三方面,本发明所述的一种车辆,采用如本发明所述的基于自学习的车道对中系统。
[0030]
第四方面,本发明一种存储介质,其内存储有计算机可读程序,所述计算机可读程序被调用时能执行如本发明所述的基于自学习的车道对中方法的步骤。
[0031]
本发明具有以下优点:
[0032]
(1)通过自学习优化自适应巡航控制对中性能;
[0033]
(2)减小了对转向系统偏差对系统的影响;
[0034]
(3)由于随着车辆行驶时间增加,四轮定位、转向及sas的偏差会变大,增加自学习会实时监控sas,增加了系统的鲁棒性。
附图说明
[0035]
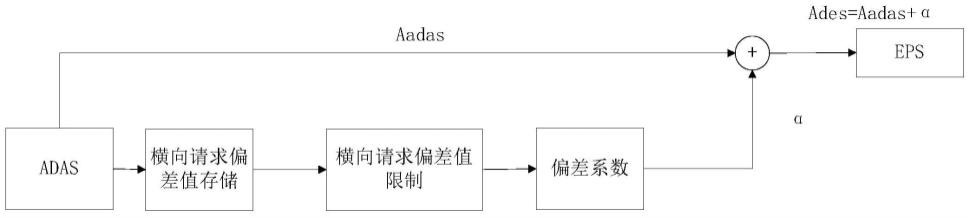
图1是本实施例的原理图;
[0036]
图2是本实施例的流程图。
具体实施方式
[0037]
以下将结合附图对本发明进行详细的说明。
[0038]
如图1所示,本实施例中,一种基于自学习的车道对中方法,包括以下步骤:
[0039]
在驾驶辅助横向控制功能激活时,获取高级驾驶辅助系统adas输出的横向请求值aadas和上一次下电时所存储的横向请求偏差值及系数μα;
[0040]
将横向请求值aadas加上横向请求偏差值α作为车道保持辅助系统las输出给电动助力转向系统eps的横向请求值ades,即:
[0041]
ades=aadas+α(1);
[0042]
并在行驶过程中对横向请求偏差值进行实时修正。
[0043]
本实施例中,对横向请求偏差值进行实时修正方法为:
[0044]
获取当前车辆的横摆角速度γ和车速v;
[0045]
当车辆处于点火状态,γ小于预设横摆角速度,且v大于第一预设车速时,获取汽车安全辅助系统sas的当前角度值θi,连续获取n个周期,并计算平均值,即得到新的横向请求偏差值α,并寄存至控制器内。
[0046]
本实施例中,横向请求偏差值α的计算公式如下:
[0047][0048]
若|α|小于等于预设横向请求偏差值,当γ小于预设横摆角速度,v大于第一预设车速时,且持续m1秒时,则修正横向请求偏差值,即将公式(1)中的横向请求偏差值用新计算出的横向请求偏差值来替代。
[0049]
若|α|大于预设横向请求偏差值,当前点火循环第一次修正横向请求偏差值(将公式(1)中的横向请求偏差值用新计算出的横向请求偏差值来替代)需满足以下条件:
[0050]
(1)行驶里程大于预设行驶里程;
[0051]
(2)γ小于预设横摆角速度,v大于第二预设车速时,且持续m2秒;
[0052]
若|α|大于预设横向请求偏差值,当前点火循环非第一次修正横向请求偏差值需满足以下条件:
[0053]
γ小于预设横摆角速度,且v大于第一预设车速,且持续m1秒的条件。
[0054]
本实施例中,鉴于整车转向系统的间隙存在偏差,若存在偶发偏差值过大,存在误差时会导致横向控制不稳定,故需要对横向请求偏差值进行限制,具体为:
[0055][0056]
其中,为偏差值上限值。在[-5-5]范围内,为标定值。
[0057]
可选地,引入偏差系数μ,用以匹配偏差值对横向控制的影响,即
[0058]
ades=aadas+μα
[0059]
本实施例中,当车辆处于点火状态,γ《0.005rad/s,且v》40kph时,获取汽车安全辅助系统sas的当前角度值θi,连续获取n个周期,并计算平均值,即得到新的横向请求偏差值α,并寄存至控制器内;
[0060]
若|α|≤0.8度,当γ《0.005rad/s,v》40kph,且持续6秒时,则修正横向请求偏差值;
[0061]
若|α|>0.8度,当前点火循环第一次修正横向请求偏差值需满足以下条件:
[0062]
(1)行驶里程大于10公里;
[0063]
(2)γ《0.005rad/s,v》60kph,且持续20s;
[0064]
若|α|>0.8度,当前点火循环非第一次修正横向请求偏差值需满足以下条件:
[0065]
γ《0.005rad/s,且v》40kph,且持续6秒的条件。
[0066]
本实施例中,在下电时,将当前的横向请求偏差值及系数μα进行保存,并作为下一次上电的初始值。
[0067]
本实施例中,一种基于自学习的车道对中系统,包括存储器和控制器,所述存储器内存储有计算机可读程序,所述计算机可读程序被控制器调用时能执行如本实施例中所述
的基于自学习的车道对中方法的步骤。
[0068]
本实施例中,一种车辆,采用如本实施例中所述的基于自学习的车道对中系统。
[0069]
本实施例中,一种存储介质,其内存储有计算机可读程序,所述计算机可读程序被调用时能执行如本实施例中所述的基于自学习的车道对中方法的步骤。
[0070]
上述实施例为本发明方法较佳的实施方式,但本发明方法的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1