一种基于步进电机和角度传感器的线控制动装置及控制方法与流程
本发明属于自动驾驶,特别是涉及一种基于步进电机和角度传感器的线控制动装置及控制方法。
背景技术:
1、现在许多普通汽车不具备自动驾驶功能,不能实现自动制动,当其需要改制成自动驾驶能够实现自动制动而又不改变原车的驾驶习惯时,就要求有一套自动制动装置适合安装在原车上而又对原车改动破坏量小。
2、市场上现有自动驾驶汽车的线控制动系统应用在普通汽车上时,需要对普通汽车进行多方面的拆解、破坏和改造,改动量多,破坏量大,且成本较高,从而不便于在普通汽车上进行改装。
技术实现思路
1、本发明的目的在于提供一种基于步进电机和角度传感器的线控制动装置,通过驱动装置带动扇形齿轮转动,并利用导轮轴下压汽车的制动踏板,实现制动控制,解决了现有自动驾驶汽车的线控制动系统,不便于在普通汽车上进行改装的问题。
2、为解决上述技术问题,本发明是通过以下技术方案实现的:
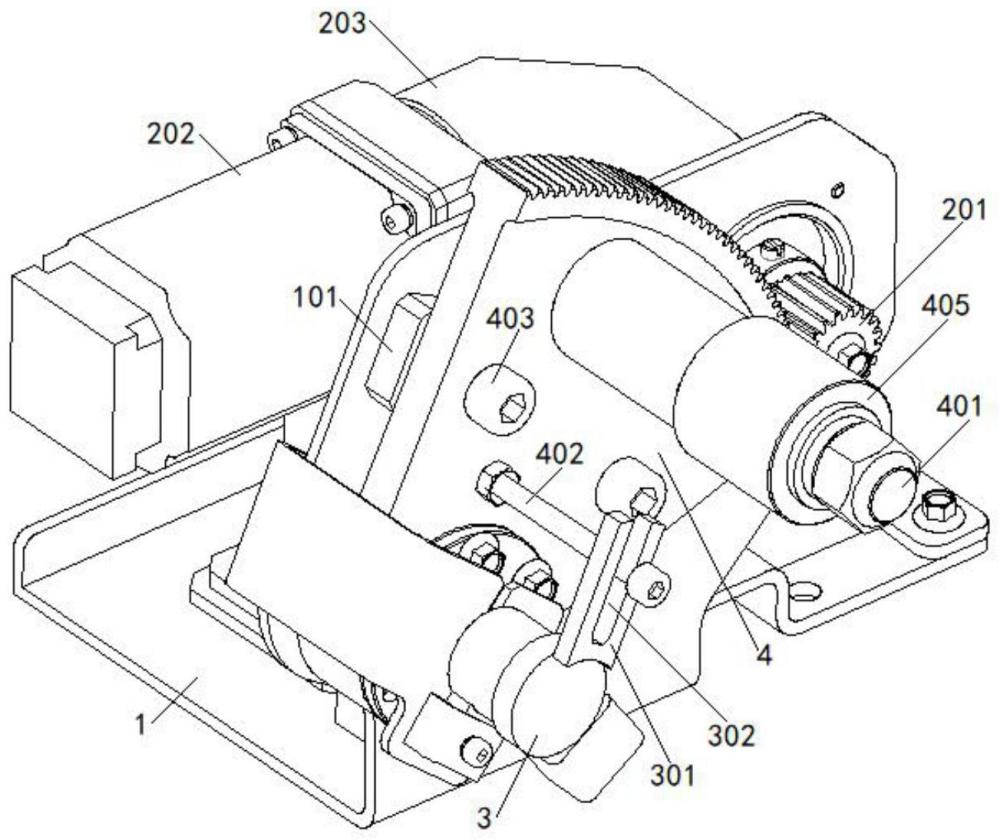
3、本发明为一种基于步进电机和角度传感器的线控制动装置,包括安装支架,以及固定安装于安装支架上的驱动装置和角度传感器,转动连接于安装支架上的扇形齿轮;所述驱动装置的输出端连接有与扇形齿轮啮合的主动齿轮;所述角度传感器与扇形齿轮的回转中心同心设置,所述角度传感器的回转体固定连接有u形卡件;所述扇形齿轮侧面固定连接有导轮轴,以及与u形卡件配合的定位杆,用于通过主动齿轮带动扇形齿轮转动,并通过导轮轴下压汽车的制动踏板,并通过定位杆与u形卡件配合,带动角度传感器转动。
4、作为本发明的一种优选技术方案,所述驱动装置包括步进电机,以及与步进电机连接的减速机;所述主动齿轮连接于减速机的输出端。
5、作为本发明的一种优选技术方案,所述u形卡件为条形板结构,并沿长度方向开设有直槽口,且定位杆贯穿直槽口。
6、作为本发明的一种优选技术方案,所述扇形齿轮侧面固定连接有上限限位销,且安装支架侧面固定连接有与上限限位销配合的上限限位块,用于对扇形齿轮转动位置进行限定。
7、作为本发明的一种优选技术方案,所述扇形齿轮侧面固定连接有下限限位销,且安装支架侧面固定连接有与下限限位销配合的下限限位块,用于对扇形齿轮转动位置进行限定。
8、作为本发明的一种优选技术方案,所述导轮轴转动连接有导轮,并通过导轮与汽车的制动踏板配合。
9、一种基于步进电机和角度传感器的线控制动装置的控制方法,包括以下步骤:
10、步骤一:初始化;通过控制系统使能驱动装置,利用主动齿轮带动扇形齿轮转动,并通过导轮轴下压汽车的制动踏板,并确定角度传感器反馈的电压信号与制动踏板开度间的对应关系;
11、步骤二:实时控制时,控制系统计算制动踏板的目标开度,并使能驱动装置,利用主动齿轮带动扇形齿轮转动,并通过导轮轴下压汽车的制动踏板;
12、步骤三:当驱动装置使能时,通过角度传感器反馈的电压信号,确定制动踏板的开度位置。
13、本发明具有以下有益效果:
14、本发明通过在安装支架上安装驱动装置和角度传感器,以及转动连接的扇形齿轮,通过驱动装置带动扇形齿轮转动,并利用扇形齿轮侧面的导轮轴对汽车的止动踏板进行下压,实现汽车的制动,从而实现对汽车的自动控制,安装线控制动装置时,将安装支架安装在现有普通汽车上的制动踏板附近即可,大大的降低了对普通汽车的拆解、破坏和改造程度,从而便于在普通汽车上进行改装,有效的降低了整体的改装成本。
15、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种基于步进电机和角度传感器的线控制动装置,其特征在于:包括安装支架(1),以及固定安装于安装支架(1)上的驱动装置(2)和角度传感器(3),转动连接于安装支架(1)上的扇形齿轮(4);
2.根据权利要求1所述的一种基于步进电机和角度传感器的线控制动装置,其特征在于,所述驱动装置(2)包括步进电机(202),以及与步进电机(202)连接的减速机(203);所述主动齿轮(201)连接于减速机(203)的输出端。
3.根据权利要求1所述的一种基于步进电机和角度传感器的线控制动装置,其特征在于,所述u形卡件(301)为条形板结构,并沿长度方向开设有直槽口(302),且定位杆(402)贯穿直槽口(302)。
4.根据权利要求1所述的一种基于步进电机和角度传感器的线控制动装置,其特征在于,所述扇形齿轮(4)侧面固定连接有上限限位销(403),且安装支架(1)侧面固定连接有与上限限位销(403)配合的上限限位块(101),用于对扇形齿轮(4)转动位置进行限定。
5.根据权利要求1或4所述的一种基于步进电机和角度传感器的线控制动装置,其特征在于,所述扇形齿轮(4)侧面固定连接有下限限位销(404),且安装支架(1)侧面固定连接有与下限限位销(404)配合的下限限位块(102),用于对扇形齿轮(4)转动位置进行限定。
6.根据权利要求1所述的一种基于步进电机和角度传感器的线控制动装置,其特征在于,所述导轮轴(401)转动连接有导轮(405),并通过导轮(405)与汽车的制动踏板配合。
7.根据权利要求1~6任意一项所述的一种基于步进电机和角度传感器的线控制动装置的控制方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种基于步进电机和角度传感器的线控制动装置,涉及自动驾驶技术领域。本发明包括安装支架,以及安装于安装支架上的驱动装置和角度传感器,转动连接于安装支架上的扇形齿轮;驱动装置的输出端连接有主动齿轮;角度传感器与扇形齿轮的回转中心同心设置,角度传感器的回转体连接有U形卡件;扇形齿轮侧面连接有导轮轴,以及与U形卡件配合的定位杆,用于通过扇形齿轮转动,并利用导轮轴下压汽车的制动踏板,并通过定位杆与U形卡件配合,带动角度传感器转动。本发明通过驱动装置带动扇形齿轮转动,并利用导轮轴下压汽车的制动踏板,实现制动控制,解决了现有自动驾驶汽车的线控制动系统,不便于在普通汽车上进行改装的问题。
技术研发人员:詹绍将,姜波,金希佳,陈晓雪
受保护的技术使用者:合肥智行通智能科技有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!