一种基于AFS和DYC的轮毂式电动汽车协调控制方法
一种基于afs和dyc的轮毂式电动汽车协调控制方法
技术领域
1.本发明涉及轮毂式电动汽车的底盘协调控制,特别涉及车辆行驶状态判定和afs控制器、dyc控制器的协调权重设计,属于汽车主动安全控制领域。
背景技术:
2.众所周知,车辆主动安全系统在减少交通事故中扮演十分重要的角色,能够在车辆快要失去控制之前,主要进行干预。近些年来,随着电子技术的发展,各种新技术不断应用到汽车上以提高其行驶安全性,如afs、dyc、esp等,它们都是通过控制汽车的侧向力来实现对横摆运动的控制。
3.主动前轮转向系统(afs)是指在车辆轮胎侧向力的线性范围内,通过产生不依赖于方向盘转角的附加前轮转角,改变车辆的侧向力,提高转向稳定性。然而,afs在轮胎侧向力达到极限值之后的控制效果是有限的,这时需要借助其他主动安全控制系统。
4.直接横摆力矩控制(dyc)是一种车辆横向稳定性的控制方法,借助于驾驶员操纵信号以及车辆状态信息,然后利用左右轮之间驱动力或者制动力的差异,以此产生的附加横摆力矩来提高转弯过程的稳定性。尽管dyc在极限工况下依然可以保持较好的控制能力,但是会对车辆的纵向运动产生较大影响,造成车速降低,影响乘车舒适性等问题。
技术实现要素:
5.为了解决电动汽车afs和dyc的协调控制问题,本发明提出了一种基于afs和dyc的轮毂式电动汽车协调控制装置,来解决afs和dyc之间相互耦合的问题,该装置可以最大程度发挥各子系统的功能,不仅提高了车辆行驶在极端工况下稳定性,还增加了乘客的乘车舒适性。
6.本发明的技术方案包括以下部分:
7.一种基于afs和dyc的轮毂式电动汽车协调控制装置,该装置主要含质心侧偏角观测模块、侧向加速度传感器、状态辨识模块、afs模块、dyc模块以及协调控制模块,其中,
8.质心侧偏角观测模块:用于实时观测质心侧偏角的值,并将质心侧偏角及其导数的值发送到状态辨识模块;
9.侧向加速度传感器:用于采集检测车辆的实际侧向加速度,并将其值发送到状态辨识模块;
10.状态辨识模块:将收集到的质心侧偏角及其导数的值和侧向加速度的值进行分析,并根据上述状态变量对车辆行驶区域进行判定划分;
11.协调控制模块:根据状态辨识模块划分的结果,对afs控制器和dyc控制器的两者权重进行设计;
12.afs模块:提供一个独立于驾驶员之外的附加前轮转向角;
13.dyc模块:将附加横摆力矩转化为制动/驱动力矩分配给四轮。
14.进一步,一种基于afs和dyc的轮毂式电动汽车协调控制装置,包括以下步骤:
15.步骤1、构建车辆线性二自由度车辆动力学模型,根据实际横摆角速度与其理想值的误差,设计一种基于扰动观测的主动前轮转向二阶滑模控制器;
16.步骤2、构建车辆非线性七自由度车辆动力学模型,根据实际横摆角速度与其理想值的误差,设计一种新的自适应超螺旋直接横摆力矩滑模控制器;
17.步骤3、构建参数性能指标分析模块,将状态观测器观测的实际质心侧偏角及其导数的值以及侧向加速度传感器获取的实时值传递至状态辨识模块;
18.步骤4、状态辨识模块对已收集到的质心侧偏角及其导数值和侧向加速度值进行严格定量分析,并依据上述状态变量对车辆行驶区域进行判定划分;
19.步骤5、根据状态辨识模块对车辆行驶区域划分的结果,对权值分配系数进行设计;
20.步骤6、将权值分配系数输出至afs子系统和dyc子系统,构建协调控制模块。
21.进一步,在所述步骤1中,基于扰动观测的主动前轮转向二阶滑模控制器设计过程如下:
22.首先,构建以下包含扰动的车辆线性二自由度模型:
[0023][0024]
其中,β为质心侧偏角,ωr为横摆角速度,kf、kr分别为前、后轮侧偏刚度,m为整车质量,v
x
为纵向车速,a、b分别为质心到前、后轴的距离,δf为前轮转角输入,d(t)为包含系统不确定和外界干扰的集总扰动;
[0025]
基于上述线性二自由度模型,得到理想横摆角速度ω
rd
的计算公式如下:
[0026][0027]
其中,稳定系数l=a+b,μ为路面附着系数,g为重力加速度;
[0028]
最终,基于扰动观测的主动前轮转向二阶滑模控制器δf设计为
[0029][0030]
其中,s=ω
r-ω
rd
,,为质心侧偏角观测值,λ、α为控制增益,v为中间变量,m为待调参数,是对集总扰动的估计值,sign为符号函数。
[0031]
进一步,在所述步骤1中,二阶滑模控制器由以下控制算法得来
[0032][0033]
其中,x1、x2为状态变量,λ、α为控制增益,m≥2为待调参数。
[0034]
进一步,在所述步骤1中,扰动的估计值由以下扰动观测模块得来
[0035]
其中,p为内部状态,l1为增益,g1=b2,g2=1,f=a
21
β+a
22
ωr,滑动变量s=ω
r-ω
rd
,δf为afs模块前轮转角输入。
[0036]
进一步,在所述步骤2中,一种新的自适应超螺旋直接横摆力矩滑模控制器设计过程如下:
[0037]
首先,构建车辆非线性七自由度模型:
[0038][0039]
其中,iz为转动惯量,ωr为横摆角速度,f
yfl
、f
yfr
、f
yrl
、f
yrr
分别为左前轮、右前轮、左后轮、右后轮的侧向力,a、b分别为质心到前、后轴的距离,df为前轮轮距,mz为附加横摆力矩,δ为前轮转向角;
[0040]
接着,依据上述模型设计一种新的自适应超螺旋直接横摆力矩滑模控制器:
[0041][0042]
其中,s=ω
r-ω
rd
,υ为中间变量,为自适应增益。
[0043]
进一步,在所述步骤2中,自适应增益由以下的自适应模块得来
[0044][0045]
其中,ρ1、ρ2、k1、k2为待调参数,x1=s,自适应模块被用来实时更新控制增益。
[0046]
进一步,在所述步骤3中,参数性能指标分析模块构建过程如下:
[0047]
首先,构建质心侧偏角观测器,对二自由度模型进行改写
[0048][0049]
基于上述方程,构建状态方程
[0050][0051]
根据状态方程,设计观测器
[0052][0053]
则质心侧偏角的估算值为
[0054][0055]
其中,z1和z2分别为状态变量x1、x2的跟踪值,β1、β2为观测器增益,h为集总扰动的上界;
[0056]
接着,根据观测的质心侧偏角及其导数的值,并借助相平面法,定义质心侧偏角性能指标
[0057][0058]
其中,si代表性能指标,β、分别为质心侧偏角及其导数;
[0059]
然后,根据侧向加速度传感器获取的实时值,定义侧向加速度的性能指标(0.22-0.002v
x
)g≤ay<0.67μg,
[0060]
其中,ay为侧向加速度,v
x
为纵向车速,μ为路面附着系数,g为重力加速度。
[0061]
进一步,在所述步骤4中,状态辨识模块对已收集到的质心侧偏角及其导数值和侧向加速度值进行严格定量分析,并依据上述状态变量对车辆行驶区域进行判定划分:
[0062]
(1)饱和区域
[0063]
si>1或ay≥0.67μg,
[0064]
(2)线性区域
[0065]
si≤0.8且ay<(0.22-0.002v
x
)g,
[0066]
(3)非线性区域
[0067]
其余情况。
[0068]
进一步,在所述步骤5中,根据状态辨识模块对车辆行驶区域划分的结果,对权值分配系数进行设计:
[0069]
(1)饱和区域
[0070]
η
dyc
=1,
[0071]
η
afs
=0
[0072]
(2)非线性区域
[0073][0074]
η
afs
=1-η
dyc
[0075]
(3)线性区域
[0076]
η
dyc
=0,
[0077]
η
afs
=1
[0078]
其中,η
afs
、η
dyc
分别代表afs控制器和dyc控制器的权重。
[0079]
进一步,在所述步骤6中,将权值分配系数输出至afs子系统和dyc子系统,构建协调控制模块:
[0080]
u=η
af
sδf+η
dycmz
,
[0081]
其中,δf为afs模块前轮转角输入,mz为dyc模块附加横摆力矩。
[0082]
本发明具有的突出效果如下:
[0083]
1)在对车辆行驶状态的判别过程中将质心侧偏角和侧向加速度两种状态变量同时纳入考虑范畴,对其进行定量分析,根据结果进行权值分配,提高控制效果;
[0084]
2)所提出的协调控制策略不仅能保证车辆安全稳定性,还可以提升乘坐舒适性。
附图说明
[0085]
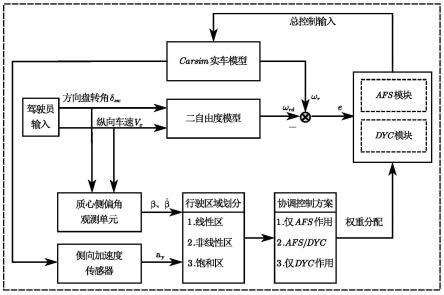
图1是本发明的控制系统整体结构框图。
[0086]
图2是极端工况下的侧向风干扰随时间的变化曲线。
[0087]
图3是极端工况下的方向盘转角随时间的变化曲线。
[0088]
图4是极端工况下的横摆角速度随时间的变化曲线。
[0089]
图5是极端工况下的质心侧偏角随时间的变化曲线。
[0090]
图6是极端工况下的dyc单独控制的四轮转矩随时间的变化曲线。
[0091]
图7是极端工况下的协调控制的四轮转矩随时间的变化曲线。
[0092]
图8是极端工况下的车辆行驶轨迹随时间的变化曲线。
具体实施方式
[0093]
本发明提供了一种基于afs和dyc的轮毂式电动汽车协调控制装置。为使本发明的目的、技术方案及效果更加清楚、明确,以下将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述。应当理解的是,此处描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0094]
图1所示是本发明的系统结构框图,它包括车辆系统、质心侧偏角观测模块、侧向加速度传感器、状态辨识模块、afs模块、dyc模块以及协调控制模块。
[0095]
基于上述系统,下面通过采用carism和simulink联合仿真,解释本发明对极端工况下的汽车稳定控制方法,选取自主设计的复杂极端实验工况,车速为80km/h,路面附着系数为0.5,仿真时长为15s。
[0096]
一种基于afs和dyc的轮毂式电动汽车协调控制装置,该装置主要含质心侧偏角观测模块、侧向加速度传感器、状态辨识模块、afs模块、dyc模块以及协调控制模块,其中,
[0097]
质心侧偏角观测模块:用于实时观测质心侧偏角的值,并将质心侧偏角及其导数的值发送到状态辨识模块;
[0098]
侧向加速度传感器:用于采集检测车辆的实际侧向加速度,并将其值发送到状态辨识模块;
[0099]
状态辨识模块:将收集到的质心侧偏角及其导数的值和侧向加速度的值进行分
析,并根据上述状态变量对车辆行驶区域进行判定划分;
[0100]
协调控制模块:根据状态辨识模块划分的结果,对afs控制器和dyc控制器的两者权重进行设计;
[0101]
afs模块:提供一个独立于驾驶员之外的附加前轮转向角;
[0102]
dyc模块:将附加横摆力矩转化为制动/驱动力矩分配给四轮。
[0103]
进一步,一种基于afs和dyc的轮毂式电动汽车协调控制装置,包括以下步骤:
[0104]
步骤1、构建车辆线性二自由度车辆动力学模型,根据实际横摆角速度与其理想值的误差,设计一种基于扰动观测的主动前轮转向二阶滑模控制器;
[0105]
步骤2、构建车辆非线性七自由度车辆动力学模型,根据实际横摆角速度与其理想值的误差,设计一种新的自适应超螺旋直接横摆力矩滑模控制器;
[0106]
步骤3、构建参数性能指标分析模块,将状态观测器观测的实际质心侧偏角及其导数的值以及侧向加速度传感器获取的实时值传递至状态辨识模块;
[0107]
步骤4、状态辨识模块对已收集到的质心侧偏角及其导数值和侧向加速度值进行严格定量分析,并依据上述状态变量对车辆行驶区域进行判定划分;
[0108]
步骤5、根据状态辨识模块对车辆行驶区域划分的结果,对权值分配系数进行设计;
[0109]
步骤6、将权值分配系数输出至afs子系统和dyc子系统,构建协调控制模块。
[0110]
进一步,在所述步骤1中,基于扰动观测的主动前轮转向二阶滑模控制器设计过程如下:
[0111]
首先,构建以下包含扰动的车辆线性二自由度模型:
[0112][0113]
其中,β为质心侧偏角,ωr为横摆角速度,kf、kr分别为前、后轮侧偏刚度,m为整车质量,v
x
为纵向车速,a、b分别为质心到前、后轴的距离,δf为前轮转角,d(t)为包含系统不确定和外界干扰的集总扰动;
[0114]
基于上述线性二自由度模型,得到理想横摆角速度ω
rd
的计算公式如下:
[0115][0116]
其中,稳定系数l=a+b,μ为路面附着系数,g为重力加速度;
[0117]
最终,基于扰动观测的主动前轮转向二阶滑模控制器δf设计为
[0118][0119]
其中,s=ω
r-ω
rd
,,
为质心侧偏角观测值,λ、α为控制增益,v为中间变量,m为待调参数,是对集总扰动的估计值,sign为符号函数。
[0120]
进一步,在所述步骤1中,二阶滑模控制器由以下控制算法得来
[0121][0122]
其中,x1、x2为状态变量,λ、α为控制增益,m≥2为待调参数。
[0123]
进一步,在所述步骤1中,扰动的估计值由以下扰动观测模块得来
[0124][0125]
其中,p为内部状态,l1为增益,g1=b2,g2=1,f=a
21
β+a
22
ωr,滑动变量s=w
r-w
rd
,δf为afs模块输入。
[0126]
进一步,在所述步骤2中,一种新的自适应超螺旋直接横摆力矩滑模控制器设计过程如下:
[0127]
首先,构建车辆非线性七自由度模型:
[0128][0129]
其中,iz为转动惯量,wr为横摆角速度,f
ufl
、f
yfr
、f
yrl
、f
yrr
分别为左前轮、右前轮、左后轮、右后轮的侧向力,a、b分别为质心到前、后轴的距离,df为前轮轮距,mz为附加横摆力矩,δ为前轮转向角;
[0130]
接着,依据上述模型设计一种新的自适应超螺旋直接横摆力矩滑模控制器:
[0131][0132]
其中,s=ω
r-ω
rd
,v为中间变量,为自适应增益。
[0133]
进一步,在所述步骤2中,自适应增益由以下的自适应模块得来
[0134][0135]
其中,ρ1、ρ2、k1、k2为待调参数,x1=s,自适应模块被用来实时更新控制增益。
[0136]
进一步,在所述步骤3中,参数性能指标分析模块构建过程如下:
[0137]
首先,构建质心侧偏角观测器,对二自由度模型进行改写
[0138]
[0139]
基于上述方程,构建状态方程
[0140][0141]
根据状态方程,设计观测器
[0142][0143]
则质心侧偏角的估算值为
[0144][0145]
其中,z1和z2分别为状态变量x1、x2的跟踪值,β1、β2为观测器增益,h为集总扰动的上界;
[0146]
接着,根据观测的质心侧偏角及其导数的值,并借助相平面法,定义质心侧偏角性能指标
[0147][0148]
其中,si代表性能指标,β、分别为质心侧偏角及其导数;
[0149]
然后,根据侧向加速度传感器获取的实时值,定义侧向加速度的性能指标(0.22-0.002v
x
)g≤ay<0.67μg,
[0150]
其中,ay为侧向加速度,v
x
为纵向车速,μ为路面附着系数,g为重力加速度。
[0151]
进一步,在所述步骤4中,状态辨识模块对已收集到的质心侧偏角及其导数值和侧向加速度值进行严格定量分析,并依据上述状态变量对车辆行驶区域进行判定划分:
[0152]
(1)饱和区域
[0153]
si>1或ay≥0.67μg,
[0154]
(2)线性区域
[0155]
si≤0.8且ay<(0.22-0.002v
x
)g,
[0156]
(3)非线性区域
[0157]
其余情况。
[0158]
进一步,在所述步骤5中,根据状态辨识模块对车辆行驶区域划分的结果,对权值分配系数进行设计:
[0159]
(1)饱和区域
[0160]
η
dyc
=1,
[0161]
η
afs
=0
[0162]
(2)非线性区域
[0163][0164]
η
afs
=1-η
dyc
[0165]
(3)线性区域
[0166]
η
dyc
=0,
[0167]
η
afs
=1
[0168]
其中,η
4fs
、η
dyc
分别代表afs控制器和dyc控制器的权重。
[0169]
进一步,在所述步骤6中,将权值分配系数输出至afs子系统和dyc子系统,构建协调控制模块:
[0170]
u=η
afs
δf+η
dycmz
,
[0171]
其中,δf为afs模块前轮转角输入,mz为dyc模块附加横摆力矩。
[0172]
为了对比afs单独控制、dyc单独控制和协调控制控制效果,基于matlab和carsim软件搭建了仿真平台,用于验证在有横风干扰情况下三种控制的有效性。设置车辆的初速度为80km/h,在路面附着系数为0.5的路面上,进行了仿真实验。图2是极端工况下的侧向风干扰随时间的变化曲线。图3是极端工况下的方向盘转角随时间的变化曲线。图4是极端工况下的横摆角速度随时间的变化曲线。图5是极端工况下的质心侧偏角随时间的变化曲线。图6是极端工况下的dyc单独控制的四轮转矩随时间的变化曲线。图7是极端工况下的协调控制的四轮转矩随时间的变化曲线。图8是极端工况下的车辆行驶轨迹随时间的变化曲线。
[0173]
通过极端工况的仿真实验,综合来说,协调控制器的控制效果要比afs单独控制和dyc单独控制要好,并且协调控制器下分配给四轮的转矩更小,在保证安全的前提下,对乘车舒适性的影响更小。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1