一种基于编码标靶的移动充电机器人定位方法及系统
1.本发明涉及机器人导航定位技术领域,具体而言,涉及一种基于编码标靶的移动充电机器人定位方法及系统。
背景技术:
2.移动充电机器人已经在工业、商用、家用等领域得到了广泛使用,完成物料转运、导购导览、扫地拖地等任务。当前的技术主要是依赖于传感器的实时数据与周围场景中的地图进行匹配,不断地估计当前时间帧的最佳位置。
3.目前,移动充电机器人通过传感器感知周围环境和自身状态,进而实现在有障碍物的环境中向目标自主运动,这就是通常所提到的智能自主移动充电机器人的导航技术,而定位则是确定机器人在工作环境中相对于全局坐标的位置及基本姿态,是移动充电机器人导航的基本环节。然而,在机器人的系统关闭断电重启,或者机器人受到人为干预发生异常状态时,机器人就会丢失对当前的定位。
技术实现要素:
4.本发明解决的问题是如何满足移动充电机器人在复杂动态场景作业时的安全自主导航需求,提高移动充电机器人环境的适应性和智能性。
5.为解决上述问题,本发明提供一种基于编码标靶的移动充电机器人定位方法,包括步骤:
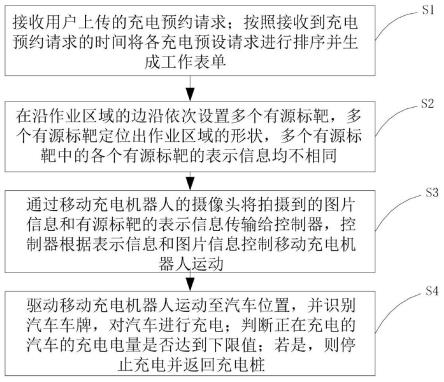
6.s1:接收用户上传的充电预约请求;按照接收到充电预约请求的时间将各充电预设请求进行排序并生成工作表单;
7.s2:在沿作业区域的边沿依次设置多个有源标靶,多个有源标靶定位出作业区域的形状,多个有源标靶中的各个有源标靶的表示信息均不相同;
8.s3:通过移动充电机器人的摄像头将拍摄到的图片信息和有源标靶的表示信息传输给控制器,控制器根据表示信息和图片信息控制移动充电机器人运动;
9.s4:驱动移动充电机器人运动至汽车位置,并识别汽车车牌,对汽车进行充电;判断正在充电的汽车的充电电量是否达到下限值;若是,则停止充电并返回充电桩。
10.在上述方法中,通过采用多个有源标靶定位出作业区域的形状,可以判断出移动充电机器人与有源标靶的距离。由于多个有源标靶中的各个有源标靶的表示信息均不相同,当移动充电机器人上的摄像头将拍摄到的有源标靶的表示信息发送给控制器后,控制器可以根据不同的表示信息分辨出不同的有源标靶,从而判断出移动充电机器人在作业区域中的方位。通过将摄像头拍摄到的图片信息发送给控制器,控制器提取图片信息中有源标靶的数据和相关数据,准确判断出移动充电机器人在作业区域中的准确位置。
11.在上述方法中,充电预约请求包括汽车位置、汽车型号、汽车车牌、取车时间、汽车剩余电量、充电电量下限值以及上限值,所述充电电量为充电完毕后的电量。其中,排序规则为按照接收时间升序排列。
12.进一步地,所述步骤s1包括:
13.s11:根据汽车型号获取汽车充电功率;根据充电功率以及充电电量的下限值计算最少充电时间;
14.s12:根据最少充电时间以及排列顺序计算各汽车的充电完毕时间。
15.进一步地,所述步骤s12包括:
16.s121:判断充电完毕时间是否晚于与汽车对应的充电预约请求中的取车时间;若是,则拒绝该充电预约请求;若否,则将工作表单中排序第一的汽车设定为充电目标。
17.进一步地,所述步骤s3包括:
18.s31:将多个有源标靶的位置信息以及编码信息发送给控制器,控制器根据表示信息和编码信息确认对应的有源标靶的位置信息。
19.一种基于编码标靶的移动充电机器人定位系统,包括:
20.排序工作表单生成模块:用于接收用户上传的充电预约请求;按照接收到充电预约请求的时间将各充电预设请求进行排序并生成工作表单;
21.有源标靶设置模块:用于在沿作业区域的边沿依次设置多个有源标靶,多个有源标靶定位出作业区域的形状,多个有源标靶中的各个有源标靶的表示信息均不相同;
22.主控设备:用于通过移动充电机器人的摄像头将拍摄到的图片信息和有源标靶的表示信息传输给控制器,控制器根据表示信息和图片信息控制移动充电机器人运动;
23.驱动识别模块:驱动移动充电机器人运动至汽车位置,并识别汽车车牌,对汽车进行充电;判断正在充电的汽车的充电电量是否达到下限值;若是,则停止充电并返回充电桩。
24.进一步地,所述排序工作表单生成模块包括:
25.第一计算单元:用于根据汽车型号获取汽车充电功率;根据充电功率以及充电电量的下限值计算最少充电时间;
26.第二计算单元:用于根据最少充电时间以及排列顺序计算各汽车的充电完毕时间。
27.进一步地,所述第二计算单元包括:
28.判断子单元:用于判断充电完毕时间是否晚于与汽车对应的充电预约请求中的取车时间;若是,则拒绝该充电预约请求;若否,则将工作表单中排序第一的汽车设定为充电目标。
29.进一步地,所述主控设备包括:
30.位置确认单元:用于将多个有源标靶的位置信息以及编码信息发送给控制器,控制器根据表示信息和编码信息确认对应的有源标靶的位置信息。
31.本发明采用上述技术方案包括以下有益效果:
32.本发明根据用户上传的充电预约请求,基于编码标靶定位并驱动移动充电机器人运动至汽车位置进行充电。采用了多个有源标靶定位出作业区域的形状,由于多个有源标靶中的各个有源标靶的表示信息均不相同,当摄像头将拍摄到的有源标靶的表示信息发送给控制器后,控制器可以根据不同的表示信息分辨出不同的有源标靶,从而判断出移动充电机器人在作业区域中的方位。通过将摄像头拍摄到的图片信息发送给控制器,控制器提取图片信息中有源标靶的数据和相关数据,可以判断出移动充电机器人与有源标靶的距
离,准确判断出移动充电机器人在作业区域中的准确位置。从而满足移动充电机器人在复杂动态场景作业时的安全自主导航需求,提高移动充电机器人环境的适应性和智能性。
附图说明
33.图1为本发明实施例一提供的基于编码标靶的移动充电机器人定位方法流程图一;
34.图2为本发明实施例一提供的基于编码标靶的移动充电机器人定位方法流程图二;
35.图3为本发明实施例二提供的基于编码标靶的移动充电机器人定位系统结构图一;
36.图4为本发明实施例二提供的基于编码标靶的移动充电机器人定位系统结构图二。
具体实施方式
37.为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
38.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
39.实施例一
40.本实施例提供了一种基于编码标靶的移动充电机器人定位方法,如图1和图2所示,本方法包括步骤:
41.s1:接收用户上传的充电预约请求;按照接收到充电预约请求的时间将各充电预设请求进行排序并生成工作表单;
42.s2:在沿作业区域的边沿依次设置多个有源标靶,多个有源标靶定位出作业区域的形状,多个有源标靶中的各个有源标靶的表示信息均不相同;
43.s3:通过移动充电机器人的摄像头将拍摄到的图片信息和有源标靶的表示信息传输给控制器,控制器根据表示信息和图片信息控制移动充电机器人运动;
44.s4:驱动移动充电机器人运动至汽车位置,并识别汽车车牌,对汽车进行充电;判断正在充电的汽车的充电电量是否达到下限值;若是,则停止充电并返回充电桩。
45.具体的,通过采用多个有源标靶定位出作业区域的形状,可以判断出移动充电机器人与有源标靶的距离。由于多个有源标靶中的各个有源标靶的表示信息均不相同,当移动充电机器人上的摄像头将拍摄到的有源标靶的表示信息发送给控制器后,控制器可以根据不同的表示信息分辨出不同的有源标靶,从而判断出移动充电机器人在作业区域中的方位。通过将摄像头拍摄到的图片信息发送给控制器,控制器提取图片信息中有源标靶的数据和相关数据,准确判断出移动充电机器人在作业区域中的准确位置。
46.参阅图2,其中,步骤s1包括:
47.s11:根据汽车型号获取汽车充电功率;根据充电功率以及充电电量的下限值计算最少充电时间;
48.s12:根据最少充电时间以及排列顺序计算各汽车的充电完毕时间。
49.具体的,停止充电时,向用户发送汽车电量提示信息。当停止充电时,根据下限值以及预约请求中包括的汽车剩余电量计算充入电量,根据充入电量进行收费,同时,向用户发送汽车电量提示信息。在对汽车进行充电时,会核对预约请求中包括的汽车剩余电量,若汽车剩余电量不准确,则在于用户核对完毕后再进行充电,若无法核对,则放弃充电。
50.其中,步骤s12包括:
51.s121:判断充电完毕时间是否晚于与汽车对应的充电预约请求中的取车时间;若是,则拒绝该充电预约请求;若否,则将工作表单中排序第一的汽车设定为充电目标。
52.具体的,工作表单中存在预约请求a、b、c,当汽车a充电至下限值时,工作表单变化为b、c、a1,当汽车b充电至下限值时,工作表单变化为c、a1、b1,若此时接收到新预约请求d,则工作表单变换为c、d、a1、b1。当工作表单中汽车均充电至下限值时,则对二次排序的汽车进行充电。当所有汽车均充电至下限值时,充电表单变化为a1、b1、c1、d1,提取出排序第一的a1,若是用户a1的取车时间晚于当前时间,则进一步判断当前时间距离对应的取车时间是否小于或等于预设时间,若否,则表明距离取车时间尚且富足,足够将汽车充电至上限值,因为在充电至下限值时就向用户发送电量提示信息,用户可提前取车,为了避免用户早于取车时间取车,向用户发送充电询问信息,若是用户选择继续充电,充电机器人再次对汽车a1充电至上限值,当充电至上限值时,再次向用户发送电量提示信息,并重新计算充电费用,将预约请求a1从工作表单中删除。
53.其中,步骤s3包括:
54.s31:将多个有源标靶的位置信息以及编码信息发送给控制器,控制器根据表示信息和编码信息确认对应的有源标靶的位置信息。
55.具体的,在使用时,将多个有源标靶的位置信息以及编码信息发送给控制器,控制器根据表示信息和编码信息确认对应的有源标靶的位置信息。由于多个有源标靶分别设置在作业区域边沿的不同位置,而且每个有源标靶都具有不同的表示信息,因此将表示信息与有源标靶的编码信息关联起来,当控制器接收到有源标靶的表示信息,就可以根据表示信息与编码信息的关联确认对应的有源标靶,从而得到对应有源标靶的位置信息,以判断判断出移动机器人在作业区域中的方位。
56.本方法根据用户上传的充电预约请求,基于编码标靶定位并驱动移动充电机器人运动至汽车位置进行充电。采用了多个有源标靶定位出作业区域的形状,由于多个有源标靶中的各个有源标靶的表示信息均不相同,当摄像头将拍摄到的有源标靶的表示信息发送给控制器后,控制器可以根据不同的表示信息分辨出不同的有源标靶,从而判断出移动充电机器人在作业区域中的方位。通过将摄像头拍摄到的图片信息发送给控制器,控制器提取图片信息中有源标靶的数据和相关数据,可以判断出移动充电机器人与有源标靶的距离,准确判断出移动充电机器人在作业区域中的准确位置。从而满足移动充电机器人在复杂动态场景作业时的安全自主导航需求,提高移动充电机器人环境的适应性和智能性。
57.实施例二
58.本实施例提供了一种基于编码标靶的移动充电机器人定位系统,如图3和图4所示,本系统包括:
59.排序工作表单生成模块:用于接收用户上传的充电预约请求;按照接收到充电预约请求的时间将各充电预设请求进行排序并生成工作表单;
60.有源标靶设置模块:用于在沿作业区域的边沿依次设置多个有源标靶,多个有源标靶定位出作业区域的形状,多个有源标靶中的各个有源标靶的表示信息均不相同;
61.主控设备:用于通过移动充电机器人的摄像头将拍摄到的图片信息和有源标靶的表示信息传输给控制器,控制器根据表示信息和图片信息控制移动充电机器人运动;
62.驱动识别模块:驱动移动充电机器人运动至汽车位置,并识别汽车车牌,对汽车进行充电;判断正在充电的汽车的充电电量是否达到下限值;若是,则停止充电并返回充电桩。
63.参阅图4,其中,排序工作表单生成模块包括:
64.第一计算单元:用于根据汽车型号获取汽车充电功率;根据充电功率以及充电电量的下限值计算最少充电时间;
65.第二计算单元:用于根据最少充电时间以及排列顺序计算各汽车的充电完毕时间。
66.其中,第二计算单元包括:
67.判断子单元:用于判断充电完毕时间是否晚于与汽车对应的充电预约请求中的取车时间;若是,则拒绝该充电预约请求;若否,则将工作表单中排序第一的汽车设定为充电目标。
68.其中,主控设备包括:
69.位置确认单元:用于将多个有源标靶的位置信息以及编码信息发送给控制器,控制器根据表示信息和编码信息确认对应的有源标靶的位置信息。
70.本系统根据排序工作表单生成模块接收用户上传的充电预约请求,基于编码标靶定位并通过驱动识别模块驱动移动充电机器人运动至汽车位置进行充电。通过有源标靶设置模块将多个有源标靶定位出作业区域的形状,由于多个有源标靶中的各个有源标靶的表示信息均不相同,当摄像头将拍摄到的有源标靶的表示信息发送给主控设备后,主控设备可以根据不同的表示信息分辨出不同的有源标靶,从而判断出移动充电机器人在作业区域中的方位。通过将摄像头拍摄到的图片信息发送给主控设备,主控设备提取图片信息中有源标靶的数据和相关数据,可以判断出移动充电机器人与有源标靶的距离,准确判断出移动充电机器人在作业区域中的准确位置。从而满足移动充电机器人在复杂动态场景作业时的安全自主导航需求,提高移动充电机器人环境的适应性和智能性。
71.虽然本公开披露如上,但本公开的保护范围并非仅限于此。本领域技术人员,在不脱离本公开的精神和范围的前提下,可进行各种变更与修改,这些变更与修改均将落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1