一种电动汽车主动防抖控制方法与流程
1.本发明属于汽车控制技术领域,具体涉及一种电动汽车主动防抖控制方法。
背景技术:
2.随着新能源汽车不断发展,以电机作为动力源的电动化车辆,其整车控制系统的设计通常将整车控制器作为整车转矩判断的核心,通过采集加速踏板、制动踏板、电机转速和车辆挡位等信号,计算和输出驾驶员的需求转矩,即车辆的目标需求转矩,再由电机控制器实现该转矩。在加速踏板和制动踏板切换时,扭矩方向发生变化,扭矩实际值会过零点,扭矩过零点会存在扭矩不可控的问题。减速器与电机机械连接内部会有齿隙,齿隙在变工况时需要靠近前面齿,称靠齿,因此现有是通过标定靠齿扭矩值的大小,该扭矩值是变化的,目的是降低在零点附近的扭矩斜率,如图1所示,平滑过渡此状态。但当扭矩方向变化较快时,进入过零点状态扭矩斜率小,无法响应请求扭矩,驾驶体验差;扭矩斜率大,又会靠齿产生冲击抖动
技术实现要素:
3.本发明的目的就是为了解决上述背景技术存在的不足,提供一种电动汽车主动防抖控制方法。能有效解决因扭矩方向变化产生过大的冲击而引起整车抖动问题。
4.本发明采用的技术方案是:一种电动汽车主动防抖控制方法,采集车辆参数,根据车辆参数确定车辆的目标需求扭矩,当检测到扭矩方向发生变化时,根据目标需求扭矩的大小确定是否采用靠齿扭矩模式控制实际输出扭矩,所述靠齿扭矩模式为:实际输出扭矩大小为靠齿扭矩标定值并维持设定时间。
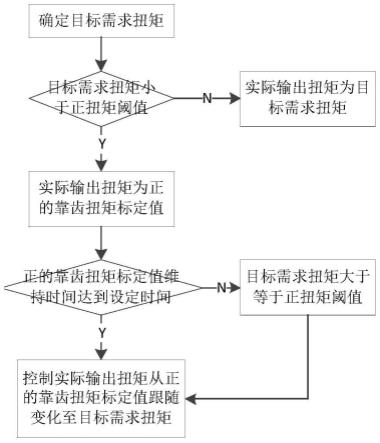
5.进一步地,当扭矩方向从负扭矩变化到正扭矩时,若目标需求扭矩小于正扭矩阈值,则控制实际输出扭矩大小为正的靠齿扭矩标定值,且维持设定时间。
6.进一步地,当实际输出扭矩大小为正的靠齿扭矩标定值且维持时间未达到设定时间时,若目标需求扭矩大于等于正扭矩阈值,则退出靠齿扭矩模式。
7.进一步地,当实际输出扭矩大小为正的靠齿扭矩标定值且在设定时间内目标需求扭矩均小于正扭矩阈值,则在达到设定时间的时刻,退出靠齿扭矩模式。
8.进一步地,当扭矩方向从正扭矩变化到负扭矩时,若目标需求扭矩大于负扭矩阈值,则控制实际输出扭矩大小为负的靠齿扭矩标定值,且维持设定时间。
9.进一步地,当实际输出扭矩大小为负的靠齿扭矩标定值且维持时间未达到设定时间时,若目标需求扭矩小于等于负扭矩阈值,则退出靠齿扭矩模式。
10.进一步地,当实际输出扭矩大小为负的靠齿扭矩标定值且在设定时间内目标需求扭矩均大于负扭矩阈值,则在达到设定时间的时刻,退出靠齿扭矩模式。
11.进一步地,所述退出靠齿扭矩模式是指控制实际输出扭矩从靠齿扭矩标定值跟随变化至目标需求扭矩。
12.进一步地,所述跟随变化是指控制实际输出扭矩按设定步长递增或递减。
13.更进一步地,所述车辆参数包括加速踏板信号、制动踏板信号和电机转速。
14.本发明的有益效果为:
15.本发明在扭矩方向变化时通过靠齿扭矩值大小和作用时间的标定确定实际输出扭矩,能快速解决过零点冲击问题,从而防止整车抖动,方法简单、高效,极大提升了整车驾驶体验性。
附图说明
16.图1为现有技术中标定靠齿扭矩的示意图。
17.图2为本发明扭矩方向从负扭矩变化到正扭矩时的防抖控制流程图。
18.图3为本发明扭矩方向从正扭矩变化到负扭矩时的防抖控制流程图。
19.图4为本发明扭矩变化解决过零点冲击的原理示意图。
具体实施方式
20.下面结合附图对本发明的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以互相结合。
21.本发明提供一种电动汽车主动防抖控制方法,整车控制器采集车辆参数,根据车辆参数确定车辆的目标需求扭矩,当检测到扭矩方向发生变化时,根据目标需求扭矩的大小确定是否采用靠齿扭矩模式控制实际输出扭矩,所述靠齿扭矩模式为:实际输出扭矩大小为靠齿扭矩标定值并维持设定时间。
22.其中,扭矩方向的变化通过整车控制器确定的目标需求扭矩的符号来判定,设定正的目标需求扭矩为te_ref,负的目标需求扭矩-te_ref,实际输出扭矩为te_fbk,正扭矩阈值为tbd1,负扭矩阈值为tbd2,靠齿扭矩标定值为tbd3,靠齿扭矩维持的设定时间为tbd4。tbd1一般为5n.m,tbd2一般为-5n.m,tbd3根据整车整备质量和惯量标定,一般为3n.m或-3n.m,tbd4根据齿隙大小标定,一般为10ms。
23.实施例1
24.如图2所示,为扭矩方向从负扭矩变化到正扭矩时的防抖控制流程图,过程为:通过采集加速踏板、制动踏板和电机转速等信号,计算出车辆的目标需求扭矩,若te_ref<tbd1,则电机控制器控制实际输出扭矩te_fbk为固定不变的正的靠齿扭矩标定值tbd3,且维持设定时间tbd4;若te_ref≥tbd1,则电机控制器控制实际输出扭矩te_fbk为目标需求扭矩te_ref。
25.当上述实际输出扭矩为正的靠齿扭矩标定值且维持时间未达到设定时间tbd4时,若检测到te_ref≥tbd1,则退出靠齿扭矩模式。
26.当上述实际输出扭矩大小为正的靠齿扭矩标定值且在设定时间内目标需求扭矩均小于正扭矩阈值,则在达到设定时间的时刻退出靠齿扭矩模式。
27.所述退出靠齿扭矩模式是指控制实际输出扭矩te_fbk从正的靠齿扭矩标定值tbd3跟随变化至目标需求扭矩te_ref。所述跟随变化是指控制实际输出扭矩按设定步长缓慢递增至目标需求扭矩,设定步长一般为2n.m/ms。
28.实施例2
29.如图3所示,为扭矩方向从正扭矩变化到负扭矩时的防抖控制流程图,过程为:通过采集加速踏板、制动踏板和电机转速等信号,计算出车辆的目标需求扭矩,若-te_ref>tbd2,则电机控制器控制实际输出扭矩te_fbk为固定不变的负的靠齿扭矩标定值tbd3,如-3n.m,且维持设定时间tbd4;若-te_ref≤tbd2,则电机控制器控制实际输出扭矩te_fbk为目标需求扭矩-te_ref。
30.当上述实际输出扭矩为负的靠齿扭矩标定值且维持时间未达到设定时间tbd4时,若检测到-te_ref≤tbd2,则退出靠齿扭矩模式。
31.当上述实际输出扭矩大小为负的靠齿扭矩标定值且在设定时间内目标需求扭矩均大于负扭矩阈值,则在达到设定时间的时刻退出靠齿扭矩模式。
32.所述退出靠齿扭矩模式是指控制实际输出扭矩te_fbk从负的靠齿扭矩标定值tbd3跟随变化至目标需求扭矩-te_ref。所述跟随变化是指控制实际输出扭矩按设定步长缓慢递减至目标需求扭矩,设定步长一般为-2n.m/ms。
33.如图4所示,当从负扭矩变化到正扭矩,确定的目标需求扭矩小于5n.m时,设定靠齿扭矩3n.m,作用时间10ms,此时正好能够使图中齿2能够快速且与前面齿3较小碰撞接触,然后退出过零点状态,扭矩以2n.m/ms的斜率响应vcu请求扭矩,这样在过零点工况时避免了齿隙靠齿碰撞带来的抖动问题;正扭矩变化到负扭矩时是同样的原理。
34.以上仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本领域的技术人员在本发明所揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1