车辆路径调整的制作方法
本公开涉及一种车辆中用于检测路面的系统。
背景技术:
1、计算机可以提供自主或半自主地操作车辆的命令。在第一或主车辆操作的区域中可能存在移动和非移动两者的其他车辆以及其他移动和/或非移动对象(例如,自行车、行人等)。为主车辆规划路径,尤其是考虑到其他移动对象的可能路径时,可能是具有一定挑战性。
技术实现思路
1、本文公开了一种用于检测路面的系统,其包括处理器和存储器。所述存储器存储有指令,所述指令可由所述处理器执行以:基于车身的形状来确定所述车身的虚拟边界;基于车辆传感器数据来识别一个或多个对象;基于所述识别的一个或多个对象、所述确定的虚拟边界以及对推进、转向或制动中的至少一者的输入,确定制动超驰或转向超驰中的至少一者;以及基于所述确定,执行调整车辆转向和车辆速度中的至少一者。
2、所述用于确定所述虚拟边界的指令还可以包括用于进行以下操作的指令:通过指定一个函数来指定所述虚拟边界,所述函数确定从所述虚拟边界内的参考点到所述虚拟边界上的点的虚拟线在所述虚拟线相对于参考线的相应取向上的长度。
3、所述用于确定所述制动超驰或所述转向超驰中的所述至少一者的指令可以包括用于进行以下操作的指令:对控制障碍函数执行优化操作,所述控制障碍函数包括距离函数和所述距离函数的导数,其中所述距离函数是在从所述虚拟边界的参考点延伸到所述一个或多个对象的线的取向上基于所述线从所述一个或多个对象到与所述虚拟边界的交点的长度定义的。
4、所述指令还可以包括用于进行以下操作的指令:基于从所述虚拟边界延伸到所述一个或多个对象的虚拟线的距离的导数和所述虚拟线相对于虚拟参考线的取向的导数来确定所述距离函数的所述导数。
5、所述指令还可以包括用于进行以下操作的指令:进一步基于最大允许减速度来确定所述制动超驰。
6、所述指令还可以包括用于进行以下操作的指令:进一步基于最大允许转向来确定所述转向超驰。
7、可以从车辆操作员或自主车辆控制系统中的至少一者处接收对推进、转向或制动中的至少一者的输入。
8、本文还公开了一种用于检测路面的方法,其包括:基于车身的形状来确定所述车身的虚拟边界;基于车辆传感器数据来识别一个或多个对象;基于所述识别的一个或多个对象、所述确定的虚拟边界以及对推进、转向或制动中的至少一者的输入,确定制动超驰或转向超驰中的至少一者;以及基于所述确定,执行调整车辆转向和车辆速度中的至少一者。
9、确定所述虚拟边界还可以包括通过指定一个函数来指定所述虚拟边界,所述函数确定从所述虚拟边界内的参考点到所述虚拟边界上的点的虚拟线在所述虚拟线相对于参考线的相应取向上的长度。
10、确定所述制动超驰或所述转向超驰中的所述至少一者还可以包括对控制障碍函数执行优化操作,所述控制障碍函数包括距离函数和所述距离函数的导数,其中所述距离函数是在从所述虚拟边界的参考点延伸到所述一个或多个对象的线的取向上基于所述线从所述一个或多个对象到与所述虚拟边界的交点的长度定义的。
11、所述方法还可以包括:基于从所述虚拟边界延伸到所述一个或多个对象的虚拟线的距离的导数和所述虚拟线相对于虚拟参考线的取向的导数来确定所述距离函数的所述导数。
12、所述方法还可以包括:进一步基于最大允许减速度来确定所述制动超驰。
13、所述方法还可以包括:进一步基于最大允许转向来确定所述转向超驰。
14、所述方法还可以包括:从车辆操作员或自主车辆控制系统中的至少一者处接收对推进、转向或制动中的至少一者的输入。
15、还公开了一种计算装置,所述计算装置被编程为执行上述方法步骤中的任一者。
16、还公开了一种计算机程序产品,所述计算机程序产品包括存储有指令的计算机可读介质,所述指令可由计算机处理器执行以执行上述方法步骤中的任一者。
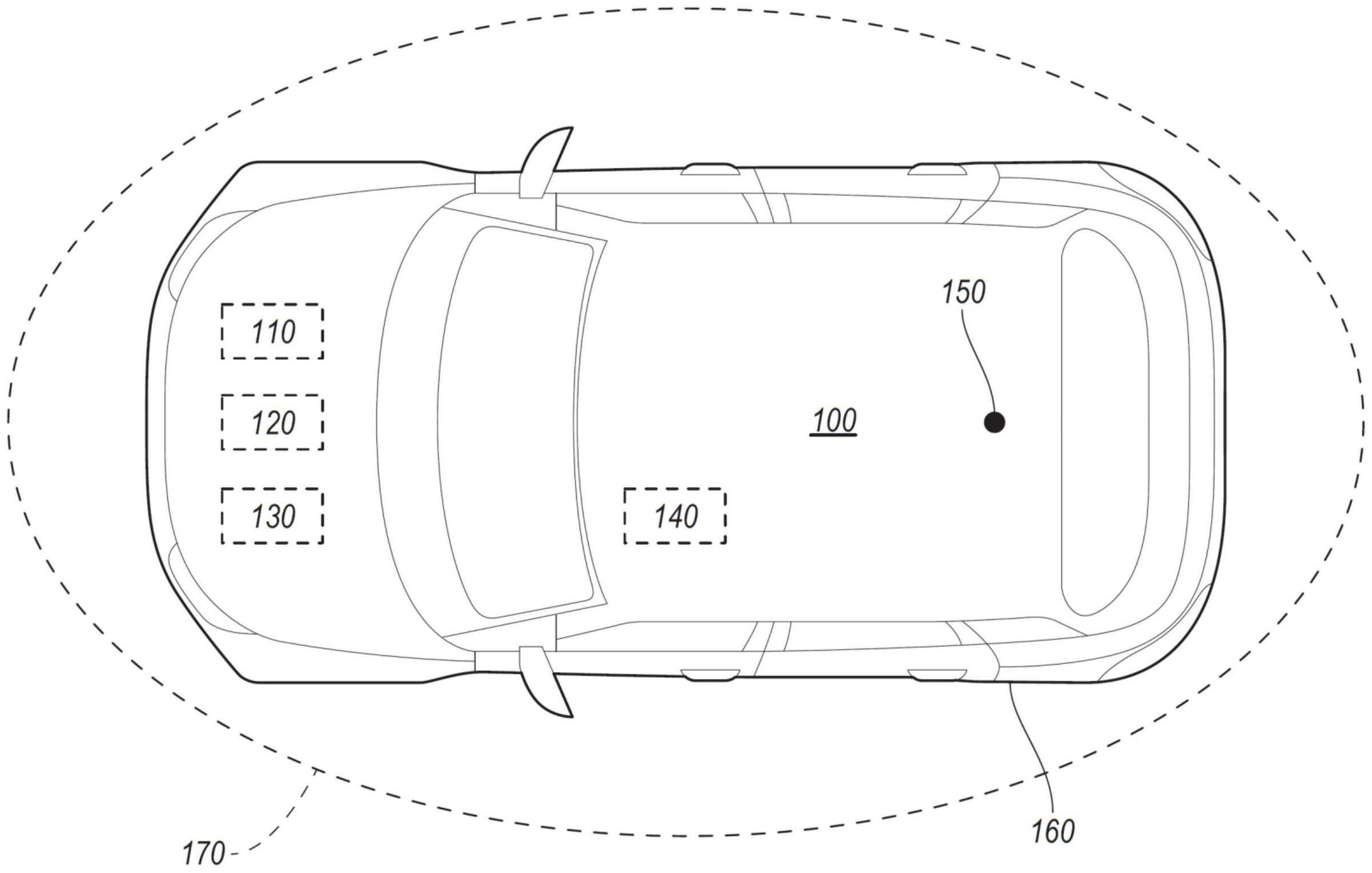
17、车辆可以通过致动车辆推进、制动和/或转向来穿越路径。车辆可以由人类操作员和/或计算机基于各种数据(例如,关于诸如车辆、自行车、行人等的其他对象的存在和/或移动的数据)来操作。为了解决在为车辆规划和/或执行路径时出现的技术挑战,车辆计算装置可以包括编程以便进行以下操作:基于车身的形状来确定所述车身的虚拟边界;基于车辆传感器数据来识别一个或多个对象;并且然后基于所述检测到的一个或多个对象、所述确定的虚拟边界以及对推进、转向或制动中的至少一者的输入,确定制动超驰、加速超驰或转向超驰中的至少一者;以及进一步地,基于所述确定,可以执行调整车辆转向和车辆速度中的至少一者。
技术特征:
1.一种用于检测路面的方法,其包括:
2.如权利要求1所述的方法,其中确定所述虚拟边界还包括通过指定一个函数来指定所述虚拟边界,所述函数确定从所述虚拟边界内的参考点到所述虚拟边界上的点的虚拟线在所述虚拟线相对于参考线的相应取向上的长度。
3.如权利要求1所述的方法,其中确定所述制动超驰或所述转向超驰中的所述至少一者还包括对控制障碍函数执行优化操作,所述控制障碍函数包括距离函数和所述距离函数的导数,其中所述距离函数是在从所述虚拟边界的参考点延伸到所述一个或多个对象的线的取向上基于所述线从所述一个或多个对象到与所述虚拟边界的交点的长度定义的。
4.如权利要求3所述的方法,其还包括:基于从所述虚拟边界延伸到所述一个或多个对象的虚拟线的距离的导数和所述虚拟线相对于虚拟参考线的取向的导数来确定所述距离函数的所述导数。
5.如权利要求1所述的方法,其还包括:进一步基于最大允许减速度来确定所述制动超驰。
6.如权利要求1所述的方法,其还包括:进一步基于最大允许转向来确定所述转向超驰。
7.如权利要求1所述的方法,其还包括:从车辆操作员或自主车辆控制系统中的至少一者处接收对推进、转向或制动中的至少一者的所述输入。
8.一种计算装置,其被编程为执行如权利要求1-7中任一项所述的方法。
9.一种计算机程序产品,其包括存储有指令的计算机可读介质,所述指令能由计算机处理器执行以执行如权利要求1-7中任一项所述的方法。
技术总结
本公开提供“车辆路径调整”。一种用于检测路面的系统包括处理器和存储器。所述存储器存储有指令,所述指令可由所述处理器执行以:基于车身的形状来确定所述车身的虚拟边界;基于车辆传感器数据来识别一个或多个对象;基于所述识别的一个或多个对象、所述确定的虚拟边界以及对推进、转向或制动中的至少一者的输入,确定制动超驰或转向超驰中的至少一者;以及基于所述确定,执行调整车辆转向和车辆速度中的至少一者。
技术研发人员:迈克尔·哈夫纳,M·斯里尼瓦桑,阿布舍克·夏尔马,姆德詹·J·扬科维奇,多根·苏梅尔,亚历山大·杰克尔,亚卡尔·梅赫拉
受保护的技术使用者:福特全球技术公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!