一种基于线控底盘的车辆防侧翻控制系统
1.本发明涉及一种基于线控底盘的车辆防侧翻控制系统。
背景技术:
2.目前,车辆防侧翻控制应用越来越广泛,在高速过弯、规避障碍、急转并道等驾驶场景中,车辆侧翻是一种常见的交通事故,对驾驶员、乘客和行人均会造成严重的伤害。而现有的防侧翻系统往往无法满足存在复杂的路况,也无法对危险进行联合控制,控制方法较为单一,评价因素较为单一,很少能够进行分方向解耦控制车辆防侧翻,导致无法针对上述情况做出及时的措施,安全性不足。因此如何有效保证车辆在不同复杂工况下行驶时实现联合控制工作模式的防侧翻控制,提升车辆的平顺性以及舒适性成为了申请人亟待解决的技术问题。为改善这些问题,本发明提出一种基于线控底盘的车辆防侧翻控制系统。
技术实现要素:
3.本发明的目的在于提供一种基于线控底盘的车辆防侧翻控制系统,以解决上述背景技术中所面临的问题。
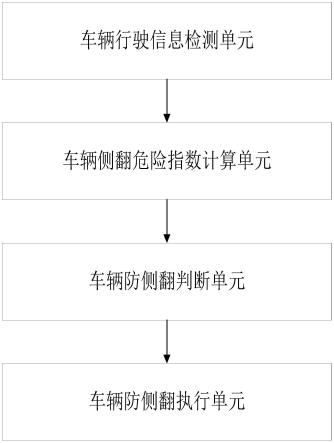
4.为实现上述目的,本发明提供如下技术方案:一种基于线控底盘的车辆防侧翻控制系统:其包括车辆行驶信息检测单元、车辆侧翻危险指数计算单元、车辆防侧翻判断单元、车辆防侧翻执行单元;
5.所述车辆行驶信息检测单元用于获取车辆实时车速、车身侧倾角、侧向加速度、车轮垂向载荷、轮胎侧偏力,建立三自由度车辆模型,列出侧倾运动力矩平衡方程、横摆运动力矩平衡方程和侧向运动力平衡方程;
6.所述车辆侧翻危险指数计算单元用于计算横向载荷转移率ltr、横向载荷偏移系数ltp和横向载荷激转指数ltq,从而得到侧翻危险指数rri;
7.所述车辆防侧翻判断单元用于判断控制防侧翻系统是否执行控制工作,若所述侧翻危险指数|rri|≤0.3,防侧翻控制系统不执行控制工作,若所述侧翻危险指数0.3<|rri|≤0.65,防侧翻控制系统执行单一控制工作模式,若所述侧翻危险指数0.65<|rri|≤1,防侧翻控制系统执行联合控制工作模式,其中单一控制模式仅通过线控底盘中的线控转向系统对车轮转角的角度进行修正控制,联合控制模式采用线控转向系统、线控制动系统和主动悬架系统进行联合控制,由线控转向系统控制的车轮修正角度和线控制动系统控制的车轮制动力可以改变车辆横摆运动力矩,控制方法采用模糊控制,主动悬架控制系统通过控制抗侧倾力矩和减振器阻尼力的大小来改变车辆侧倾运动力矩,根据左右侧减振器阻尼力差异程度因子ζ的大小来评价主动悬架对车辆防侧翻的效果;
8.所述车辆防侧翻执行单元包括线控转向系统、线控制动系统、主动悬架系统,根据所述不同的控制模式来控制不同的系统,单一控制模式仅通过主线控底盘中的线控转向系统对车轮转角的角度进行修正控制,控制方法为比例—积分—微分,联合控制模式采用线控转向系统、线控制动系统和主动悬架系统进行联合控制,由线控转向系统控制的车轮修
正角度和线控制动系统控制的车轮制动力可以改变车辆横摆运动力矩,对车辆各车轮轮胎制动力绝对值的平均值车速v、各车轮转角绝对值的平均值做出控制调整,控制方法采用模糊控制,主动悬架控制系统通过控制抗侧倾力矩和减振器阻尼力的大小来改变车辆侧倾运动力矩,引入阻尼力差异系数λ来表示左右侧减振器阻尼力差异程度因子ζ的大小,根据左右侧减振器阻尼力差异程度因子ζ的大小来评价主动悬架对车辆防侧翻的效果。
9.具体包括以下内容:
10.s1、建立三自由度车辆模型,
11.绕x轴侧倾运动力矩平衡方程:
[0012][0013]
绕z轴横摆运动力矩平衡方程:
[0014][0015]
绕y轴侧向运动力平衡方程:
[0016][0017]
其中,l
x
为侧倾转动惯量,lz为横摆转动惯量,为侧倾角加速度,为侧倾角速度,为车身侧倾角,m为整车质量,ms为簧载质量,hs为侧倾中心到地面的距离,为横摆角加速度,a为质心到前轴的距离,b为质心到后轴的距离,ay为侧向加速度,k为悬架等效侧倾刚度,c为悬架等效侧倾阻尼,f
yf
为前轮侧偏力,f
yr
为后轮侧偏力;
[0018]
s2、所述车辆侧翻危险指数计算单元,根据以下公式可计算横向载荷转移率:
[0019][0020]
其中,f
zl
为左侧车轮垂向载荷,f
zr
为右侧车轮垂向载荷;
[0021]
s3、所述车辆侧翻危险指数计算单元,根据车身侧倾角、侧倾角速度、侧向加速度获得横向载荷偏移系数:
[0022][0023]
其中,l为轮距,k1、k2为加权系数,且k1+k2=1,hr为簧载质量质心到侧倾中心的高度;
[0024]
s4、所述车辆侧翻危险指数计算单元,根据车速、临界车速、不同类型车辆获得横向载荷激转指数:
[0025][0026]
其中,v为车速,v
cr
为临界车速,kh为车辆高度加权系数,其值取决于车辆的类型,当车辆为a级车时,kh=0.85,当车辆为b级车时,kh=0.90,当车辆为c级车时,kh=0.95,当车辆为d级车时,kh=1.0,为车身侧倾角系数,其值取决于车身侧倾角,当车身侧倾角满足时,当车身侧倾角满足时,当车身侧倾角满
足时,ks为车辆损耗系数,其值取决于车辆购买时间系数k
t
、车辆行驶总公里数系数k
x
、每周驾车时间系数k
t
和近三年发生事故数量系数ka,其表达式为:
[0027][0028]
其中,β1、β2、β3、β4为权重系数,且β1+β2+β3+β4=1,当车辆购买时间不足1年时,k
t
=0.1,当车辆购买时间超过1年但不超过3年时,k
t
=0.25,当车辆购买时间超过3年时,k
t
=0.4,当车辆行驶总公里数不足15000km时,k
x
=0.15,当车辆行驶总公里数超过15000km但不超过35000km时,k
x
=0.3,当车辆行驶总公里数超过35000km时,k
x
=0.45,当每周驾车时间不足10小时时,k
t
=0.2,当每周驾车时间超过10小时但不超过15小时时,k
t
=0.3,当每周驾车时间超过15小时时,k
t
=0.4,当近三年发生事故数量不足3件时,ka=0.1,当近三年发生事故数量超过3件但不超过5件时,ka=0.35,当近三年发生事故数量超过5件时,ka=0.6。
[0029]
所述车辆侧翻危险指数计算单元根据横向载荷转移率ltr、横向载荷偏移系数ltp和横向载荷激转指数ltq确定侧翻危险指数rri,其表达式为:
[0030]
rri=α1ltr+α2ltp+α3ltq,-1≤rri≤1,
[0031]
联立所述的s1、s2、s3、s4中的表达式,可得:
[0032][0033]
将其转化为矩阵形式如下:
[0034][0035]
其中,qe为参数权重矩阵,α1、α2、α3为权重因子,其中α1+α2+α3=1。
[0036]
所述车辆防侧翻判断单元根据所述侧翻危险指数的大小来判断防侧翻控制系统的执行控制工作模式,若侧翻危险指数|rri|≤0.3,防侧翻控制系统不执行控制工作,若侧翻危险指数0.3<|rri|≤0.65,防侧翻控制系统执行单一控制工作模式,若侧翻危险指数0.65<|rri|≤1,防侧翻控制系统执行联合控制工作模式;
[0037]
所述单一控制模式为采用线控转向系统控制,线控制动系统和主动悬架系统不启动工作,通过比例—积分—微分控制,适度地控制车轮转角的角度,以防止违背驾驶员的意图,具体内容如下:
[0038]
所述线控转向系统控制是通过减小转向角度以降低横摆角速度和横向加速度,从而降低横向载荷转移率;
[0039]
在稳态转向工况下,横摆角速度增益可表示为:
[0040][0041]
其中,l为轴距,δ为前轮转角,kz为不足转向系数,其大小为:
[0042][0043]
其中,当kz=0时车辆表现为中性转向,当kz<0时车辆表现为过度转向,当kz>0时车辆表现为不足转向,k1为前轮侧偏刚度,k2为后轮侧偏刚度,
[0044]
横摆角速度ω对前轮转角δ输入的稳态响应可表示为:
[0045][0046]
由线控转向系统修正的车轮转角的角度δc引起的横摆角速度变化量为:
[0047][0048]
所述联合控制模式采用线控转向系统、线控制动系统和主动悬架系统进行联合控制,由线控转向系统控制的车轮修正角度和线控制动系统控制的车轮制动力可以改变车辆横摆运动力矩,对车辆各车轮轮胎制动力绝对值的平均值车速v、各车轮转角绝对值的平均值做出控制调整,控制方法采用模糊控制,主动悬架控制系统通过控制抗侧倾力矩和减振器阻尼力的大小来改变车辆侧倾运动力矩,引入阻尼力差异系数λ来表示左右侧减振器阻尼力差异程度因子ζ的大小,根据左右侧减振器阻尼力差异程度因子ζ的大小来评价主动悬架对车辆防侧翻的效果,具体内容如下:
[0049]
所述线控转向系统控制和单一控制模式下的线控转向系统控制方案相同;
[0050]
所述线控制动系统控制是指通过对不同车轮施加不同的制动力,从而给车辆增加一个抗横摆力矩,根据轮胎的附着椭圆特性可知,增大车辆的制动力能够减小车辆的侧偏力,侧偏力与制动力相互影响的公式为:
[0051][0052]
其中,f
xmax
为轮胎最大制动力,f
ymax
为轮胎最大侧偏力,f
x
为轮胎制动力,fy为轮胎侧偏力;
[0053]
最大侧偏力可以认为是轮胎在某一侧偏角下没有制动力时候的侧偏力,而最大制动力由轮胎垂向力和轮胎与道路附着系数决定,公式如下:
[0054]fxmax
=φfz,
[0055]
其中,φ为道路附着系数,fz为轮胎垂向力;
[0056]
采用线控转向系统控制和线控制动系统控制后的车辆横摆运动力矩平衡方程改变为:
[0057][0058]
其中,mb为线控制动产生的抗横摆力矩,其大小为:
[0059][0060]
其中,l为轮距,f
xrf
为前轴右轮轮胎制动力,f
xrr
为后轴右轮轮胎制动力,f
xlf
为前
轴左轮轮胎制动力,f
xlr
为后轴左轮轮胎制动力;
[0061]
根据车辆各车轮轮胎制动力绝对值的平均值的大小和车速v、各车轮转角绝对值的平均值做出调整,表达式如下:
[0062][0063]
的表达式如下:
[0064][0065]
其中,δ
fl
为左前轮转角,δ
fr
为右前轮转角,δ
rl
为左后轮转角,δ
rr
为右后轮转角;
[0066]
所用调整方法采用模糊控制方法,该模糊控制方法输入为车速和各车轮转角绝对值的平均值,车速的模糊集合定义为zx、x、z、d、zd,模糊规则定义如下:zx为车速v满足0≤v≤35km/h,x为车速v满足35<v≤50km/h,z为车速v满足50<v≤70km/h,d为车速v满足70<v≤90km/h,zd为车速v满足v>90km/h;各车轮转角绝对值的平均值的模糊集合定义为zx、x、z、d、zd,模糊规则定义如下:zx为各车轮转角绝对值的平均值满足x为各车轮转角绝对值的平均值满足z为各车轮转角绝对值的平均值满足d为各车轮转角绝对值的平均值满足zd为各车轮转角绝对值的平均值满足
[0067]
该模糊控制方法输出为车辆各车轮轮胎制动力绝对值的平均值模糊集合定义为zx、x、z、d、zd,模糊规则定义如下:zx为车辆各车轮轮胎制动力绝对值的平均值满足x为车辆各车轮轮胎制动力绝对值的平均值满足z为车辆各车轮轮胎制动力绝对值的平均值满足d为车辆各车轮轮胎制动力绝对值的平均值满足zd为车辆各车轮轮胎制动力绝对值的平均值满足
[0068]
所述主动悬架系统控制是指通过对主动悬架中减振器施加不同的阻尼力,从而给车辆增加一个抗侧倾力矩,采用主动悬架控制后的车辆侧倾运动力矩平衡方程改变为:
[0069][0070]
其中,md为主动悬架系统产生的抗侧倾力矩,其大小为:
[0071][0072]
其中,f
zrf
为前悬架右减振器阻尼力,f
zrr
为后悬架右减振器阻尼力,f
zlf
为前悬架左减振器阻尼力,f
zlr
为前悬架右减振器阻尼力;
[0073]
引入左右侧减振器阻尼力差异程度因子ζ用于评价主动悬架对车辆防侧翻控制的程度,其表达式如下:
[0074][0075]
其中,λ为阻尼力差异系数,其大小取决于轮距l,当轮距l不超过1.6m时,λ=0.5,当轮距l超过1.6m但不超过1.8m时,λ=0.65,当轮距l超过1.8m时,λ=0.8;
[0076]
根据左右侧减振器阻尼力差异程度因子ζ的大小对车辆进行相应的调整,调整规则如下:
[0077]
当左右侧减振器阻尼力差异程度因子ζ≤8%时,判断主动悬架系统控制侧翻效果良好,主动悬架控制仍正常执行,减振器阻尼力仍正常输出;当左右侧减振器阻尼力差异程度因子ζ>8%时,判断主动悬架系统控制侧翻效果较差,主动悬架控制暂时正常执行,控制系统持续5s后再次判断ζ是否大于8%,若再次判断ζ>8%,则主动悬架系统控制仍正常执行,减振器阻尼力仍正常输出,若再次判断ζ≤8%,则需要重新调整主动悬架系统的控制和减振器阻尼力。
[0078]
与现有技术相比,本发明的有益效果:
[0079]
1.一种基于线控底盘的车辆防侧翻控制系统根据横向载荷转移率、横向载荷偏移系数和横向载荷激转指数来计算侧翻危险指数,用于评判侧翻的风险。
[0080]
2.本发明的控制模式为单一控制工作模式和联合控制工作模式,其中单一控制模式仅通过线控底盘中的线控转向系统对车轮转角的角度进行修正控制,联合控制模式采用线控转向系统、线控制动系统和主动悬架系统进行联合控制,由线控转向系统控制的车轮修正角度和线控制动系统控制的车轮制动力可以改变车辆横摆运动力矩,主动悬架控制系统通过控制抗侧倾力矩和减振器阻尼力的大小来改变车辆侧倾运动力矩。
[0081]
3.采用模糊控制来控制线控转向系统控制的车轮修正角度和线控制动系统控制的车轮制动力,对于主动悬架控制系统,引入阻尼力差异系数来表示左右侧减振器阻尼力差异程度因子的大小,根据左右侧减振器阻尼力差异程度因子的大小来评价主动悬架对车辆防侧翻的效果。
附图说明
[0082]
下面结合附图对本发明作进一步说明:
[0083]
图1为本发明所提出的一种基于线控底盘的车辆防侧翻控制系统的控制框架图。
具体实施方式
[0084]
下面根据附图及具体实施例,对本发明进一步详细说明。
[0085]
如图1所示,本发明是一种基于线控底盘的车辆防侧翻控制系统:其包括车辆行驶信息检测单元、车辆侧翻危险指数计算单元、车辆防侧翻判断单元、车辆防侧翻执行单元;
[0086]
所述车辆行驶信息检测单元用于获取车辆实时车速、车身侧倾角、侧向加速度、车轮垂向载荷、轮胎侧偏力,建立三自由度车辆模型,列出侧倾运动力矩平衡方程、横摆运动力矩平衡方程和侧向运动力平衡方程;
[0087]
所述车辆侧翻危险指数计算单元用于计算横向载荷转移率ltr、横向载荷偏移系数ltp和横向载荷激转指数ltq,从而得到侧翻危险指数rri;
[0088]
所述车辆防侧翻判断单元用于判断控制防侧翻系统是否执行控制工作,若所述侧翻危险指数|rri|≤0.3,防侧翻控制系统不执行控制工作,若所述侧翻危险指数0.3<|rri|≤0.65,防侧翻控制系统执行单一控制工作模式,若所述侧翻危险指数0.65<|rri|≤1,防侧翻控制系统执行联合控制工作模式,其中单一控制模式仅通过线控底盘中的线控转向系统对车轮转角的角度进行修正控制,联合控制模式采用线控转向系统、线控制动系统和主动悬架系统进行联合控制,由线控转向系统控制的车轮修正角度和线控制动系统控制的车轮制动力可以改变车辆横摆运动力矩,控制方法采用模糊控制,主动悬架控制系统通过控制抗侧倾力矩和减振器阻尼力的大小来改变车辆侧倾运动力矩,根据左右侧减振器阻尼力差异程度因子ζ的大小来评价主动悬架对车辆防侧翻的效果;
[0089]
所述车辆防侧翻执行单元包括线控转向系统、线控制动系统、主动悬架系统,根据所述不同的控制模式来控制不同的系统,单一控制模式仅通过主线控底盘中的线控转向系统对车轮转角的角度进行修正控制,控制方法为比例—积分—微分,联合控制模式采用线控转向系统、线控制动系统和主动悬架系统进行联合控制,由线控转向系统控制的车轮修正角度和线控制动系统控制的车轮制动力可以改变车辆横摆运动力矩,对车辆各车轮轮胎制动力绝对值的平均值车速v、各车轮转角绝对值的平均值做出控制调整,控制方法采用模糊控制,主动悬架控制系统通过控制抗侧倾力矩和减振器阻尼力的大小来改变车辆侧倾运动力矩,引入阻尼力差异系数λ来表示左右侧减振器阻尼力差异程度因子ζ的大小,根据左右侧减振器阻尼力差异程度因子ζ的大小来评价主动悬架对车辆防侧翻的效果。
[0090]
具体包括以下内容:
[0091]
s1、建立三自由度车辆模型,
[0092]
绕x轴侧倾运动力矩平衡方程:
[0093][0094]
绕z轴横摆运动力矩平衡方程:
[0095][0096]
绕y轴侧向运动力平衡方程:
[0097][0098]
其中,l
x
为侧倾转动惯量,lz为横摆转动惯量,为侧倾角加速度,为侧倾角速度,为车身侧倾角,m为整车质量,ms为簧载质量,hs为侧倾中心到地面的距离,为横摆角加速度,a为质心到前轴的距离,b为质心到后轴的距离,ay为侧向加速度,k为悬架等效侧倾刚度,c为悬架等效侧倾阻尼,f
yf
为前轮侧偏力,f
yr
为后轮侧偏力;
[0099]
s2、所述车辆侧翻危险指数计算单元,根据以下公式可计算横向载荷转移率:
[0100][0101]
其中,f
zl
为左侧车轮垂向载荷,f
zr
为右侧车轮垂向载荷;
[0102]
s3、所述车辆侧翻危险指数计算单元,根据车身侧倾角、侧倾角速度、侧向加速度获得横向载荷偏移系数:
[0103][0104]
其中,l为轮距,k1、k2为加权系数,且k1+k2=1,hr为簧载质量质心到侧倾中心的高度;
[0105]
s4、所述车辆侧翻危险指数计算单元,根据车速、临界车速、不同类型车辆获得横向载荷激转指数:
[0106][0107]
其中,v为车速,v
cr
为临界车速,kh为车辆高度加权系数,其值取决于车辆的类型,当车辆为a级车时,kh=0.85,当车辆为b级车时,kh=0.90,当车辆为c级车时,kh=0.95,当车辆为d级车时,kh=1.0,为车身侧倾角系数,其值取决于车身侧倾角,当车身侧倾角满足时,当车身侧倾角满足时,当车身侧倾角满足时,ks为车辆损耗系数,其值取决于车辆购买时间系数k
t
、车辆行驶总公里数系数k
x
、每周驾车时间系数k
t
和近三年发生事故数量系数ka,其表达式为:
[0108][0109]
其中,β1、β2、β3、β4为权重系数,且β1+β2+β3+β4=1,当车辆购买时间不足1年时,k
t
=0.1,当车辆购买时间超过1年但不超过3年时,k
t
=0.25,当车辆购买时间超过3年时,k
t
=0.4,当车辆行驶总公里数不足15000km时,k
x
=0.15,当车辆行驶总公里数超过15000km但不超过35000km时,k
x
=0.3,当车辆行驶总公里数超过35000km时,k
x
=0.45,当每周驾车时间不足10小时时,k
t
=0.2,当每周驾车时间超过10小时但不超过15小时时,k
t
=0.3,当每周驾车时间超过15小时时,k
t
=0.4,当近三年发生事故数量不足3件时,ka=0.1,当近三年发生事故数量超过3件但不超过5件时,ka=0.35,当近三年发生事故数量超过5件时,ka=0.6。
[0110]
所述车辆侧翻危险指数计算单元根据横向载荷转移率ltr、横向载荷偏移系数ltp和横向载荷激转指数ltq确定侧翻危险指数rri,其表达式为:
[0111]
rri=α1ltr+α2ltp+α3ltq,-1≤rri≤1,
[0112]
联立所述的s1、s2、s3、s4中的表达式,可得:
[0113][0114]
将其转化为矩阵形式如下:
[0115][0116]
其中,qe为参数权重矩阵,α1、α2、α3为权重因子,其中α1+α2+α3=1。
[0117]
所述车辆防侧翻判断单元根据所述侧翻危险指数的大小来判断防侧翻控制系统的执行控制工作模式,若侧翻危险指数|rri|≤0.3,防侧翻控制系统不执行控制工作,若侧翻危险指数0.3<|rri|≤0.65,防侧翻控制系统执行单一控制工作模式,若侧翻危险指数0.65<|rri|≤1,防侧翻控制系统执行联合控制工作模式;
[0118]
所述单一控制模式为采用线控转向系统控制,线控制动系统和主动悬架系统不启动工作,通过比例—积分—微分控制,适度地控制车轮转角的角度,以防止违背驾驶员的意图,具体内容如下:
[0119]
所述线控转向系统控制是通过减小转向角度以降低横摆角速度和横向加速度,从而降低横向载荷转移率;
[0120]
在稳态转向工况下,横摆角速度增益可表示为:
[0121][0122]
其中,l为轴距,δ为前轮转角,kz为不足转向系数,其大小为:
[0123][0124]
其中,当kz=0时车辆表现为中性转向,当kz<0时车辆表现为过度转向,当kz>0时车辆表现为不足转向,k1为前轮侧偏刚度,k2为后轮侧偏刚度,
[0125]
横摆角速度ω对前轮转角δ输入的稳态响应可表示为:
[0126][0127]
由线控转向系统修正的车轮转角的角度δc引起的横摆角速度变化量为:
[0128][0129]
所述联合控制模式采用线控转向系统、线控制动系统和主动悬架系统进行联合控制,由线控转向系统控制的车轮修正角度和线控制动系统控制的车轮制动力可以改变车辆横摆运动力矩,对车辆各车轮轮胎制动力绝对值的平均值车速v、各车轮转角绝对值的平均值做出控制调整,控制方法采用模糊控制,主动悬架控制系统通过控制抗侧倾力矩和减振器阻尼力的大小来改变车辆侧倾运动力矩,引入阻尼力差异系数λ来表示左右侧减振器阻尼力差异程度因子ζ的大小,根据左右侧减振器阻尼力差异程度因子ζ的大小来评价主动悬架对车辆防侧翻的效果,具体内容如下:
[0130]
所述线控转向系统控制和单一控制模式下的线控转向系统控制方案相同;
[0131]
所述线控制动系统控制是指通过对不同车轮施加不同的制动力,从而给车辆增加一个抗横摆力矩,根据轮胎的附着椭圆特性可知,增大车辆的制动力能够减小车辆的侧偏力,侧偏力与制动力相互影响的公式为:
[0132]
[0133]
其中,f
xmax
为轮胎最大制动力,f
ymax
为轮胎最大侧偏力,f
x
为轮胎制动力,fy为轮胎侧偏力;
[0134]
最大侧偏力可以认为是轮胎在某一侧偏角下没有制动力时候的侧偏力,而最大制动力由轮胎垂向力和轮胎与道路附着系数决定,公式如下:
[0135]fxmax
=φfz,
[0136]
其中,φ为道路附着系数,fz为轮胎垂向力;
[0137]
采用线控转向系统控制和线控制动系统控制后的车辆横摆运动力矩平衡方程改变为:
[0138][0139]
其中,mb为线控制动产生的抗横摆力矩,其大小为:
[0140][0141]
其中,l为轮距,f
xrf
为前轴右轮轮胎制动力,f
xrr
为后轴右轮轮胎制动力,f
xlf
为前轴左轮轮胎制动力,f
xlr
为后轴左轮轮胎制动力;
[0142]
根据车辆各车轮轮胎制动力绝对值的平均值的大小和车速v、各车轮转角绝对值的平均值做出调整,表达式如下:
[0143][0144]
的表达式如下:
[0145][0146]
其中,δ
fl
为左前轮转角,δ
fr
为右前轮转角,δ
rl
为左后轮转角,δ
rr
为右后轮转角;
[0147]
所用调整方法采用模糊控制方法,该模糊控制方法输入为车速和各车轮转角绝对值的平均值,车速的模糊集合定义为zx、x、z、d、zd,模糊规则定义如下:zx为车速v满足0≤v≤35km/h,x为车速v满足35<v≤50km/h,z为车速v满足50<v≤70km/h,d为车速v满足70<v≤90km/h,zd为车速v满足v>90km/h;各车轮转角绝对值的平均值的模糊集合定义为zx、x、z、d、zd,模糊规则定义如下:zx为各车轮转角绝对值的平均值满足x为各车轮转角绝对值的平均值满足z为各车轮转角绝对值的平均值满足d为各车轮转角绝对值的平均值满足zd为各车轮转角绝对值的平均值满足
[0148]
该模糊控制方法输出为车辆各车轮轮胎制动力绝对值的平均值模糊集合定义为zx、x、z、d、zd,模糊规则定义如下:zx为车辆各车轮轮胎制动力绝对值的平均值满足x为车辆各车轮轮胎制动力绝对值的平均值满足z为车辆各车轮轮胎制动力绝对值的平均值满足d为车辆各车轮轮胎制动
力绝对值的平均值满足zd为车辆各车轮轮胎制动力绝对值的平均值满足
[0149]
所述主动悬架系统控制是指通过对主动悬架中减振器施加不同的阻尼力,从而给车辆增加一个抗侧倾力矩,采用主动悬架控制后的车辆侧倾运动力矩平衡方程改变为:
[0150][0151]
其中,md为主动悬架系统产生的抗侧倾力矩,其大小为:
[0152][0153]
其中,f
zrf
为前悬架右减振器阻尼力,f
zrr
为后悬架右减振器阻尼力,f
zlf
为前悬架左减振器阻尼力,f
zlr
为前悬架右减振器阻尼力;
[0154]
引入左右侧减振器阻尼力差异程度因子ζ用于评价主动悬架对车辆防侧翻控制的程度,其表达式如下:
[0155][0156]
其中,λ为阻尼力差异系数,其大小取决于轮距l,当轮距l不超过1.6m时,λ=0.5,当轮距l超过1.6m但不超过1.8m时,λ=0.65,当轮距l超过1.8m时,λ=0.8;
[0157]
根据左右侧减振器阻尼力差异程度因子ζ的大小对车辆进行相应的调整,调整规则如下:
[0158]
当左右侧减振器阻尼力差异程度因子ζ≤8%时,判断主动悬架系统控制侧翻效果良好,主动悬架控制仍正常执行,减振器阻尼力仍正常输出;当左右侧减振器阻尼力差异程度因子ζ>8%时,判断主动悬架系统控制侧翻效果较差,主动悬架控制暂时正常执行,控制系统持续5s后再次判断ζ是否大于8%,若再次判断ζ>8%,则主动悬架系统控制仍正常执行,减振器阻尼力仍正常输出,若再次判断ζ≤8%,则需要重新调整主动悬架系统的控制和减振器阻尼力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1