车辆及控制车辆的方法与流程
本发明涉及车辆及控制车辆的方法,更具体地,本发明涉及配置为利用传感器融合来避免碰撞的车辆及控制车辆的方法。
背景技术:
1、车辆配备有高级驾驶员辅助系统(advanced driver assistance system,adas),以防止在道路上行驶时与其他车辆发生各种碰撞。
2、实施高级驾驶员辅助系统的前提是识别包括物体在内的外部环境,这是通过各种传感器(例如,摄像机、雷达和激光雷达(light detection and ranging,lidar))的组合实现的。这被称为传感器融合。
3、当行驶过程中某些传感器发生故障时,引起识别暂时变差,车辆可能无法应对突然碰撞的风险。
4、包括在本发明的背景技术中的信息仅用于增强对本发明的一般背景的理解,而不能被视为承认或任何形式的暗示该信息形成本领域技术人员已知的现有技术。
技术实现思路
1、本发明的各个方面致力于提供一种车辆及控制车辆的方法,其配置为即使在摄像机的识别变差的情况下也能进行避让控制。
2、本发明的其他方面将部分地在下面的描述中阐述,并且将部分地从描述中显而易见,或者可以通过本发明的实践来了解。
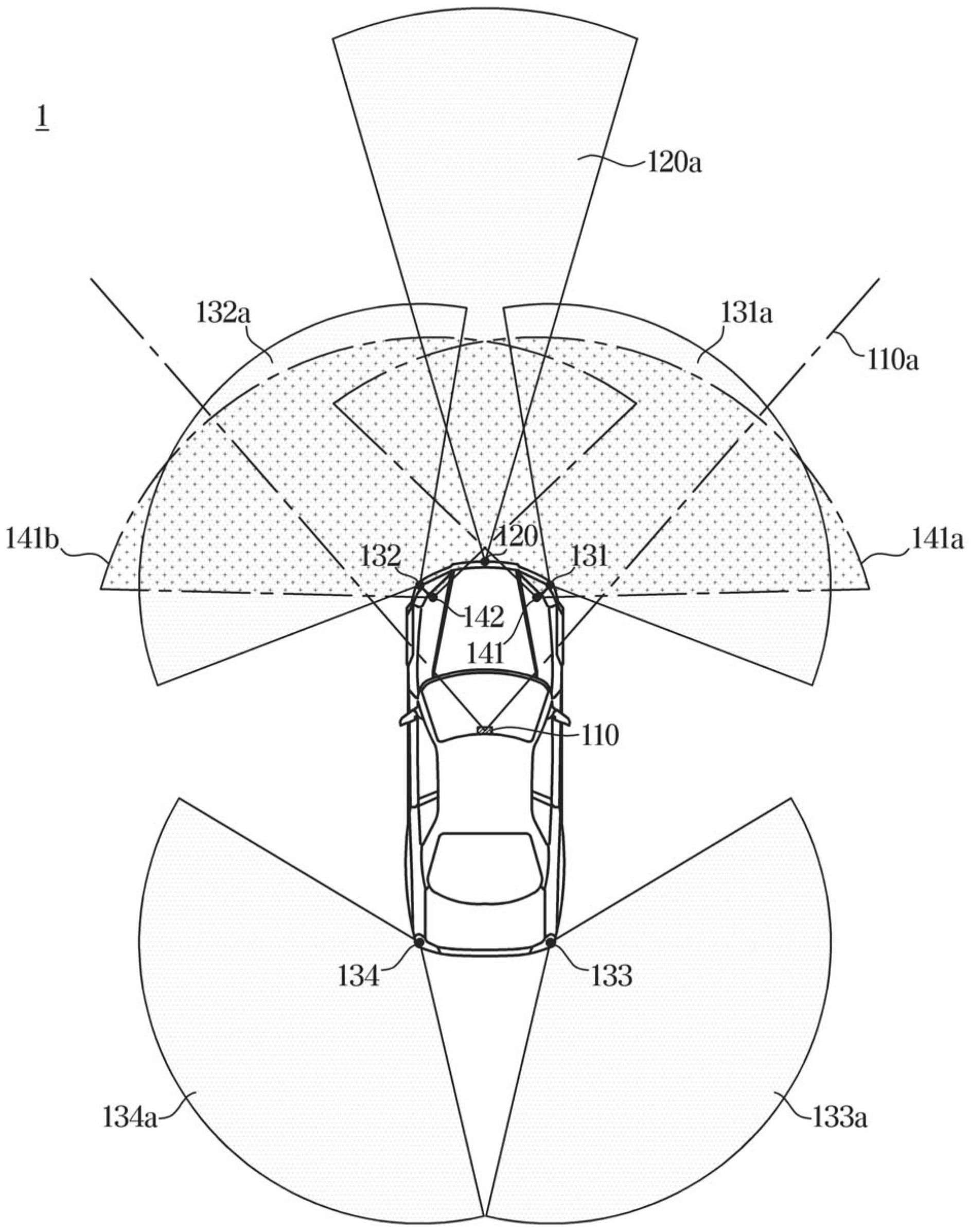
3、根据本发明的一个方面,一种车辆包括:前部摄像机、前部雷达、角部雷达、角部lidar以及控制器,所述前部摄像机设置于车辆并具有车辆的前方视野,以获得用于检测前方视野中的物体的图像数据;所述前部雷达设置于车辆并具有车辆的前方视野,以获得用于检测前方视野中的物体的雷达数据;所述角部雷达设置于车辆并具有车辆的侧前方视野,以获得用于检测侧前方视野中的物体的雷达数据;所述角部lidar设置于车辆并具有车辆的侧前方视野,以获得用于检测侧前方视野中的物体的激光雷达数据;所述控制器配置为通过处理图像数据和雷达数据来生成第一融合模式,或者通过处理雷达数据和lidar数据来生成第二融合模式;其中所述控制器配置为在基于第一融合模式执行车辆的避让控制的时候,当控制器检测到前部摄像机的异常时,将第一融合模式改变为第二融合模式,并且在预定时间段内基于第二融合模式执行避让控制。
4、控制器可以获得第一融合模式的可靠性,并且当第一融合模式的可靠性小于或等于阈值时,确定出前部摄像机发生异常。
5、控制器可以配置为基于前部摄像机的外部照度的变化来确定第一融合模式的可靠性。
6、控制器可以在车辆进入隧道时检测外部照度的变化,并且基于外部照度的变化来确定第一融合模式的可靠性。
7、控制器可以基于多个外部光源检测外部照度的变化,并且基于外部照度的变化来确定第一融合模式的可靠性。
8、控制器可以基于外部天气检测前方视野的变化,并且基于前方视野确定第一融合模式的可靠性。
9、控制器可以在预定时间段内获得第一融合模式的可靠性,并且当第一融合模式的可靠性在预定时间段内超过阈值时,将第二融合模式改变为第一融合模式。
10、控制器可以在预定时间段内获得第一融合模式的可靠性,并且当第一融合模式的可靠性在预定时间段内小于或等于阈值时,生成系统警告。
11、车辆可以进一步包括:开关,其设置为使得控制器可选择性地连接到开关的第一端子和第二端子的任意一者;其中所述第一端子可以将前部摄像机和前部雷达的每个、或者前部摄像机和角部雷达的每个电连接到控制器;所述第二端子可以将角部lidar和前部雷达的每个、或者角部lidar和角部雷达的每个电连接到控制器。
12、控制器可以连接到第一端子以生成第一融合模式,可以连接到第二端子以生成第二融合模式。
13、根据本发明的一个方面,一种控制车辆的方法包括:通过处理图像数据和雷达数据来生成第一融合模式;通过处理雷达数据和lidar数据来生成第二融合模式;在基于第一融合模式执行避让控制的时候,当检测到前部摄像机的异常时,将第一融合模式改变为第二融合模式;在预定时间段内基于第二融合模式执行避让控制。
14、将第一融合模式改变为第二融合模式可以包括:获得第一融合模式的可靠性,并且当第一融合模式的可靠性小于或等于阈值时,推断出前部摄像机发生异常。
15、确定出摄像机发生异常可以包括:基于前部摄像机的外部照度的变化来确定第一融合模式的可靠性。
16、确定出摄像机发生异常可以包括:当车辆进入隧道时检测外部照度的变化,并且基于外部照度的变化来确定第一融合模式的可靠性。
17、确定出摄像机发生异常可以包括:基于多个外部光源检测外部照度的变化,并且基于外部照度的变化来确定第一融合模式的可靠性。
18、确定出摄像机发生异常可以包括:基于外部天气检测前方视野的变化,并且基于前方视野确定第一融合模式的可靠性。
19、控制方法可以进一步包括:在预定时间段内获得第一融合模式的可靠性,并且当第一融合模式的可靠性在预定时间段内超过阈值时,将第二融合模式改变为第一融合模式。
20、控制方法可以进一步包括:在预定时间段内获得第一融合模式的可靠性,并且当第一融合模式的可靠性在预定时段内小于或等于阈值时,生成系统警告。
21、本发明的方法和设备具有其它的特性和优点,这些特性和优点从并入本文中的附图和随后的具体实施方式中将是显而易见的,或者将在并入本文中的附图和随后的具体实施方式中进行详细陈述,这些附图和具体实施方式共同用于解释本发明的特定原理。
技术特征:
1.一种车辆,其包括:
2.根据权利要求1所述的车辆,其中,所述控制器配置为:获得第一融合模式的可靠性,并且当第一融合模式的可靠性小于或等于阈值时,推断出前部摄像机已发生异常。
3.根据权利要求2所述的车辆,其中,所述控制器配置为:基于前部摄像机的外部照度的变化来确定第一融合模式的可靠性。
4.根据权利要求3所述的车辆,其中,所述控制器配置为:当车辆进入隧道时检测外部照度的变化,并且基于外部照度的变化来确定第一融合模式的可靠性。
5.根据权利要求3所述的车辆,其中,所述控制器配置为:基于多个外部光源检测外部照度的变化,并且基于外部照度的变化来确定第一融合模式的可靠性。
6.根据权利要求3所述的车辆,其中,所述控制器配置为:基于外部天气检测前方视野的变化,并且基于前方视野确定第一融合模式的可靠性。
7.根据权利要求2所述的车辆,其中,所述控制器配置为:在预定时间段内获得第一融合模式的可靠性,并且当第一融合模式的可靠性在预定时间段内超过阈值时,将第二融合模式改变为第一融合模式。
8.根据权利要求2所述的车辆,其中,所述控制器配置为:在预定时间段内获得第一融合模式的可靠性,并且当第一融合模式的可靠性在预定时间段内小于或等于阈值时,生成系统警告。
9.根据权利要求1所述的车辆,其进一步包括:
10.根据权利要求9所述的车辆,其中,所述控制器连接到第一端子以生成第一融合模式,所述控制器连接到第二端子以生成第二融合模式。
11.根据权利要求1所述的车辆,其中,所述控制器配置为:确定与物体发生碰撞的风险,并且当控制器推断出车辆存在碰撞的可能性时,所述控制器配置为检测前部摄像机的异常。
12.一种控制车辆的方法,所述方法包括:
13.根据权利要求12所述的方法,其中,将第一融合模式改变为第二融合模式包括:获得第一融合模式的可靠性,并且当第一融合模式的可靠性小于或等于阈值时,推断出前部摄像机发生异常。
14.根据权利要求13所述的方法,其中,推断出前部摄像机发生异常包括:基于前部摄像机的外部照度的变化来确定第一融合模式的可靠性。
15.根据权利要求14所述的方法,其中,推断出前部摄像机发生异常包括:当车辆进入隧道时检测外部照度的变化,并且基于外部照度的变化来确定第一融合模式的可靠性。
16.根据权利要求14所述的方法,其中,推断出前部摄像机发生异常包括:基于多个外部光源检测外部照度的变化,并且基于外部照度的变化来确定第一融合模式的可靠性。
17.根据权利要求14所述的方法,其中,推断出前部摄像机发生异常包括:基于外部天气检测前方视野的变化,并且基于前方视野确定第一融合模式的可靠性。
18.根据权利要求13所述的方法,其进一步包括:
19.根据权利要求13所述的方法,其进一步包括:
20.根据权利要求12所述的方法,其中,所述控制器配置为:确定与物体发生碰撞的风险,并且当控制器推断出车辆存在碰撞的可能性时,所述控制器配置为检测前部摄像机的异常。
技术总结
本发明涉及车辆及控制车辆的方法。车辆包括:前部摄像机、前部雷达、角部雷达、角部LiDAR以及控制器,所述控制器配置为:通过处理图像数据和雷达数据来生成第一融合模式,或者通过处理雷达数据和LiDAR数据来生成第二融合模式;其中所述控制器在基于第一融合模式执行车辆的避让控制的时候,当控制器检测到前部摄像机的异常时,将第一融合模式改变为第二融合模式,并且在预定时间段内基于第二融合模式执行避让控制。
技术研发人员:成东炫,全大奭,权容奭,安泰根,魏炯钟,李俊昊,金应瑞,李相敏
受保护的技术使用者:现代自动车株式会社
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!