一种用于风电塔筒爬行装置的多维安全控制装置及控制方法
1.本发明涉及设备安全维护技术领域,并具体涉及一种用于风电塔筒爬行装置的多维安全控制装置及控制方法。
背景技术:
2.风力发电机装置各部件需要定期地进行检修与维护,尤其是叶片轴承等在高空工作的部件。为减少人工高空作业,出现了许多用机器人代替人工为风力发电机进行检修各部件的装置。为使这类机器人装置能够全面完整地对风力发电机部件检修维护,设计爬行装置与其连接,使得其能在塔筒上自由地上下爬行。在这类爬行装置运作时,爬行装置的爬行系统存在受自然天气侵蚀损害,结冰打滑,冻雨冰雹损害及其他极端情况的影响,其爬行的动力系统与压力系统存在故障风险。为避免爬行装置在上下爬行过程中的出现故障,其自身的稳定性与安全性也需要被保障,使得其可以正常运作。
3.目前现有技术中对塔筒或柱形外部自动攀爬机器人没有考虑到攀爬机器人发生故障状况下采取紧急措施以及预防控制措施,诸如:当攀爬机器人电源,动力系统,压力系统,或者张紧皮带出现故障时,攀爬机器人可能会对塔筒或柱形建筑物造成损伤,更有可能造成自身坠落,从而导致附在攀爬机器人上的喷涂装置或其他装置一并受到损害,安全性不能得到有效的保障。因此如何设计一种针对塔筒爬行装置的多维安全控制装置及控制方法称为本领域亟待解决的技术问题。
技术实现要素:
4.本发明针对现有技术存在的不足,提供一种针对塔筒爬行装置的多维安全控制装置及控制方法,用以解决现有技术中的塔筒爬行装置安全性不高的技术问题。
5.本发明解决上述技术问题的技术方案如下:
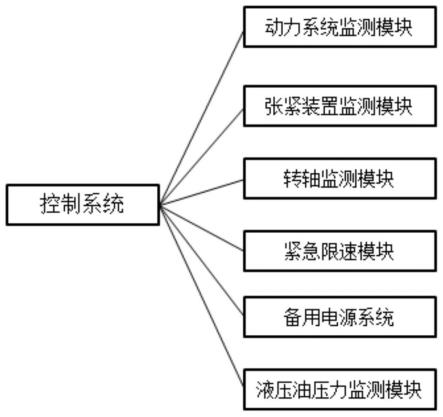
6.一种用于风电塔筒爬行装置的多维安全控制装置,其特征在于:包括
7.动力系统监测模块,用于监测所述塔筒爬行装置的动力系统的运行状态;
8.张紧装置监测模块,用于监测所述塔筒爬行装置的张紧皮带的运行状态;
9.转轴监测模块,所述转轴监测模块包括设置在所述张紧皮带转轴上的力矩传感器、转速传感器和温度传感器,分别用于监测所述塔筒爬行装置的转轴力矩、转轴转速和温度;
10.控制模块,所述控制模块接收来自所述动力系统监测模块、张紧装置监测模块和转轴监测模块的监测信息,进行故障分析判断后控制所述塔筒爬行装置动作。
11.进一步的,在所述塔筒爬行装置的张紧皮带上铺设有导线,所述张紧装置监测模块与所述导线电连接。
12.进一步的,还包括紧急限速模块,所述紧急限速模块包括拉力限制器和紧急安全带,所述拉力限制器设置于所述紧急安全带两侧。
13.进一步的,还包括备用电源系统,用于在所述塔筒爬行装置的常规电源系统出现
故障时提供备用电力。
14.进一步的,还包括液压油压力监测模块,用于监测所述塔筒爬行装置的液压系统的压力。
15.本发明另一方面提供一种用于风电塔筒爬行装置的多维安全控制方法,采用所述的多维安全控制装置,其特征在于:
16.所述控制模块实时接收来自所述张紧装置监测模块的监测信息,若所述张紧装置监测模块的信号正常,所述控制模块不动作;
17.若所述张紧装置监测模块的信号断开,则判断所述塔筒爬行装置的工作状态,
18.若所述塔筒爬行装置处于停机状态,则切断所述塔筒爬行装置的电源系统;
19.若所述塔筒爬行装置处于工作状态,则向所述塔筒爬行装置的履带爬行机发出指令,控制所述塔筒爬行装置下降至塔筒底端。
20.进一步的,所述控制模块实时接收来自所述转轴监测模块的监测信息,若所述转轴力矩大于正常力矩范围且转速为零,则判断为卡死状态,则所述控制模块发出警报;
21.若所述转轴力矩小于正常力矩范围且转速不为零,则判断为打滑状态,则所述控制模块发出控制信号,使转轴缓慢停止旋转,并适当反向旋转,并监测张紧皮带是否舒张,若能够舒张,则再次正转;
22.继续判断是否为打滑状态,若判断不为打滑状态,则所述塔筒爬行装置继续正常作业,若判断为打滑状态,则控制所述张紧皮带缓慢舒张,使所述塔筒爬行装置下降至塔筒底端。
23.进一步的,所述控制模块实时接收来自所述转轴监测模块的监测信息,若所述转轴的温度大于等于容许温度的1.1倍而小于等于1.25倍,则判断为过热,发出控制指令控制所述转轴停止工作,若所述转轴的温度恢复正常,则发出控制指令控制所述转轴继续工作;
24.若所述转轴的温度大于容许温度的1.25倍,则判断为短路,发出控制指令控制所述张紧皮带缓慢舒张,使所述塔筒爬行装置下降至塔筒底端。
25.进一步的,所述控制模块实时接收来自动力系统监测模块的监测信息,若监测到所述动力系统损坏或故障,则控制张紧皮带的轴轮旋转使得张紧皮带缩紧并卡死,并持续对张紧皮带施加压力,以保持张紧皮带锁紧。
26.进一步的,所述控制模块实时监测所述塔筒爬行装置的高度信息,当判断所述塔筒爬行装置下落速度超出正常范围时,控制所述紧急限速模块,启动紧急安全带的预收紧装置和拉力限制器,使得紧急安全带瞬时缩紧并卡死。
27.本发明的有益效果是:
28.通过设置动力系统监测模块、张紧装置监测模块、转轴监测模、紧急限速模块、备用电源系统和液压油压力监测模块,可实时监测所述塔筒爬行装置的运行状态,当发生异常时,所述控制模块进行故障分析判断后,可针对不同的故障或异常类型,控制所述塔筒爬行装置实施相应的动作,从而保障所述塔筒爬行装置的安全。
附图说明
29.图1为本发明实施例的塔筒爬行装置结构示意图;
30.图2为本发明实施例的液压结构示意图;
31.图3为本发明实施例的紧急限速模块结构示意图;
32.图4为本发明实施例的张紧装置监测模块结构示意图;
33.图5为本发明实施例的控制装置组成示意图;
34.图6为本发明实施例的控制方法示意图;
35.图7为本发明实施例的控制方法示意图;
36.图8为本发明实施例的控制方法示意图。
37.图中1-履带爬行机,2-张紧皮带,21-细丝导线,3-张紧皮带转轴,4-液压臂,5-液压油箱,6-液压臂伸缩杆,7-紧急安全带,8-拉力限制器。
具体实施方式
38.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
39.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
40.参见附图1,现有技术中的塔筒爬行装置一般包括沿液压臂4内侧设置的多组履带爬行机1,每组履带爬行机1有两条履带,履带内部设置有三个爬行轮,履带爬行机1可沿着塔筒外轮廓面移动;张紧皮带2,用于将塔筒爬行装置捆绑在塔筒上;张紧皮带转轴3,装置下坠时,电脉冲传递信息至张紧皮带转轴3,张紧皮带转轴3旋转绷紧张紧皮带2;液压油箱5,储存保证液压系统工作所需的油液的容器,内部设有压力传感器;液压臂伸缩杆6,用于调节液压臂弯曲程度,使更好与塔筒契合。
41.参见附图2-4,本发明在液压臂4上设置一段紧急安全带7,采用铝型材铝合金,可随装置上下移动时收缩和伸长;在紧急安全带7的两端设置有拉力限制器8,在塔筒爬行装置快速坠落10秒后打开,固定紧急安全带7的长度。
42.参见附图5-8,本发明的一种用于风电塔筒爬行装置的多维安全控制装置,其特征在于:包括:
43.动力系统监测模块,用于监测所述塔筒爬行装置的动力系统的运行状态;
44.张紧装置监测模块,用于监测所述塔筒爬行装置的张紧皮带的运行状态;
45.转轴监测模块,所述转轴监测模块包括设置在所述张紧皮带转轴上的力矩传感器、转速传感器和温度传感器,分别用于监测所述塔筒爬行装置的转轴力矩、转轴转速和温度;
46.控制模块,所述控制模块接收来自所述动力系统监测模块、张紧装置监测模块和转轴监测模块的监测信息,进行故障分析判断后控制所述塔筒爬行装置动作。
47.塔筒爬行装置在爬行过程中,动力系统出现故障的话会导致塔筒爬行装置停留于塔筒之上,甚至导致塔筒爬行装置坠落、损伤等危险情况的发生,为避免以上危险的出现,
本发明设置了动力系统监测模块,所述控制模块实时接收来自动力系统监测模块的监测信息,若监测到所述动力系统损坏或故障,则控制张紧皮带的轴轮旋转使得张紧皮带缩紧并卡死,并持续对张紧皮带施加压力,以保持张紧皮带锁紧。
48.张紧装置监测模块,用于监测所述塔筒爬行装置的张紧皮带的运行状态,具体的,在塔筒爬行装置运行过程中,可能会发生张紧皮带局部产生裂痕的情况,如果裂痕继续发展会导致张紧皮带断裂,则张紧皮带不能将塔筒爬行装置固定在塔筒上,将发生严重的安全事故,本发明在在塔筒爬行装置的张紧皮带2上,设置有细丝导线21,所述张紧装置监测模块与所述细丝导线21电连接。在塔筒爬行装置运行发生张紧皮带2局部产生裂痕时,将致使细丝导线21断裂,造成张紧装置监测模块开路,若张紧装置监测模块开路,塔筒爬行装置将不允许继续工作,正在工作的装置缓慢下降至塔筒底端,处于停机的装置不允许再次爬升。
49.本发明还包括紧急限速模块,所述紧急限速模块包括拉力限制器8和紧急安全带7,所述拉力限制器8设置于所述紧急安全带7两端,当装置限速模块检测到装置发生迅速下坠时,装置的限速控制器将在1.25s内动作,延伸组件中的两只压力臂相连的紧急安全带的预收紧装置与拉力限制器会启动,使得紧急安全带瞬时缩紧并卡死,防止塔筒爬行装置坠落,使得塔筒爬行装置在塔筒上固定,待工作人员进行检修。需要补充的是,拉力限制器8本身为技术成熟的现有技术,在此,简单陈述其原理:拉力限制器8内部设有能够感应位移及发射电脉冲的探头和气体发生器,气体发生器的一侧为一排球链,球链一侧为棘爪盘,探头负责收集坠落信息,然后释放出电脉冲,该脉冲传递到气体发生器上,气体发生器产生的气体在管道内迅速膨胀,压向球链,使球在管内往前移动,带动棘爪盘转。棘爪盘跟铀连为一体,紧急安全带7就绕在轴上,实现紧急安全带7的预收紧功能。
50.液压臂4中固定安装有电源电池、备用电源和能够向塔筒外壁提供压力的液压油箱5,备用电源能够替代常规电源,为爬行装置提供电力,避免单一电源故障。液压油箱5导通连接有液压伸缩杆6,能够通过液压油箱5调节液压伸缩杆6伸缩,使得多个液压臂4构成的环形结构直径发生变化。液压油箱5以及液压伸缩杆6构成驱动装置,能够使用液压油箱5来带动液压伸缩杆6伸缩,继而使得液压臂4向塔筒内收缩,调节液压臂4的弯曲程度,使其与塔筒契合并提供挤压压力,实现防坠的功能。本发明的备用电源系统,用于在所述塔筒爬行装置的常规电源系统出现故障时提供备用电力。塔筒爬行装置在爬行过程中,当常规电源系统出现故障时,常规电源系统向控制系统发出信号,控制系统立即向备用电源系统发出启动信号,此时备用电源开关打开,备用电源系统代替常规电源系统,为塔筒爬行装置提供电力,此时塔筒爬行装置立即停止作业并自动向下爬行至塔筒底部,等待地面工作人进行检修。
51.本发明还包括液压油压力监测模块,用于监测所述塔筒爬行装置的液压系统的压力。塔筒爬行装置在爬行过程中,液压系统出现故障,比如:液压油箱中溢流阀堵塞,油泵排量过大,导致压力过大。此时液压油箱控制伸缩杆使液压臂死抱住塔筒,可能导致塔筒损坏,液压系统液压油箱也可能出现溢液爆炸。本发明在油箱内设置压力传感器,当压力过大时,传感器自动切断油箱工作,使液压臂对塔筒的环抱压力变小甚至消失。此时张紧皮带缩紧,以防止塔筒爬行装置坠落,使得塔筒爬行装置在塔筒上固定,待工作人员进行检修。
52.当液压油压力监测模块检测到液压压力过大时,液压系统停止加压,并适当降压,
若塔筒爬行装置能缓慢张开夹报爬行履带臂,则塔筒爬行装置缓慢下降至塔筒底端,等待工作人员更换溢流阀。若装置不能完成泄压,则固定在原始位置处,等待工作人员检修。
53.当液压油压力监测模块检测到液压压力过大时,塔筒爬行装置液压系统停止加压,并适当降压,若塔筒爬行装置能缓慢张开夹报爬行履带臂,则塔筒爬行装置缓慢下降至塔筒底端,等待工作人员更换溢流阀。液压油箱中溢流阀堵塞,油泵排量过大,导致压力过大。此时液压油箱控制伸缩杆使液压臂死抱住塔筒,可能导致塔筒损坏,液压系统液压油箱也可能出现溢液爆炸。本发明在油箱内设置压力传感器,当压力过大时,传感器自动切断油箱工作,使液压臂对塔筒的环抱压力变小甚至消失,此时张紧皮带缩紧,以防止装置坠落,使得装置在塔筒上固定,待工作人员进行检修。
54.本发明另一方面提供一种用于风电塔筒爬行装置的多维安全控制方法,采用所述的多维安全控制装置,其特征在于:
55.所述控制模块实时接收来自所述张紧装置监测模块的监测信息,若所述张紧装置监测模块的信号正常,所述控制模块不动作;
56.若所述张紧装置监测模块的信号断开,则判断所述塔筒爬行装置的工作状态,
57.若所述塔筒爬行装置处于停机状态,则切断所述塔筒爬行装置的电源系统;
58.若所述塔筒爬行装置处于工作状态,则向所述塔筒爬行装置的履带爬行机发出指令,控制所述塔筒爬行装置下降至塔筒底端。
59.进一步的,所述控制模块实时接收来自所述转轴监测模块的监测信息,若所述转轴力矩大于正常力矩范围且转速为零,则判断为卡死状态,则所述控制模块发出警报;
60.若所述转轴力矩小于正常力矩范围且转速不为零,则判断为打滑状态,则所述控制模块发出控制信号,使转轴缓慢停止旋转,并适当反向旋转,并监测张紧皮带是否舒张,若能够舒张,则再次正转;
61.继续判断是否为打滑状态,若判断不为打滑状态,则所述塔筒爬行装置继续正常作业,若判断为打滑状态,则控制所述张紧皮带缓慢舒张,使所述塔筒爬行装置下降至塔筒底端。
62.进一步的,所述控制模块实时接收来自所述转轴监测模块的监测信息,若所述转轴的温度大于等于容许温度的1.1倍而小于等于1.25倍,则判断为过热,发出控制指令控制所述转轴停止工作,若所述转轴的温度恢复正常,则发出控制指令控制所述转轴继续工作;
63.若所述转轴的温度大于容许温度的1.25倍,则判断为短路,发出控制指令控制所述张紧皮带缓慢舒张,使所述塔筒爬行装置下降至塔筒底端。
64.进一步的,所述控制模块实时接收来自动力系统监测模块的监测信息,若监测到所述动力系统损坏或故障,则控制张紧皮带的轴轮旋转使得张紧皮带缩紧并卡死,并持续对张紧皮带施加压力,以保持张紧皮带锁紧。
65.进一步的,所述控制模块实时监测所述塔筒爬行装置的高度信息,当判断所述塔筒爬行装置下落速度超出正常范围时,控制所述紧急限速模块,启动紧急安全带的预收紧装置和拉力限制器,使得紧急安全带瞬时缩紧并卡死。
66.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1