一种基于集成式电液制动系统的汽车制动滑移率控制方法
本发明涉及汽车智能化,更具体的是,本发明涉及一种基于集成式电液制动系统的汽车制动滑移率控制方法。
背景技术:
1、汽车电动化和智能化的发展,要求制动系统能够实现主动制动和制动能量回收等功能,传统的液压制动系统难以匹配上述需求,而线控制动系统结构简单、响应迅速、制动力精准可调、能够实现四轮独立制动等优势,被认为是实现自动驾驶甚至无人驾驶的重要执行基石。其中,集成式电液制动系统是线控制动系统研究的重点。
2、集成式电液制动系统取消了真空助力器,采用一体化的结构设计方案,即将制动主缸、各传感器、踏板感觉模拟器、电机建压缸、液压控制单元、线束和管路等制造为一体,具有结构简单、体积小和集成度高等诸多优势,不仅能实现主动制动、为驾驶员提供良好的踏板感等功能,还具备最优滑移率主动控制、与再生制动和智能驾驶等配合的功能。但是受限于制动液泄露、传动机构间的摩擦及制动液与制动管路摩擦等因素,集成式电液制动系统具有较为复杂的非线性特性,这势必会影响制动压力控制的精度。
3、汽车制动滑移率控制是车辆稳定性控制和制动防抱死控制等的重要基础功能,通过对压力源和制动轮缸各电磁阀的协调控制,对四个车轮实现独立调节,以实现纵向最优滑移率控制效果,基于集成式电液制动系统的汽车制动滑移率控制能够有效提高整车稳定性和驾驶舒适性,但是,目前的汽车制动滑移率控制多是基于传统的制动执行器,车辆的适应性没办法提高。
技术实现思路
1、本发明的目的是设计开发了一种基于集成式电液制动系统的汽车制动滑移率控制方法,能够有效地帮助集成式电液制动系统克服传动机构摩擦和液压系统的非线性特性,实现了液压力的快速精确控制,提高了汽车主动制动时纵向滑移率控制性能。
2、本发明提供的技术方案为:
3、一种基于集成式电液制动系统的汽车制动滑移率控制方法,包括如下步骤:
4、步骤一、采集车辆各个车轮的实际利用附着系数、车轮的中心纵向速度、车轮半径和车轮的转动角速度,获取车辆各个车轮的目标滑移率和对应的实际滑移率;
5、步骤二、根据所述车辆各个车轮的目标滑移率和实际滑移率获得车辆各个轮缸的目标制动压力;
6、步骤三、根据所述车辆各个轮缸的目标制动压力获得电机建压缸的目标压力;
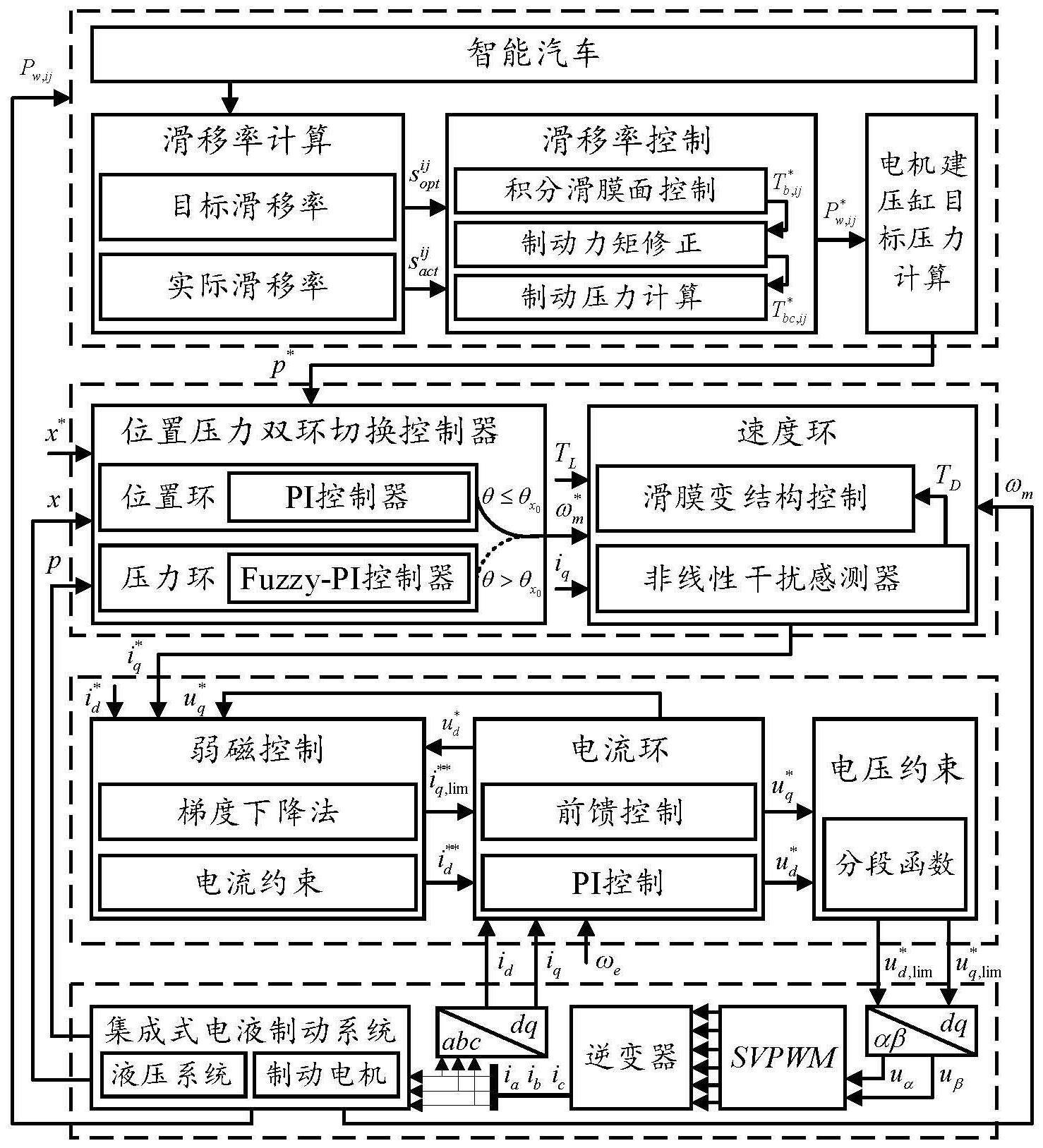
7、步骤四、根据电机建压缸的目标压力依次对永磁同步电机的位置-压力双环、速度环、电流环进行调节;
8、其中,所述位置-压力双环的调节过程为:
9、若则电机建压缸为位置环控制;
10、若则电机建压缸为压力环控制;
11、所述速度环的调节获得永磁同步电机目标转矩轴电流:
12、
13、式中,为永磁同步电机目标转矩轴电流,j为电机等效转动惯量,pn为磁极对数,ψf为永磁体磁链,c1为速度环滑模面的第一设计参数,c2为速度环滑模面的第二设计参数,为永磁同步电机目标机械转速,为永磁同步电机目标机械转速的导数,为永磁同步电机实际机械转速的导数,ωm为永磁同步电机实际机械转速,为电机目标机械转速的二次导数,为电机负载转矩的导数,为包含阻尼、摩擦和扰动等的干扰转矩的导数,ε为第二趋近律参数,δ为第三趋近律参数,λ为速度环滑膜面函数;
14、步骤五、根据所述电流环的调节进行电压约束获得永磁同步电机的转矩轴约束后目标电压和永磁同步电机的励磁轴约束后目标电压;
15、步骤六、根据所述永磁同步电机的转矩轴约束后目标电压和永磁同步电机的励磁轴约束后目标电压获得永磁同步电机三相电流,实现对电机建压缸的闭环控制。
16、优选的是,所述车辆各个车轮的目标滑移率满足:
17、
18、式中,为车轮的目标滑移率,i={f,r},j={l,r},sopt,m(m=1,2,3,4,5,6)为车辆所处的第m条典型路面的最优滑移率,μij,0为车轮的实际利用附着系数,um为第m条典型路面的利用附着系数,un(n=1,2,3,4,5,6)为第n条典型路面的利用附着系数;
19、所述车辆各个车轮的实际滑移率满足:
20、
21、式中,为车轮的实际滑移率,vij为车轮的中心纵向速度,rw为车轮半径,ωij为车轮的转动角速度。
22、优选的是,所述车辆各个轮缸的目标制动压力满足:
23、
24、式中,为轮缸的目标制动压力,kb,ij为轮缸的制动系数,re,ij为轮缸的制动压力有效作用半径,dij为制动轮缸的活塞直径,为目标制动力矩修正值;
25、其中,所述目标制动力矩修正值满足:
26、
27、式中,为目标制动力矩,κm为滑移率调控裕度;
28、所述目标制动力矩满足:
29、
30、式中,fx,ij为轮胎纵向力,iw为车轮转动惯量,f1,ij为滑移率第一设计参数,f2,ij为滑移率第二设计参数,σf,ij为滑移率滑膜面函数,ζij为第一趋近律参数。
31、优选的是,所述电机建压缸的目标压力满足:
32、
33、式中,p*为电机建压缸的目标压力,为安全系数。
34、优选的是,当所述电机建压缸为位置环控制时,所述位置环通过pi控制器调节,永磁同步电机的目标机械角速度满足:
35、
36、当所述电机建压缸为压力环控制时,所述压力环通过fuzzy-pi控制器调节,永磁同步电机的目标机械角速度满足:
37、
38、式中,θ为永磁同步电机的实际转角,为消除电机建压缸空行程时所对应的电机转角,kp1为位置环的比例系数,ki1为位置环的积分系数,kp2为压力环的比例系数,ki2为压力环的积分系数,p为电机建压缸的实际制动压力;
39、其中,所述消除电机建压缸空行程时所对应的电机转角满足:
40、
41、式中,i为减速齿轮副的传动比,x0为电机建压缸的空行程,h为滚珠丝杠副的导程。
42、优选的是,在所述电流环之前还包括弱磁控制器,所述速度环的输出经过弱磁控制器修正后输入到电流环,电流环的输出反馈至弱磁控制器修正,形成修正迭代过程,所述弱磁控制器具体包括:
43、所述弱磁控制器的启动条件为:
44、δu<0;
45、式中,δu为最大定子相电压与电流环控制器输出电压的差值;
46、根据梯度下降法确定弱磁区域i和弱磁区域ii:
47、针对弱磁区域i,电流修正为:
48、
49、式中,为弱磁后的修正励磁轴电流,λ1为第一增益系数,为弱磁后的修正转矩轴电流;
50、针对弱磁区域ii,电流修正为:
51、
52、式中,为弱磁后的修正励磁轴电流,λ2为第二增益系数,为弱磁后的修正转矩轴电流;
53、获得励磁轴弱磁后目标电流:
54、
55、式中,为目标励磁轴电流,为弱磁后的修正励磁轴电流经电流约束后的励磁轴电流,为励磁轴弱磁后目标电流,为弱磁后的修正励磁轴电流的最小值,ismax为永磁同步电机的最大电流,idrate为永磁同步电机额定电流的直轴分量;
56、获得转矩轴弱磁后目标约束电流:
57、
58、式中,为转矩轴弱磁后目标约束电流,为转矩轴弱磁后目标电流的最大值,为电机目标转矩轴电流,为转矩轴弱磁后目标电流。
59、优选的是,所述最大定子相电压与电流环控制器输出电压的差值满足:
60、
61、式中,usmax为最大定子相电压,us电流环控制器输出电压,udc为直流母线电压,为转矩轴目标电压,为励磁轴目标电压。
62、优选的是,所述电流环的输出满足:
63、
64、式中,kdp为第一比例增益,kqp为第二比例增益,kdi为第一积分增益、kqi为第二积分增益,iq为转矩轴电流,id为励磁轴电流,ωe为永磁同步电机的实际电角速度、lq为转矩轴电感、ld为励磁轴电感。
65、优选的是,所述电压约束具体包括:
66、当时,
67、
68、当时,
69、
70、式中,为永磁同步电机的转矩轴约束后目标电压,为永磁同步电机的励磁轴约束后目标电压。
71、优选的是,所述步骤六具体包括:
72、所述永磁同步电机的转矩轴约束后目标电压和永磁同步电机的励磁轴约束后目标电压经过park逆变换、空间矢量脉冲宽度调制和逆变器,向永磁同步电机输出三相电流,驱动永磁同步电机运转,永磁同步电机经过clark-park变换输出转矩轴实际电流、励磁轴实际电流和永磁同步电机实际电角速度,同时液压系统向外输出各制动轮缸实际压力、电机建压缸实际压力、电机建压缸活塞实际位移和永磁同步电机实际机械角速度,形成完整的闭环控制。
73、本发明所述的有益效果:
74、(1)、本发明设计开发的一种基于集成式电液制动系统的汽车制动滑移率控制方法,通过目标滑移率的计算及滑移率的控制,能够有效地提高对路面附着系数变化的自适应性,防止电机建压缸由于压力过高造成的能量过损、甚至硬件损坏等问题,能够有效实现车辆实时滑移率的良好跟随,减小了车辆的抖振问题,提高车辆稳定性;
75、(2)、本发明设计开发的一种基于集成式电液制动系统的汽车制动滑移率控制方法,能够有效地消除电机建压缸空行程及液压系统非线性特性的影响,实现了电机建压缸实际压力对不同目标压力快速精准地跟随,提高了系统对外界干扰的鲁棒性,保证了快速精确建压的能力,并提高电机的响应速度和控制性能,提升了集成式电液制动系统的工作效率,保证了使用安全性;
76、(3)、本发明设计开发的一种基于集成式电液制动系统的汽车制动滑移率控制方法,提供了完整的闭环控制策略,有效匹配汽车电动化、智能化的需求,提高车辆行驶的安全性和驾驶舒适性,为实现高级别自动驾驶奠定执行基础。
- 还没有人留言评论。精彩留言会获得点赞!