一种无制动踏板汽车制动液排气方法与流程
1.本发明涉及制动液排气技术领域,尤其是涉及一种无制动踏板汽车制动液排气方法。
背景技术:
2.当前汽车普遍采用液压制动,液压制动系统的传达介质是液体,制动回路中不允许存在空气。车辆在完成制动液加注后,均需要通过制动排液排气来确保液压制动力达到正常使用范围(具体参见申请号为cn202210959796.8的中国发明专利)。
3.目前已知的制动液排气方法主要采用一人在驾驶舱反复踩制动和松制动,辅助人员配合在四个车轮位置的卡钳放油口松、紧螺栓,通过观察气泡是否完全排干净来实现制动排气,这种排气方法的弊端是操作复杂,且需要多人配合工作,排气后的压力值无法直观显示,制动效果不可控。
4.随着汽车电动化、智能化的快速发展,无制动踏板的无人驾驶汽车已经逐渐实现量产。这类无人驾驶汽车多数采用电控液压制动方式,车辆没有制动踏板,无法通过传统的制动液排气方法进行排气。
技术实现要素:
5.有鉴于此,有必要提供一种无制动踏板汽车制动液排气方法、设备及可读存储介质,用以解决现有的,无制动踏板的无人驾驶汽车无法通过传统的制动液排气方法进行排气的技术问题。
6.为了实现上述目的,本发明提供了一种无制动踏板汽车制动液排气方法,包括:
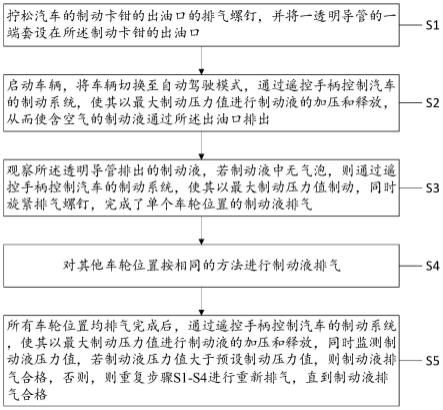
7.s1、拧松汽车的制动卡钳的出油口的排气螺钉,并将一透明导管的一端套设在所述制动卡钳的出油口;
8.s2、启动车辆,将车辆切换至自动驾驶模式,通过遥控手柄控制汽车的制动系统,使其以最大制动压力值进行制动液的加压和释放,从而使含空气的制动液通过所述出油口排出;
9.s3、观察所述透明导管排出的制动液,若制动液中无气泡,则通过遥控手柄控制汽车的制动系统,使其以最大制动压力值制动,同时旋紧排气螺钉,完成了单个车轮位置的制动液排气;
10.s4、对其他车轮位置按相同的方法进行制动液排气;
11.s5、所有车轮位置均排气完成后,通过遥控手柄控制汽车的制动系统,使其以最大制动压力值进行制动液的加压和释放,同时监测制动液压力值,若制动液压力值大于预设制动压力值,则制动液排气合格,否则,则重复步骤s1-s4进行重新排气,直到制动液排气合格。
12.在一些实施例中,所述步骤s1中,所述透明导管的另一端与一容器连通。
13.在一些实施例中,所述步骤s2中,通过遥控手柄控制汽车的制动系统的具体方法
为:
14.通过遥控手柄发送指令至ad接收器,ad接收器将指令信号转发至ad控制器,ad控制器将指令转换成can报文,发送给ebooster控制器,ebooster控制器控制ebooster总成执行对应的制动压力值加压,通过制动液加压至汽车电子稳定控制系统,汽车电子稳定控制系统根据整车参数计算,再将制动压力分配各四根制动管路,从而通过制动卡钳对四个车轮进行制动操作。
15.在一些实施例中,所述遥控手柄通过无线电波发送指令至ad接收器。
16.在一些实施例中,所述遥控手柄通过2.4ghz频段的无线电波发送指令至ad接收器。
17.在一些实施例中,所述步骤s5中,监测制动液压力值的具体方法为:
18.将电脑通过obd口连接车辆,读取制动系统的制动压力值。
19.在一些实施例中,所述电脑通过can通讯读取制动系统的制动压力值。
20.在一些实施例中,所述步骤s5中,预设制动压力值为7mpa。
21.在一些实施例中,所述步骤s3中,在观察所述透明导管排出的制动液中有无气泡时,还应监测制动液压力值,若制动液压力值的变化幅度小于预设幅度,且透明导管排出的制动液中无气泡,则表明排气完成。
22.在一些实施例中,四个车轮的制动液排气先后顺序为:右后轮、左后轮、右前轮及左前轮。
23.与现有技术相比,本发明提出的技术方案的有益效果是:本发明提供的技术方案实现了对无制动踏板汽车制动液排气,并且在排气时,通过遥控手柄控制汽车和排气螺钉的旋松旋紧可由一人单独完成,简化了排气操作的复杂度;同时,还可以通过监测制动液压力值判断制动液排气效果。
附图说明
24.图1是本发明提供的无制动踏板汽车制动液排气方法的一实施例的流程示意图;
25.图2是图1中的排气方法的实施过程示意图;
26.图3是无制动踏板汽车制动系统连接关系图;
27.图4是无制动踏板汽车制动系统结构示意图;
28.图中:1-排气螺钉、2-透明导管、3-容器、4-遥控手柄、5-ad控制器、6-ebooster控制器、7-汽车电子稳定控制系统、8-制动管路、9-制动卡钳、10-电脑。
具体实施方式
29.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
30.请参照图1-图3,本发明提供了一种无制动踏板汽车制动液排气方法,包括:
31.s1、拧松汽车的制动卡钳的出油口的排气螺钉1,并将一透明导管2的一端套设在所述制动卡钳的出油口;
32.s2、启动车辆,将车辆切换至自动驾驶模式,通过遥控手柄控制汽车的制动系统,使其以最大制动压力值进行制动液的加压和释放,从而使含空气的制动液通过所述出油口
排出;
33.s3、观察所述透明导管2排出的制动液,若制动液中无气泡,则通过遥控手柄控制汽车的制动系统,使其以最大制动压力值制动,同时旋紧排气螺钉1,完成了单个车轮位置的制动液排气;
34.s4、对其他车轮位置按相同的方法进行制动液排气;
35.s5、所有车轮位置均排气完成后,通过遥控手柄4控制汽车的制动系统,使其以最大制动压力值进行制动液的加压和释放,同时监测制动液压力值,若制动液压力值大于预设制动压力值,则制动液排气合格,否则,则重复步骤s1-s4进行重新排气,直到制动液排气合格。本实施例中,预设制动压力值为7mpa。
36.本发明提供的技术方案实现了对无制动踏板汽车制动液排气,并且在排气时,通过遥控手柄4控制汽车和排气螺钉1的旋松旋紧可由一人单独完成,简化了排气操作的复杂度;同时,还可以通过监测制动液压力值判断制动液排气效果。
37.为了便于回收利用排出的制动液,请参照图2,在一优选的实施例中,所述步骤s1中,所述透明导管2的另一端与一容器3连通。
38.为了具体实现通过遥控手柄4控制汽车的制动系统,请参照图3和图4,在一优选的实施例中,通过遥控手柄控制汽车的制动系统的具体方法为:通过遥控手柄4发送指令至ad接收器,ad接收器将指令信号转发至ad控制器5,ad控制器5将指令转换成can报文,发送给ebooster控制器6,ebooster控制器6控制ebooster总成执行对应的制动压力值加压,通过制动液加压至汽车电子稳定控制系统7,汽车电子稳定控制系统7根据整车参数计算,再将制动压力分配各四根制动管路8,从而通过制动卡钳9对四个车轮进行制动操作。ebooster是不依赖真空源的机电伺服机构,适用于所有动力总成,包括混动和电动车,具有多种产品优势。ebooster利用传感器感知驾驶者踩下制动踏板的力度和速度,并将信号处理之后传给电控单元,电控单元控制助力电机对应的扭距,在机电放大机构的驱动下,推动制动泵工作,从而实现电控制动,响应速度更快并且能够精准的控制压力。
39.为了具体实现遥控手柄4与ad接收器的通信,请参照图3和图4,在一优选的实施例中,所述遥控手柄通过无线电波发送指令至ad接收器。具体地,所述遥控手柄通过2.4ghz频段的无线电波发送指令至ad接收器。
40.为了具体实现对制动液压力的监测,请参照图3,在一优选的实施例中,所述步骤s5中,监测制动液压力值的具体方法为:将电脑10通过obd口连接车辆,通过can通讯读取制动系统的制动压力值。
41.为了提高排气监测效果,请参照图1-图3,在一优选的实施例中,所述步骤s3中,在观察所述透明导管2排出的制动液中有无气泡时,还应监测制动液压力值,若制动液压力值的变化幅度小于预设幅度,且透明导管2排出的制动液中无气泡,则表明排气完成。
42.为了具体实现四个车轮的制动液的排气,请参照图1,在一优选的实施例中,四个车轮的制动液排气先后顺序为:右后轮、左后轮、右前轮及左前轮。
43.综上所述,本发明提供的技术方案实现了对无制动踏板汽车制动液排气,并且在排气时,通过遥控手柄4控制汽车和排气螺钉1的旋松旋紧可由一人单独完成,简化了排气操作的复杂度;同时,还可以通过监测制动液压力值判断制动液排气效果。
44.以上所述仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,
任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1