一种机器人移动底盘用麦克纳姆轮的制作方法
1.本实用新型属于麦克纳姆轮技术领域,具体为一种机器人移动底盘用麦克纳姆轮。
背景技术:
2.在机器人比赛或者其他机器人、无人车等应用中,移动采用的滚轮通常是常规的橡胶轮,这样的轮子在移动过程中,前后运动较为顺畅,但在转向时灵活性较差,因此,需要设计一种机器人移动底盘用麦克纳姆轮。
技术实现要素:
3.针对上述情况,为克服现有技术的缺陷,本实用新型提供一种机器人移动底盘用麦克纳姆轮,有效的解决了目前机器人移动轮子转向时灵活性较差的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种机器人移动底盘用麦克纳姆轮,包括轮毂组件、滚轮组件、轴孔和固定孔,所述滚轮组件安装于轮毂组件外端,轮毂组件轴心端贯穿开设有轴孔,轴孔外端周向连接有固定孔,轮毂组件包括第一轮毂主体,第一轮毂主体一端固定连接有第二轮毂主体,第一轮毂主体和第二轮毂主体外端均周向等角度连接有固定座,相邻固定座之间形成有安装槽;
5.滚轮组件包括滚轮主体,滚轮主体内部贯穿连接有连接轴,连接轴两端分别与安装槽两侧的固定座连接,且连接轴两端均连接有定位螺钉,定位螺钉与固定座螺纹连接。
6.优选的,所述第一轮毂主体和第二轮毂主体均呈类五边形结构设置。
7.优选的,所述固定座呈v型结构设置,位于第一轮毂主体和第二轮毂主体外端的固定座数量均为五个。
8.优选的,所述固定座两端均贯穿开设有连接孔,两个连接孔一侧均开设有螺纹孔,螺纹孔与连接孔贯通。
9.优选的,所述连接轴外端两侧均开设有方便定位螺钉抵持的定位孔,且连接轴一侧端开设有方便一字起转动的一字槽。
10.优选的,所述滚轮主体内部嵌装有轴套,连接轴位于轴套内部连接。
11.与现有技术相比,本实用新型的有益效果是:
12.(1)、本实用新型,通过轮毂组件和滚轮组件构成的麦克纳姆轮结构,使得机器人在转向时方向性能好,且转向性能及平稳性高,能够全方位移动顺畅且灵活;
13.(2)、该新型滚轮组件在安装时,利用连接轴穿过连接孔和滚轮主体内部,使得连接轴与两侧的固定座连接,然后利用定位螺钉转动,使得定位螺钉与定位孔抵持,从而将连接轴固定,完成滚轮组件的安装,使得滚轮组件装配便捷。
附图说明
14.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用
新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。
15.在附图中:
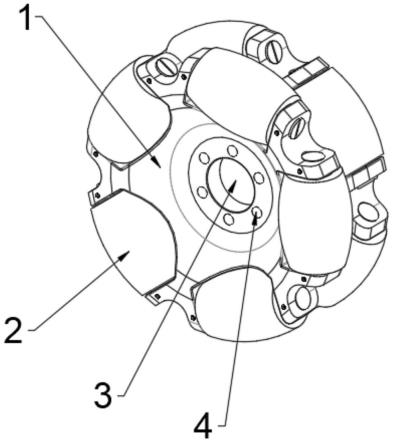
16.图1为本实用新型结构示意图;
17.图2为本实用新型的侧视图;
18.图3为本实用新型轮毂组件的结构示意图;
19.图4为本实用新型滚轮组件的结构示意图;
20.图中:1、轮毂组件;101、第一轮毂主体;102、第二轮毂主体;103、固定座;104、安装槽;105、连接孔;106、螺纹孔;2、滚轮组件;201、滚轮主体;202、连接轴;203、定位螺钉;204、定位孔;205、轴套;206、一字槽;3、轴孔;4、固定孔。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例;基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.实施例一,由图1-图4给出,本实用新型包括轮毂组件1、滚轮组件2、轴孔3和固定孔4,滚轮组件2安装于轮毂组件1外端,轮毂组件1轴心端贯穿开设有轴孔3,轴孔3外端周向连接有固定孔4,轮毂组件1包括第一轮毂主体101,第一轮毂主体101一端固定连接有第二轮毂主体102,第一轮毂主体101和第二轮毂主体102外端均周向等角度连接有固定座103,相邻固定座103之间形成有安装槽104,第一轮毂主体101和第二轮毂主体102均呈类五边形结构设置,固定座103呈v型结构设置,位于第一轮毂主体101和第二轮毂主体102外端的固定座103数量均为五个,固定座103两端均贯穿开设有连接孔105,两个连接孔105一侧均开设有螺纹孔106,螺纹孔106与连接孔105贯通;
23.滚轮组件2包括滚轮主体201,滚轮主体201内部贯穿连接有连接轴202,连接轴202两端分别与安装槽104两侧的固定座103连接,且连接轴202两端均连接有定位螺钉203,定位螺钉203与固定座103螺纹连接,连接轴202外端两侧均开设有方便定位螺钉203抵持的定位孔204,且连接轴202一侧端开设有方便一字起转动的一字槽206,滚轮主体201内部嵌装有轴套205,连接轴202位于轴套205内部连接。
24.工作原理:通过将滚轮主体201置于安装槽104内,然后利用连接轴202穿过固定座103上的连接孔105和滚轮主体201内部,使得连接轴202与两侧的固定座103连接,将滚轮主体201安装于安装槽104内,然后利用工具一字起与连接轴202侧端的一字槽206配合,将连接轴202转动,使得定位孔204旋转至与螺纹孔106对应处,然后利用定位螺钉203转动,使得定位螺钉203与定位孔204抵持,从而将连接轴202固定,完成滚轮组件2的安装,使得轮毂组件1与滚轮组件2之间完成装配,然后将其与机器人底盘安装,使得机器人能够全方位进行移动,移动灵活。
技术特征:
1.一种机器人移动底盘用麦克纳姆轮,包括轮毂组件(1)、滚轮组件(2)、轴孔(3)和固定孔(4),其特征在于:所述滚轮组件(2)安装于轮毂组件(1)外端,轮毂组件(1)轴心端贯穿开设有轴孔(3),轴孔(3)外端周向连接有固定孔(4),轮毂组件(1)包括第一轮毂主体(101),第一轮毂主体(101)一端固定连接有第二轮毂主体(102),第一轮毂主体(101)和第二轮毂主体(102)外端均周向等角度连接有固定座(103),相邻固定座(103)之间形成有安装槽(104);滚轮组件(2)包括滚轮主体(201),滚轮主体(201)内部贯穿连接有连接轴(202),连接轴(202)两端分别与安装槽(104)两侧的固定座(103)连接,且连接轴(202)两端均连接有定位螺钉(203),定位螺钉(203)与固定座(103)螺纹连接。2.根据权利要求1所述的一种机器人移动底盘用麦克纳姆轮,其特征在于:所述第一轮毂主体(101)和第二轮毂主体(102)均呈类五边形结构设置。3.根据权利要求1所述的一种机器人移动底盘用麦克纳姆轮,其特征在于:所述固定座(103)呈v型结构设置,位于第一轮毂主体(101)和第二轮毂主体(102)外端的固定座(103)数量均为五个。4.根据权利要求1所述的一种机器人移动底盘用麦克纳姆轮,其特征在于:所述固定座(103)两端均贯穿开设有连接孔(105),两个连接孔(105)一侧均开设有螺纹孔(106),螺纹孔(106)与连接孔(105)贯通。5.根据权利要求1所述的一种机器人移动底盘用麦克纳姆轮,其特征在于:所述连接轴(202)外端两侧均开设有方便定位螺钉(203)抵持的定位孔(204),且连接轴()一侧端开设有方便一字起转动的一字槽(206)。6.根据权利要求1所述的一种机器人移动底盘用麦克纳姆轮,其特征在于:所述滚轮主体(201)内部嵌装有轴套(205),连接轴(202)位于轴套(205)内部连接。
技术总结
本实用新型涉及麦克纳姆轮技术领域,且公开了一种机器人移动底盘用麦克纳姆轮,解决了目前机器人移动轮子转向时灵活性较差的问题,其包括轮毂组件、滚轮组件、轴孔和固定孔,所述滚轮组件安装于轮毂组件外端,轮毂组件轴心端贯穿开设有轴孔,轴孔外端周向连接有固定孔,轮毂组件包括第一轮毂主体,第一轮毂主体一端固定连接有第二轮毂主体,第一轮毂主体和第二轮毂主体外端均周向等角度连接有固定座,相邻固定座之间形成有安装槽,本实用新型,通过轮毂组件和滚轮组件构成的麦克纳姆轮结构,使得机器人在转向时方向性能好,且转向性能及平稳性高,能够全方位移动顺畅且灵活。能够全方位移动顺畅且灵活。能够全方位移动顺畅且灵活。
技术研发人员:刘居康 宗春晓 郑有志 宗德运 宗德龙
受保护的技术使用者:青岛铭浩源精密机械有限公司
技术研发日:2022.04.25
技术公布日:2022/9/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1