麦克纳姆轮装置和机器人的制作方法
本技术涉及全向移动装置,尤其涉及一种麦克纳姆轮和机器人。
背景技术:
1、麦克纳姆轮是一种特殊的可以实现全向移动的轮子。这种全方位移动方式是基于一个有许多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面。依靠各自机轮的方向和速度,这些力的最终合成在任何要求的方向上产生一个合力矢量从而保证了这个平台在最终的合力矢量的方向上能自由地移动,而不改变机轮自身的方向。在它的轮缘上斜向分布着许多小滚子,故轮子可以横向滑移。小滚子的母线很特殊,当轮子绕着固定的轮心轴转动时,各个小滚子的包络线为圆柱面,所以该轮能够连续地向前滚动。为了使麦克纳姆轮转动,需要驱动麦克纳姆轮的驱动装置,但是目前的驱动装置常常设置在麦克纳姆轮的外部,这样驱动装置和麦克纳姆轮连接后的麦克纳姆轮装置整体体积过大,不利于全向移动底盘带动机器人灵活移动。
技术实现思路
1、有鉴于此,本实用新型实施例提供了一种麦克纳姆轮装置和机器人,用于解决现有的麦克纳姆轮装置结构不紧凑,占用体积过大的技术问题。
2、本实用新型采用的技术方案是:
3、第一方面,本实用新型提供了一种麦克纳姆轮装置,包括:
4、驱动装置,包括外转无刷电机和减速器,所述外转无刷电机包括一端开口的筒状壳体、电机轴和连接部,所述连接部位于外转无刷电机轴向方向上与所述开口相对的一端,所述减速器的输入端与外转无刷电机的输出轴连接;
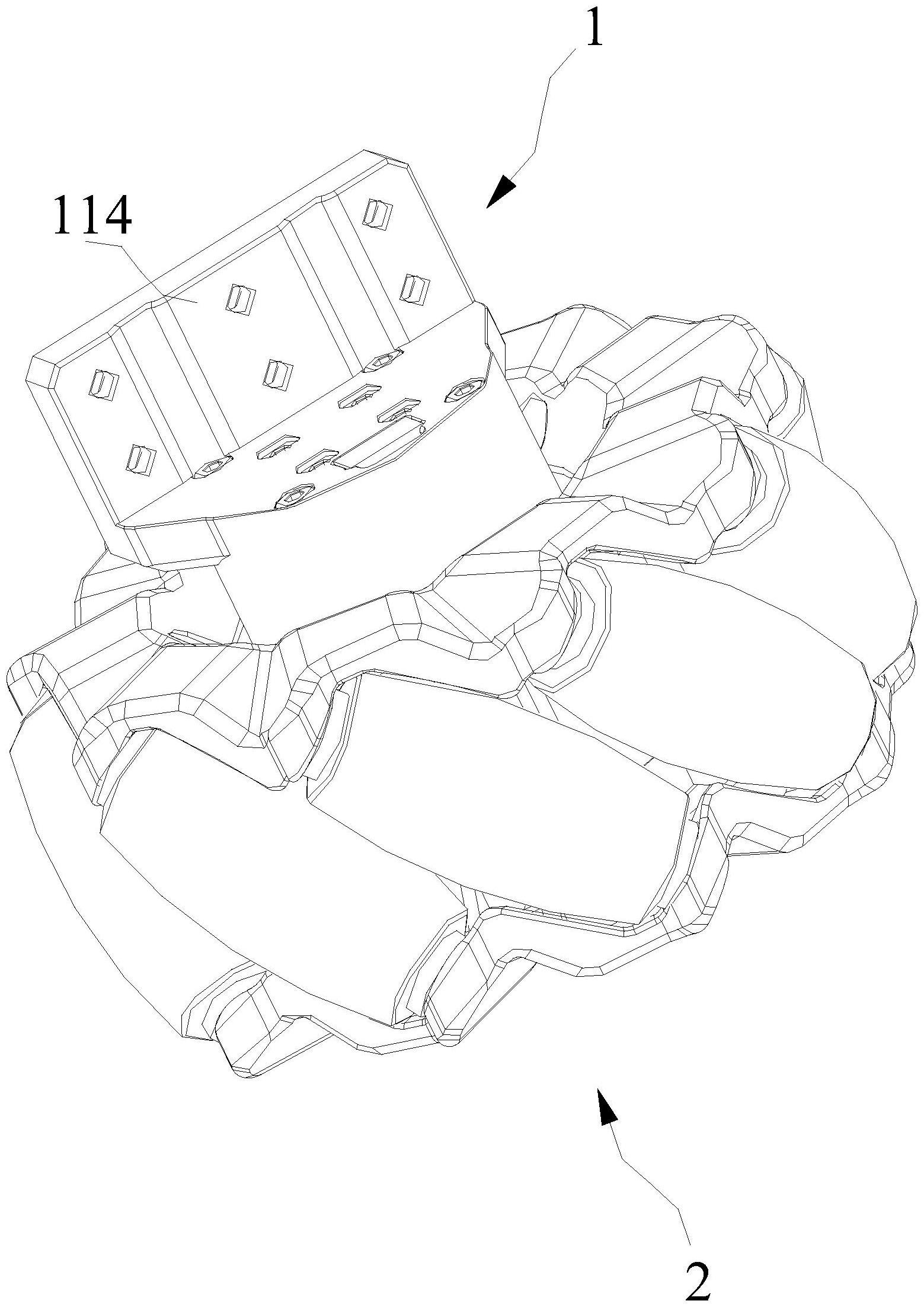
5、麦克纳姆轮,包括支架和若干个沿所述支架的周向方向排布的滚子,所述滚子在支架的外表面与支架可转动连接,所述滚子的转轴方向与支架的转轴方向成预设角度,所述支架上设置有中空的容置腔,所述驱动装置的至少一部分插入到所述容置腔中,所述连接部露出所述容置腔外,所述驱动装置的输出端由背向所述连接部的一侧与所述支架连接。
6、优选地,所述支架上的容置腔的内壁为圆柱形,所述驱动装置插入到所述容置腔中的部分的外壁为直径小于容置腔的内壁直径的圆柱形。
7、优选地,所述连接部的外壁与所述壳体的外壁相切。
8、优选地,所述连接部和所述麦克纳姆轮的转轴轴线在麦克纳姆轮的径向方向上相距预定距离。
9、优选地,所述连接部上设置有定位安装面,所述定位安装面与麦克纳姆轮的转轴轴线相平行。
10、优选地,所述支架由第一构件和第二构件拼接形成,所述滚子的一端与第一构件形成转动连接,相对的另一端与第二构件形成转动连接。
11、优选地,还包括连接件,所述驱动装置的输出端为所述减速器输出轴,所述支架上设置有第一安装腔,所述第一安装腔与所述容置腔相通,所述减速器输出轴安装在所述第一安装腔中,所述第一构件上设置有第一连接孔,所述第二构件上设置有第二连接孔,所述减速器输出轴上设置有第三连接孔,所述连接件的一端依次穿过第一连接孔、第二连接孔和第三连接孔并与第三连接孔螺纹连接,另一端与第二构件背向第一构件的表面抵接。
12、优选地,所述第二构件上设置有朝第一构件方向凸起的凸起部,所述第一安装腔位于所述凸起部中,所述第二构件朝向第一构件的一端朝远离第一构件的方向凹陷形成第二安装腔,所述凸起部的至少一部分位于所述第二安装腔中。
13、优选地,所述减速器为行星齿轮减速器。
14、第二方面本实用新型提高一种机器人,包括第一方面所述的麦克纳姆轮装置。
15、有益效果:本实用新型的麦克纳姆轮装置将麦克纳姆轮的支架设置为中空的结构形式,这样由外转无刷电机和减速器所组成的驱动装置除了连接部之外的部分都可以隐藏到麦克纳姆轮的容置腔内,这样就巧妙利用了麦克纳姆轮的内部空间,节省了驱动装置所占用的大部分空间从而使麦克纳姆轮装置整体结构更加紧凑,体积也明显减小,同时也不影响驱动装置驱动麦克纳姆轮转动。由于驱动装置只剩下连接部露出麦克纳姆轮之外,因此也不影响驱动装置与全向移动装置的主体支架的可靠连接。此外由于外转无刷电机体积小输出扭矩大,因此驱动装置更容易隐藏到麦克纳姆轮的容置腔内。
技术特征:
1.麦克纳姆轮装置,其特征在于,包括:
2.根据权利要求1所述的麦克纳姆轮装置,其特征在于,所述支架上的容置腔的内壁为圆柱形,所述驱动装置插入到所述容置腔中的部分的外壁为直径小于容置腔的内壁直径的圆柱形。
3.根据权利要求2所述的麦克纳姆轮装置,其特征在于,所述连接部的外壁与所述壳体的外壁相切。
4.根据权利要求1所述的麦克纳姆轮装置,其特征在于,所述连接部和所述麦克纳姆轮的转轴轴线在麦克纳姆轮的径向方向上相距预定距离。
5.根据权利要求1所述的麦克纳姆轮装置,其特征在于,所述连接部上设置有定位安装面,所述定位安装面与麦克纳姆轮的转轴轴线相平行。
6.根据权利要求5所述的麦克纳姆轮装置,其特征在于,所述支架由第一构件和第二构件拼接形成,所述滚子的一端与第一构件形成转动连接,相对的另一端与第二构件形成转动连接。
7.根据权利要求6所述的麦克纳姆轮装置,其特征在于,还包括连接件,所述驱动装置的输出端为所述减速器输出轴,所述支架上设置有第一安装腔,所述第一安装腔与所述容置腔相通,所述减速器输出轴安装在所述第一安装腔中,所述第一构件上设置有第一连接孔,所述第二构件上设置有第二连接孔,所述减速器输出轴上设置有第三连接孔,所述连接件的一端依次穿过第二连接孔、第一连接孔和第三连接孔并与第三连接孔螺纹连接,另一端与第二构件背向第一构件的表面抵接。
8.根据权利要求7所述的麦克纳姆轮装置,其特征在于,所述第二构件上设置有朝第一构件方向凸起的凸起部,所述第一安装腔位于所述凸起部中,所述第二构件朝向第一构件的一端朝远离第一构件的方向凹陷形成第二安装腔,所述第二安装腔的至少一部分位于所述凸起部中。
9.根据权利要求1至7中任一项所述的麦克纳姆轮装置,其特征在于,所述减速器为行星齿轮减速器。
10.机器人,其特征在于,包括权利要求1至9中任一项所述的麦克纳姆轮装置。
技术总结
本技术属于全向移动装置技术领域,尤其涉及一种麦克纳姆轮和机器人。本技术的麦克纳姆轮装置,包括:驱动装置,包括外转无刷电机和减速器,所述外转无刷电机包括一端开口的筒状壳体、电机轴和连接部,所述连接部位于外转无刷电机轴向方向上与所述开口相对的一端。麦克纳姆轮,包括支架和若干个沿所述支架的周向方向排布的滚子,所述滚子在支架的外表面与支架可转动连接,滚子的转轴方向与支架的转轴方向成预设角度,所述支架上设置有中空的容置腔,驱动装置的至少一部分插入到所述容置腔中,所述连接部露出所述容置腔外,驱动装置的输出端由背向所述连接部的一侧与所述支架连接。本技术结构紧凑,体积小,输出扭矩大。
技术研发人员:张金龙,招俊健,关健泳
受保护的技术使用者:深圳市工匠社科技有限公司
技术研发日:20221012
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!