一种横摆角速度矫正方法、装置、车辆、设备及介质与流程
本发明涉及车辆驾驶参数控制领域,具体涉及一种横摆角速度矫正方法、装置、车辆、设备及介质。
背景技术:
1、车辆动力学控制中车辆航向角、侧偏角和横摆角为车辆基础姿态参数,其精度关系到车辆多种动力学模型建立。在adas系统中,本车车辆横摆角速度作为基本姿态参数输入,实现包含环境感知、车辆定位、本车及周车轨迹预测、行为决策、运动规划及运动控制等功能。横摆角速度为自动驾驶中自动泊车、aeb、fcw、ldw等功能模块实现的基础,其精度较大影响对应功能安全性。
2、公开号为cn102621570a的方案中基于双全球定位和惯性校正的汽车动力学参数校正方法,公开了一种横摆角校正及优化方法,通过在车体上设置两个全球定位模块和惯性校正模块,共同完成汽车的车体侧偏角β、车体由转向引起的侧向加速度ay1、车体横摆角ψ、车体侧倾角车体质心位置的横向加速度ay1、车体质心位置纵向加速度ax、车体质心位置的横摆角速度r、车体质心位置的侧倾角速度p的校正。将imu与gps进行组合校正,充分发挥gps全天侯、无误差累计、快速测姿的特点,gps信号能同时给与imu实时反馈,不断校正imu校正的漂移偏差。此方法增加了gps系统对车辆横摆角精度矫正,但需要付出较高系统硬件及通信成本。
3、l2级自动驾驶车型的yawrate(中文:横摆角速度)基本都来源于esp系统,esp系统计算yawrate则是基于车辆的横向加速度(ay)。当车辆行驶中遇到路面冲击,如:减速带、井盖、凹坑等异常路况下,esp系统中的加速度传感器提供的横向加速度ay会出现误测,导致esp系统计算的yawarte非常大的偏差。如图5中a点指示的yawrate突发尖峰值,自动驾驶车辆adas控制器对会采取猛烈反偏方向盘的回应从而导致yawrate突发反向震荡矫正到b点,自动驾驶依次再响应猛偏至c点处的yawrate值,如此导致方向控制处于摆动不稳定状态,导致乘客抱怨。
技术实现思路
1、本发明提供了一种横摆角速度矫正方法、装置、车辆、设备及介质,在不增加硬件或通信成本的前提下,提高横摆角速度校正精度,进而更好满足车辆自动驾驶系统对输入的车辆横摆角速度的精度要求。
2、本发明的技术方案为:
3、本发明提供了一种横摆角速度矫正方法,包括:
4、获取车辆的方向盘转角、车速和当前采样周期输出的实际横摆角速度;
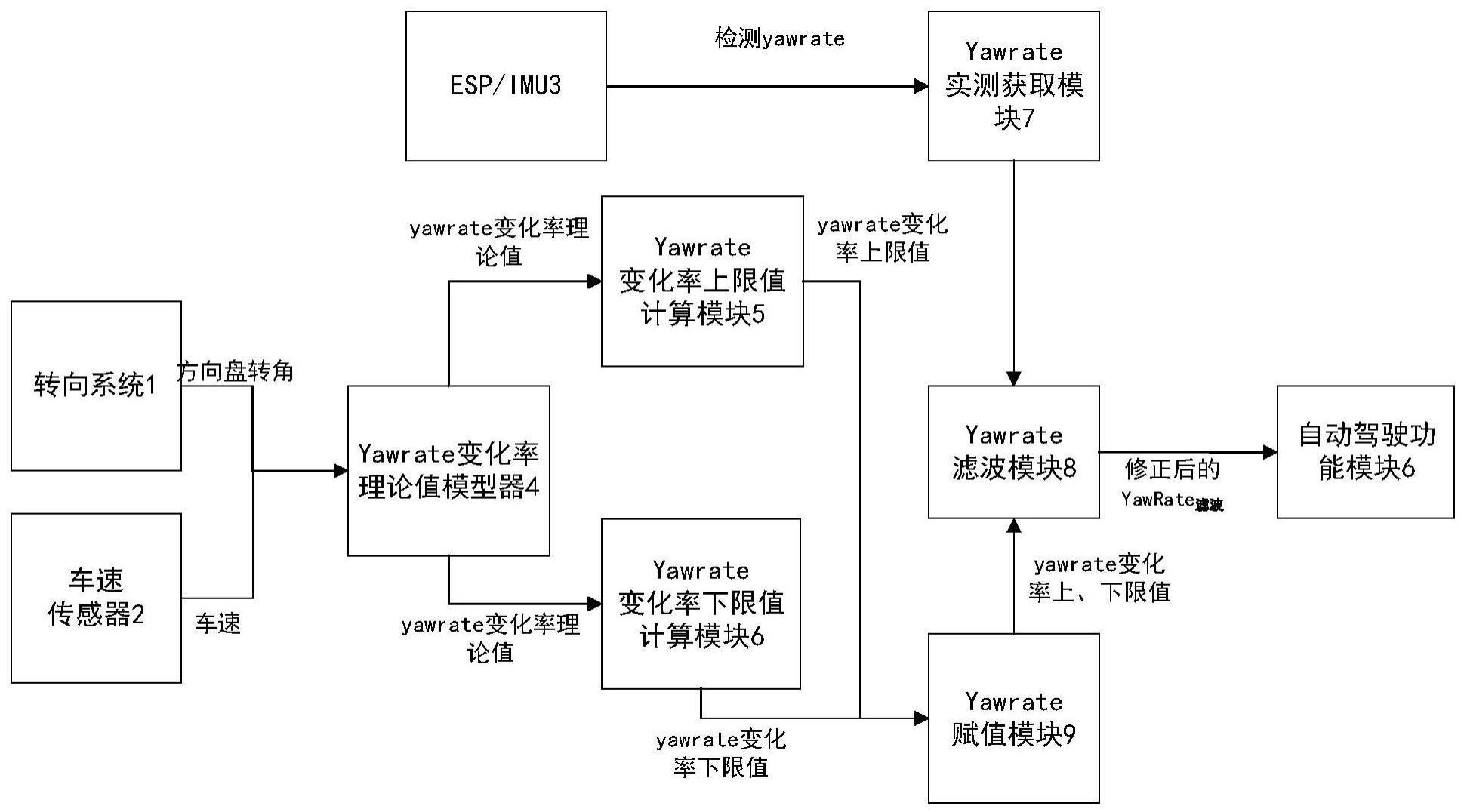
5、根据车辆的方向盘转角和车速,实时预测横摆角速度变化率上限值和横摆角速度变化率下限值;
6、根据横摆角速度变化率上限值和横摆角速度变化率下限值,对实际横摆角速度进行矫正。
7、优选地,根据车辆的方向盘转角和车速,实时预测横摆角速度变化率上限值和横摆角速度变化率下限值的步骤包括:
8、将车辆的方向盘转角和车速输入预先建立的横摆角速度变化率理论值模型中,得到横摆角速度变化率理论值;
9、将横摆角速度变化率理论值分别输入预先建立的横摆角速度变化率上限值模型中,得到横摆角速度变化率上限值;
10、将横摆角速度变化率理论值分别输入预先建立的横摆角速度变化率下限值模型中,得到横摆角速度变化率下限值。
11、优选地,预先建立的横摆角速度变化率理论值模型通过公式组:
12、
13、计算得到横摆角速度变化率理论值其中,α为车辆的方向盘转角,k为方向盘与轮胎转向比,θ为转向轮角度,为转向轮角速度,v为车辆的车速,l为车辆轴距。
14、优选地,将横摆角速度变化率理论值分别输入预先建立的横摆角速度变化率上限值模型中,得到横摆角速度变化率上限值的步骤包括:
15、将横摆角速度变化率理论值与第一矫正系数的乘积,确定为横摆角速度变化率上限值;
16、第一矫正系数的取值与道路曲率c和车速v呈负相关。
17、优选地,将横摆角速度变化率理论值分别输入预先建立的横摆角速度变化率下限值模型中,得到横摆角速度变化率下限值的步骤包括:
18、将横摆角速度变化率理论值与第二矫正系数的乘积,确定为横摆角速度变化率下限值;
19、第二矫正系数的取值与道路曲率c和车速v呈负相关,第二矫正系数小于第一矫正系数。
20、优选地,根据横摆角速度变化率上限值和横摆角速度变化率下限值,对实际横摆角速度进行矫正的步骤包括:
21、根据实际横摆角速度确定实际横摆角速度变化率;
22、根据横摆角速度变化率上限值和横摆角速度变化率下限值同实际横摆角速度变化率的相对大小关系,对实际横摆角速度进行矫正。
23、优选地,根据横摆角速度变化率上限值和横摆角速度变化率下限值同实际横摆角速度变化率的相对大小关系,对实际横摆角速度进行矫正的步骤包括:
24、若实际横摆角速度变化率>横摆角速度变化率上限值,则根据上一采样周期输出的实际横摆角速度和横摆角速度变化率上限值对实际横摆角速度进行矫正;
25、若实际横摆角速度变化率<横摆角速度变化率上限值,则根据上一采样周期输出的实际横摆角速度和横摆角速度变化率下限值对实际横摆角速度进行矫正;
26、若横摆角速度变化率下限值≤实际横摆角速度变化率≤横摆角速度变化率上限值,则直接以当前采样周期输出的实际横摆角速度作为矫正后的实际横摆角速度。
27、优选地,根据上一采样周期输出的实际横摆角速度和横摆角速度变化率上限值对实际横摆角速度进行矫正的步骤包括:
28、先将横摆角速度变化率上限值与一个采样周期的长度相乘,再将得到的乘积与上一采样周期输出的实际横摆角速度相加,得到矫正后的实际横摆角速度。
29、优选地,根据上一采样周期输出的实际横摆角速度和横摆角速度变化率下限值对实际横摆角速度进行矫正的步骤包括:
30、先将横摆角速度变化率下限值与一个采样周期的长度相乘,再将得到的乘积与上一采样周期输出的实际横摆角速度相加,得到矫正后的实际横摆角速度。
31、优选地,所获取到的实际横摆角速度由车辆的车身电子稳定系统esp或惯性测量单元imu输出。
32、优选地,所获取到的车辆的方向盘转角为实际测量的实时方向盘转角或采用预定转角预测模型所预测得到的预测方向盘转角;
33、所获取到的车辆的车速为实际测量的实时车速或采用预定车速预测模型所预测得到的预测车速。
34、本发明还提供了一种横摆角速度矫正装置,包括:
35、车辆参数获取模块,用于获取车辆的方向盘转角、车速和当前采样周期输出的实际横摆角速度;
36、横摆角速度变化率上下限值预测模块,用于根据车辆的方向盘转角和车速,实时预测横摆角速度变化率上限值和横摆角速度变化率下限值;
37、实际横摆角速度矫正模块,用于根据横摆角速度变化率上限值和横摆角速度变化率下限值,对实际横摆角速度进行矫正。
38、优选地,横摆角速度变化率上下限值预测模块包括:
39、横摆角速度变化率理论值预测单元,用于将车辆的方向盘转角和车速输入预先建立的横摆角速度变化率理论值模型中,得到横摆角速度变化率理论值;
40、横摆角速度变化率上限值预测单元,用于将横摆角速度变化率理论值分别输入预先建立的横摆角速度变化率上限值模型中,得到横摆角速度变化率上限值;
41、横摆角速度变化率下限值预测单元,用于将横摆角速度变化率理论值分别输入预先建立的横摆角速度变化率下限值模型中,得到横摆角速度变化率下限值。
42、优选地,实际横摆角速度矫正模块包括:
43、实际横摆角速度变化率确定单元,用于根据实际横摆角速度确定实际横摆角速度变化率;
44、实际横摆角速度矫正单元,用于根据横摆角速度变化率上限值和横摆角速度变化率下限值同实际横摆角速度变化率的相对大小关系,对实际横摆角速度进行矫正。
45、优选地,实际横摆角速度矫正单元包括:
46、第一实际横摆角速度矫正子单元,用于若实际横摆角速度变化率>横摆角速度变化率上限值,则根据上一采样周期输出的实际横摆角速度和横摆角速度变化率上限值对实际横摆角速度进行矫正;
47、第二实际横摆角速度矫正子单元,用于若实际横摆角速度变化率<横摆角速度变化率上限值,则根据上一采样周期输出的实际横摆角速度和横摆角速度变化率下限值对实际横摆角速度进行矫正;
48、第三实际横摆角速度矫正子单元,用于若横摆角速度变化率下限值≤实际横摆角速度变化率≤横摆角速度变化率上限值,则直接以当前采样周期输出的实际横摆角速度作为矫正后的实际横摆角速度。
49、本发明还提供了一种车辆,包括上述的横摆角速度矫正装置。
50、本发明还提供了一种控制设备,包括处理器,存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如上述的横摆角速度矫正方法的步骤。
51、本发明还提供了一种可读存储介质,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如上述的横摆角速度矫正方法的步骤。
52、本发明的有益效果为:
53、1)通过构建转向系统影响的横摆角速度变化率理论值模型,从而脱离特定传感器(如加速度传感器)误差对横摆角速度的测算影响;并利用车辆自身参数确定的横摆角速度结合路况参数标定,构建对横摆角速度滤波的横摆角速度滤波过程,实时实现对esp系统或imu测得的实时横摆角速度滤波,规避在特定路况下esp系统的加速度传感器等受路况影响而产生较大误差。
54、2)该方法能够对当前状态实测的横摆角速度yawrate自动调整,滤波过程响应及时且自动适应当前路况,避免普通滤波器参数固化,且存在时间延迟问题,规避自动驾驶系统因时延而触发的误操作。
55、3)在横摆角速度变化率上、下限值的动态确定过程中,冗余考虑引入了过弯、排水、道路施工、道路沉降、湿滑路面等正常路况对测量横摆角速度正常影响,只过滤异常路况对横摆角速度yawrate的影响值。提升了滤波系统的强壮性。
56、4)该方法对算力要求不高,可在高功能安全等级的mcu上实时运行,满足智能驾驶高功能安全要求。
- 还没有人留言评论。精彩留言会获得点赞!