一种无人驾驶汽车速度控制系统
本发明属于汽车速度控制,具体是一种无人驾驶汽车速度控制系统。
背景技术:
1、无人驾驶汽车也称为无人车、自动驾驶汽车,是指车辆能够依据自身对周围环境条件的感知、理解,自行进行运动控制,且能达到人类驾驶员驾驶水平。无人驾驶汽车通过复杂道路特别是交叉路口时,由于交叉路口车流量人流量较大,以及道路更加复杂,为此如何安全的通过如交叉路口这样的流量大、道路复杂的道路已成为无人驾驶汽车必要解决的问题之一。
2、为此中国专利文献cn108922177b提供了一种无人驾驶车辆通过交叉路口时速度控制系统及方法,所述系统包括汽车avcs控制系统、道路信息采集系统、交叉路口区域控制中心系统三个子系统。三个子系统之间的控制和数据传输通过无线计算机进行连接与处理。本发明实现了无人驾驶车与车、车与路之间的信息交互,考虑了道路路表纹理、车辆运行状态、路面天气环境及道路交叉路口形状因素,对无人驾驶汽车通过干燥路面上交叉路口的运行速度进行测算与控制,同时对交通流比较大的交叉路口区域内车辆之间驾驶行为进行安全预警。可以快速处理城市道路交叉路口的安全驾驶行为,并能够根据道路线形的变化状况实时决策交叉路口驾驶策略,确保车辆通过道路交叉路口过程中的安全性。
3、上述专利文献结合道路信息、道路上的其他车辆信息以及当前天气信息等,实时决策交叉路口驾驶策略以提高通过道路交叉口的安全性;在满足驾驶安全性的情况下,人们同时希望从无人驾驶过程中体验到自己所喜好的驾驶风格,驾驶风格大致可分为激进型和保守型,激进型驾驶风格在保证安全的情况下偏向于追求驾驶过程中的操纵感,保守型驾驶风格在保证安全的情况下追求驾驶过程中的舒适性;现有无人驾驶技术大都忽略了驾驶人员驾驶风格不同的问题。
技术实现思路
1、本发明的目的是提供一种无人驾驶汽车速度控制系统,根据驾驶人员所喜好的驾驶风格,为其提供适宜的驾驶策略,当面临前方道路出现行人和动物等障碍物时,能够在保证无人驾驶安全性的前提下,为驾驶人员带来所喜好的驾驶风格。
2、为了实现上述目的,本发明的技术方案如下:包括:
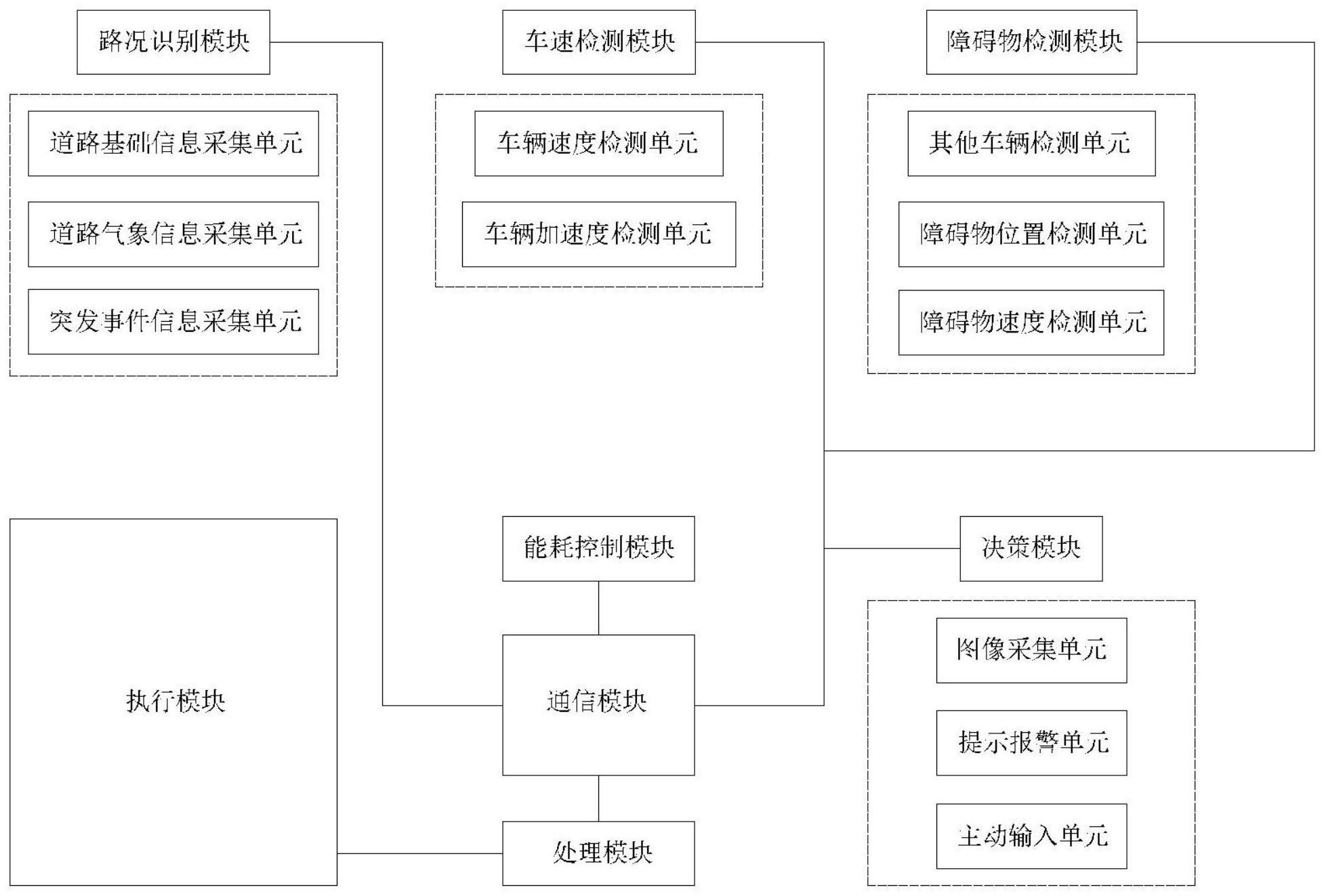
3、路况识别模块,用于识别当前道路的路况信息;路况识别模块包括:道路基础信息采集单元,用于采集当前行驶道路的技术指标信息;道路气象信息采集单元,用于采集当前行驶道路的气象信息;突发事件信息采集单元,用于采集当前行驶道路的突发事件信息;
4、车速检测模块,用于检测当前车辆的速度信息;车速检测模块包括:车辆速度检测单元,用于检测当前车辆行驶车速信息;车辆加速度检测单元,用于检测当前车辆加速度信息;
5、障碍物检测模块,用于检测车辆前后方存在的障碍物信息以及其他车辆信息;障碍物检测模块包括:其他车辆检测单元,用于检测车辆周围其他车辆;障碍物位置检测单元,用于检测障碍物的位置信息,障碍物速度检测单元,用于检测障碍物的行径速度信息;
6、决策模块,用于获取驾驶人员以及乘客的驾驶风格信息;
7、通信模块,用于路况识别模块、车速检测模块、障碍物检测模块和决策模块与处理模块通信,处理模块与执行模块通信;
8、处理模块,用于通过通信模块与路况识别模块、车速检测模块、障碍物检测模块和决策模块与处理模块通信,获取:当前道路的路况信息、技术指标信息、气象信息和突发事件信息,当前车辆的速度信息和加速度信息,其他车辆信息、障碍物的位置信息和行径速度信息,以及驾驶人员的驾驶风格信息,根据上述信息得出应对障碍物时的驾驶策略;并将驾驶策略发送至执行模块;
9、执行模块,用于接收驾驶策略,并执行驾驶策略,控制车辆。
10、进一步,决策模块获取驾驶人员以及乘客的驾驶风格信息采用用户主动输入方式或者决策模块主动获取方式。
11、进一步,决策模块包括:图像采集单元、提示报警单元和主动输入单元,图像采集单元用于采集乘客的面部图像信息,提示报警单元用于对驾驶人员进行提示报警,主动输入单元用于乘客主动选择驾驶风格。
12、进一步,图像采集单元还用于采集乘客的乘车姿态信息。
13、进一步,道路的技术指标信息包括但不仅限于道路限速信息,道路车道宽度信息和红绿灯信息。
14、进一步,车辆加速度检测单元包括:网络获取子单元和训练后的神经网络子单元,网络获取子单元用于在网络上获取所驾驶车辆的加速度信息,训练后的神经网络子单元用于在平时驾驶车辆过程中获取所驾驶车辆的加速度信息,并取两者获得的加速度信息发送至处理模块。
15、进一步,其他车辆检测单元、障碍物位置检测单元和障碍物速度检测单元均为激光雷达。
16、进一步,还包括能耗控制模块,用于获取车辆电量剩余信息,并根据车辆电量剩余信息,对驾驶风格进行调整;能耗控制模块通过通信模块与处理模块通信。
17、采用上述方案有以下有益效果:
18、1、相较于现有技术,本发明通过获取当前道路的路况信息、技术指标信息、气象信息和突发事件信息,当前车辆的速度信息和加速度信息,其他车辆信息、障碍物的位置信息和行径速度信息,构建出应对障碍物的不同驾驶策略,并结合驾驶人员和乘客的驾驶风格信息选择适宜驾驶人员和乘客的驾驶策略来通过障碍物,在保证驾驶安全的前提下,为驾驶人员和乘客提供适宜的驾驶风格。
19、2、本发明的驾驶风格信息除驾驶人员和乘客自主选择外,还可主动进行获取,从驾驶人员和乘客的乘坐体验出发,为不适宜激进型驾驶风格的驾驶人员和乘客主动提供保守型的驾驶风格,提高驾驶人员和乘客无人驾驶中的乘坐体验。
20、3、根据不同的驾驶风格能源消耗的不同,本发明可对纯电车辆的剩余电量信息进行采集,当纯电车辆电量较低时,主动改变驾驶风格,以保证纯电车辆有足够抵达目的地的电量。
技术特征:
1.一种无人驾驶汽车速度控制系统,其特征在于:包括:
2.根据权利要求1所述的无人驾驶汽车速度控制系统,其特征在于:决策模块获取驾驶人员以及乘客的驾驶风格信息采用用户主动输入方式或者决策模块主动获取方式。
3.根据权利要求1所述的无人驾驶汽车速度控制系统,其特征在于:决策模块包括:图像采集单元、提示报警单元和主动输入单元,图像采集单元用于采集乘客的面部图像信息,提示报警单元用于对驾驶人员进行提示报警,主动输入单元用于乘客主动选择驾驶风格。
4.根据权利要求3所述的无人驾驶汽车速度控制系统,其特征在于:图像采集单元还用于采集乘客的乘车姿态信息。
5.根据权利要求1所述的无人驾驶汽车速度控制系统,其特征在于:道路的技术指标信息包括但不仅限于道路限速信息,道路车道宽度信息和红绿灯信息。
6.根据权利要求1所述的无人驾驶汽车速度控制系统,其特征在于:车辆加速度检测单元包括:网络获取子单元和训练后的神经网络子单元,网络获取子单元用于在网络上获取所驾驶车辆的加速度信息,训练后的神经网络子单元用于在平时驾驶车辆过程中获取所驾驶车辆的加速度信息,并取两者获得的加速度信息发送至处理模块。
7.根据权利要求1所述的无人驾驶汽车速度控制系统,其特征在于:其他车辆检测单元、障碍物位置检测单元和障碍物速度检测单元均为激光雷达。
8.根据权利要求1所述的无人驾驶汽车速度控制系统,其特征在于:还包括能耗控制模块,用于获取车辆电量剩余信息,并根据车辆电量剩余信息,对驾驶风格进行调整;能耗控制模块通过通信模块与处理模块通信。
技术总结
本发明公开了汽车速度控制技术领域的一种无人驾驶汽车速度控制系统,包括路况识别模块,用于识别当前道路的路况信息;车速检测模块,用于检测当前车辆的速度信息;决策模块,用于获取驾驶人员以及乘客的驾驶风格信息;通信模块,用于路况识别模块、车速检测模块、障碍物检测模块和决策模块与处理模块通信,处理模块与执行模块通信;处理模块,上述模块采集信息得出应对障碍物时的驾驶策略;并将驾驶策略发送至执行模块;行模块,用于接收驾驶策略,并执行驾驶策略,控制车辆。本发明构建出应对障碍物的不同驾驶策略,在保证驾驶安全的前提下,为驾驶人员和乘客提供适宜的驾驶风格,增强驾驶无人汽车的舒适性。
技术研发人员:罗洋坤,郝丹卉
受保护的技术使用者:湖南汽车工程职业学院
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!