一种坡道制动工况的参考车速估算方法及装置与流程
本技术涉及整车控制,具体而言,涉及一种坡道制动工况的参考车速估算方法及装置。
背景技术:
1、目前,计算制动工况参考车速的方法主要有斜率法和卡尔曼滤波法。斜率法利用abs做动的规律,计算前两次制动之间轮速下降的斜率,并以此估计下一次制动时的轮速。卡尔曼滤波法依据复杂的车辆模型,进行车辆动力学计算得出参考车速。在实践中发现,斜率法无法估算abs启动瞬间车辆的车速,因为需要至少两个具备附着的轮速点才能形成第一段估算斜率的计算。且斜率法对车轮稳定状态的估算要求较高,车轮稳定状态估算的误差会直接导致计算出的斜率出现偏差。斜率法也无法应对车轮短时间抱死、制动和驱动切换等工况的车速计算。卡尔曼滤波法需要获取大量的车辆受力信息,其中包括车辆各轮的实际制动力。可见,现有方法不适用于坡道工况的参考车速估算,适用性差,且估算误差大。
技术实现思路
1、本技术实施例的目的在于提供一种坡道制动工况的参考车速估算方法及装置,能够进行坡道工况的参考车速估算,适用性好,估算误差小。
2、本技术实施例第一方面提供了一种坡道制动工况的参考车速估算方法,包括:
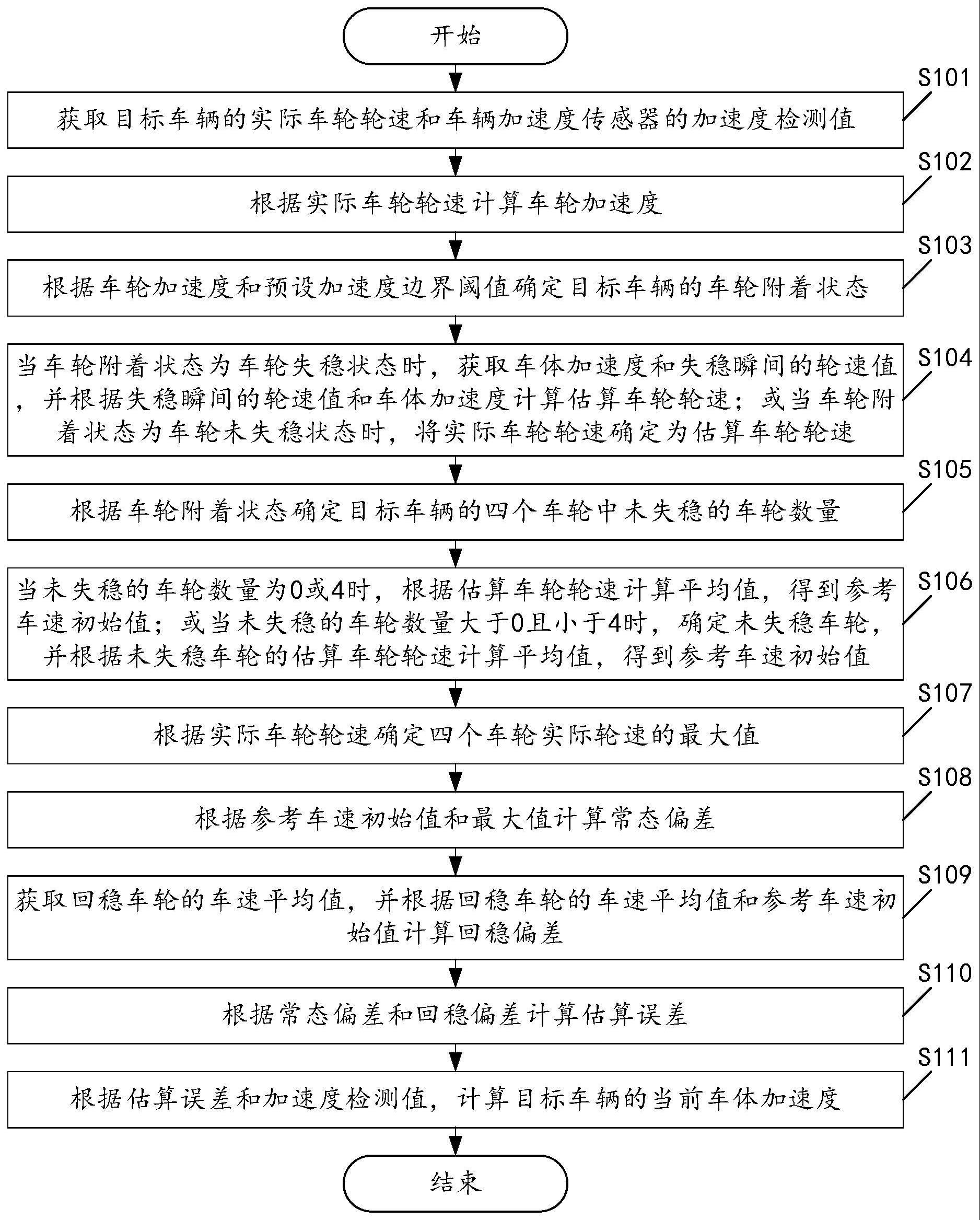
3、获取目标车辆的实际车轮轮速和车辆加速度传感器的加速度检测值;
4、根据所述实际车轮轮速确定所述目标车辆的车轮附着状态;
5、根据所述车轮附着状态确定所述目标车辆的估算车轮轮速;
6、根据所述估算车轮轮速和所述车轮附着状态估算所述目标车辆的参考车速初始值;
7、根据所述参考车速初始值计算估算误差;
8、根据所述估算误差和所述加速度检测值,计算所述目标车辆的当前车体加速度。
9、在上述实现过程中,该方法可以优先获取目标车辆的实际车轮轮速和车辆加速度传感器的加速度检测值;然后,根据实际车轮轮速确定目标车辆的车轮附着状态;再后,根据车轮附着状态确定目标车辆的估算车轮轮速;其后,根据估算车轮轮速和车轮附着状态估算目标车辆的参考车速初始值;再然后,根据参考车速初始值计算估算误差;最后,根据估算误差和加速度检测值,计算目标车辆的当前车体加速度。可见,当前车体加速度能够在进行参考车速估算,且车轮附着状态为车轮失稳状态时,用于计算估算车轮轮速,因此该方法能够进行坡道工况的参考车速估算,从而提高适用能力,并降低估算误差。
10、进一步地,所述根据所述实际车轮轮速确定所述目标车辆的车轮附着状态,包括:
11、根据所述实际车轮轮速计算车轮加速度;
12、根据所述车轮加速度和预设加速度边界阈值确定所述目标车辆的车轮附着状态;其中,所述车轮附着状态为车轮失稳状态或车轮未失稳状态。
13、进一步地,所述根据所述车轮附着状态确定所述目标车辆的估算车轮轮速,包括:
14、当所述车轮附着状态为所述车轮失稳状态时,获取车体加速度和失稳瞬间的轮速值,并根据所述失稳瞬间的轮速值和所述车体加速度计算估算车轮轮速;
15、当所述车轮附着状态为所述车轮未失稳状态时,将所述实际车轮轮速确定为估算车轮轮速。
16、进一步地,所述根据所述估算车轮轮速和所述车轮附着状态估算所述目标车辆的参考车速初始值,包括:
17、根据所述车轮附着状态确定所述目标车辆的四个车轮中未失稳的车轮数量;
18、当所述未失稳的车轮数量为0或4时,根据所述估算车轮轮速计算平均值,得到参考车速初始值;
19、当所述未失稳的车轮数量大于0且小于4时,确定未失稳车轮,并根据所述未失稳车轮的估算车轮轮速计算平均值,得到参考车速初始值。
20、进一步地,所述根据所述参考车速初始值计算估算误差,包括:
21、根据所述实际车轮轮速确定四个车轮实际轮速的最大值;
22、根据所述参考车速初始值和所述最大值计算常态偏差;
23、获取回稳车轮的车速平均值,并根据所述回稳车轮的车速平均值和所述参考车速初始值计算回稳偏差;
24、根据所述常态偏差和所述回稳偏差计算估算误差。
25、本技术实施例第二方面提供了一种坡道制动工况的参考车速估算装置,所述坡道制动工况的参考车速估算装置包括:
26、获取单元,用于获取目标车辆的实际车轮轮速和车辆加速度传感器的加速度检测值;
27、第一确定单元,用于根据所述实际车轮轮速确定所述目标车辆的车轮附着状态;
28、第二确定单元,用于根据所述车轮附着状态确定所述目标车辆的估算车轮轮速;
29、估算单元,用于根据所述估算车轮轮速和所述车轮附着状态估算所述目标车辆的参考车速初始值;
30、第一计算单元,用于根据所述参考车速初始值计算估算误差;
31、第二计算单元,用于根据所述估算误差和所述加速度检测值,计算所述目标车辆的当前车体加速度。
32、在上述实现过程中,该装置可以通过获取单元获取目标车辆的实际车轮轮速和车辆加速度传感器的加速度检测值;通过第一确定单元来根据实际车轮轮速确定目标车辆的车轮附着状态;通过第二确定单元来根据车轮附着状态确定目标车辆的估算车轮轮速;通过估算单元来根据估算车轮轮速和车轮附着状态估算目标车辆的参考车速初始值;通过第一计算单元来根据参考车速初始值计算估算误差;通过第二计算单元来根据估算误差和加速度检测值,计算目标车辆的当前车体加速度。可见,该装置能够进行坡道工况的参考车速估算,提高适用性,降低估算误差。
33、进一步地,所述第一确定单元包括:
34、第一计算子单元,用于根据所述实际车轮轮速计算车轮加速度;
35、第一确定子单元,用于根据所述车轮加速度和预设加速度边界阈值确定所述目标车辆的车轮附着状态;其中,所述车轮附着状态为车轮失稳状态或车轮未失稳状态。
36、进一步地,所述第二确定单元,具体用于当所述车轮附着状态为所述车轮失稳状态时,获取车体加速度和失稳瞬间的轮速值,并根据所述失稳瞬间的轮速值和所述车体加速度计算估算车轮轮速;当所述车轮附着状态为所述车轮未失稳状态时,将所述实际车轮轮速确定为估算车轮轮速。
37、进一步地,所述估算单元包括:
38、第二确定子单元,用于根据所述车轮附着状态确定所述目标车辆的四个车轮中未失稳的车轮数量;
39、第二计算子单元,用于当所述未失稳的车轮数量为0或4时,根据所述估算车轮轮速计算平均值,得到参考车速初始值;
40、所述第二确定子单元,还用于当所述未失稳的车轮数量大于0且小于4时,确定未失稳车轮,并根据所述未失稳车轮的估算车轮轮速计算平均值,得到参考车速初始值。
41、进一步地,所述第一计算单元包括:
42、第三确定子单元,用于根据所述实际车轮轮速确定四个车轮实际轮速的最大值;
43、第三计算子单元,用于根据所述参考车速初始值和所述最大值计算常态偏差;
44、所述第三计算子单元,还用于获取回稳车轮的车速平均值,并根据所述回稳车轮的车速平均值和所述参考车速初始值计算回稳偏差;
45、所述第三计算子单元,还用于根据所述常态偏差和所述回稳偏差计算估算误差。
46、本技术实施例第三方面提供了一种电子设备,包括存储器以及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行本技术实施例第一方面中任一项所述的坡道制动工况的参考车速估算方法。
47、本技术实施例第四方面提供了一种计算机可读存储介质,其存储有计算机程序指令,所述计算机程序指令被一处理器读取并运行时,执行本技术实施例第一方面中任一项所述的坡道制动工况的参考车速估算方法。
- 还没有人留言评论。精彩留言会获得点赞!