四轮毂电机驱动全线控电动汽车轮胎力估计方法及系统
本发明涉及车辆安全控制,特别是涉及一种四轮毂电机驱动全线控电动汽车轮胎力估计方法及系统。
背景技术:
1、车辆纵向、侧向、垂向轮胎力学状态是车辆主动安全控制的主要控制变量,同时也是车辆综合稳定性评估的重要指标,它的准确获取直接关系车辆行驶稳定性与安全性。目前已有的现有技术如下:
2、(1)一种分布式电驱动车辆的前轮侧向力估算方法,首先采集车辆状态信号,利用车辆动力学方程实时估计轮胎的纵向力和垂向力;然后将估计的各轮的纵向力连同纵向加速度信号、侧向加速度信号、横摆角速度信号、方向盘转角信号传给车辆控制器中的卡尔曼侧向力观测器,得到两前轮的卡尔曼侧向力估计值和后轴侧向力估计值;最后利用各轮垂向力和前轮转角差对估计的侧向力进一步处理,得到最终的侧向力估计值。
3、(2)一种转向系统转向力矩及轮胎侧向力估计方法,包括以下步骤:1.采集车辆的纵向力和侧向力,根据车辆的七自由度模型,建立基于各个轮胎旋转中心以及质心的横摆力矩;2.利用干扰观测器对各轮胎旋转中心的横摆力矩进行计算得到各轮胎旋转中心的侧向力矩估计值;3.采用最小二乘法估计前后轮胎的侧向力之和;4.利用经验估计法分别计算前后轮的侧向力;5.将前后轮的侧向力转换为转向力矩并输出至助力电机中。
4、(3)一种四轮驱动电动汽车轮胎力软测量方法,包括以下步骤:第一步:获取汽车的纵向速度、质心侧偏角、纵向加速度、侧向加速度、前轮转角及轮胎纵向力;第二步:将获取的汽车的纵向速度、质心侧偏角、纵向加速度、侧向加速度、前轮转角及轮胎纵向力信息,输入给非线性车辆动力学模型,通过车辆动力学模型计算得到预估的纵向加速度和横向加速度;第三步:将获取的汽车的纵向速度、质心侧偏角、纵向加速度、横向加速度、前轮转角及轮胎纵向力信息和第二步预估的纵加速度、横向加速度信息一起输入给无迹卡尔曼滤波算法,获得基于模型的汽车轮胎力估计值。
5、(4)一种分布式驱动电动车的前轮侧向力估计方法,主要步骤为:1.依据各种传感器采集到的车辆状态信息,基于车辆动力学方程设计了滑模纵向力观测器对轮胎的纵向力进行实时估计;2.将估计的各轮纵向力以及纵向加速度信号、侧向加速度信号、横摆角速度信号等传输给滑模侧向力观测器,得到右前轮的侧向力估计值;3.通过滤波模块,对估计出的侧向力进一步优化处理,解决了侧向力估计值中出现的奇异问题,从而输出最终的两前轮侧向力估计值。
6、(5)分布式驱动电动汽车质心侧偏角与轮胎侧向力估计方法,该方法基于交互多模型算法-容积卡尔曼滤波对车辆质心侧偏角和轮胎侧向力进行实时估计,建立八自由度车辆模型,包括纵向运动、横向运动、横摆运动、侧倾运动以及四个轮胎的运动,非线性车辆模型考虑了车辆行驶过程中侧倾运动和载荷转移的影响;然后建立线性轮胎模型和非线性dugoff轮胎模型作为交互多模型的模型集;最后对车辆质心侧偏角和轮胎侧向力进行估计。
7、(6)一种轮胎侧向力估算方法,包括以下步骤:1.设置一包括有轮心纵向速度传感器、路面附着系数传感器、轮胎垂向力传感器、轮胎侧偏角传感器、轮胎滑转率传感器和侧向力估计模块的轮胎侧向力估算系统;2.所述侧向力估计模块根据所采集的轮胎滑转率值、轮胎垂向力值、轮胎侧偏角和路面附着系数值,估算轮胎的准静态侧向力值;3.根据轮胎的动态侧向力与准静态侧向力的关系建立动态轮胎模型,所述侧向力估计模块根据采集的轮心纵向速度,并通过动态轮胎模型对所述步骤2估算的轮胎准静态侧向力值进行修正,得到动态轮胎侧向力值;4.将所述步骤3得到的动态轮胎侧向力值发送到整车控制器中,用于对车辆进行控制和监测。
8、可以看出的是,目前车辆轮胎力估计方法大多基于特定的轮胎模型进行估算,而轮胎模型参数繁多,使得基于模型的估计方法呈现工况适应性差,精度低等问题;同时已有方案缺乏能够解耦估计车辆纵向、侧向和垂向轮胎力的高可靠估计方法。
技术实现思路
1、为了克服现有技术的不足,本发明的目的是提供一种四轮毂电机驱动全线控电动汽车轮胎力估计方法及系统。
2、为实现上述目的,本发明提供了如下方案:
3、一种四轮毂电机驱动全线控电动汽车轮胎力估计方法,包括:
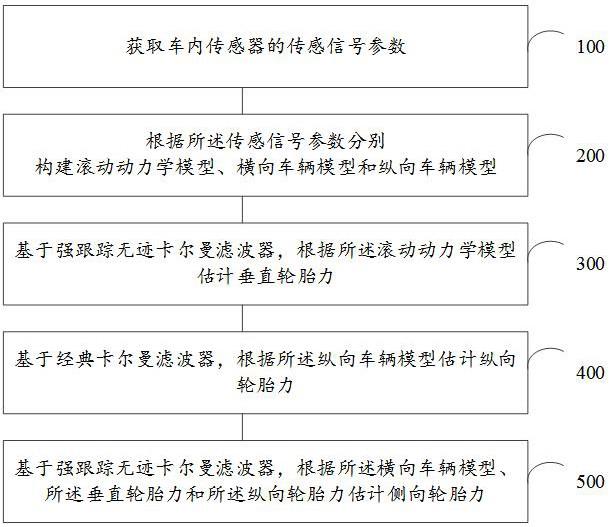
4、获取车内传感器的传感信号参数;所述传感信号参数包括悬架高度数据、惯性测量数据、方向盘角度数据、车辆信号数据和电机数据;
5、根据所述传感信号参数分别构建滚动动力学模型、横向车辆模型和纵向车辆模型;
6、基于强跟踪无迹卡尔曼滤波器,根据所述滚动动力学模型估计垂直轮胎力;
7、基于经典卡尔曼滤波器,根据所述纵向车辆模型估计纵向轮胎力;
8、基于强跟踪无迹卡尔曼滤波器,根据所述横向车辆模型、所述垂直轮胎力和所述纵向轮胎力估计侧向轮胎力。
9、一种四轮毂电机驱动全线控电动汽车轮胎力估计系统,包括:
10、参数获取模块,用于获取车内传感器的传感信号参数;所述传感信号参数包括悬架高度数据、惯性测量数据、方向盘角度数据、车辆信号数据和电机数据;
11、模型构建模块,用于根据所述传感信号参数分别构建滚动动力学模型、横向车辆模型和纵向车辆模型;
12、第一估计模块,用于基于强跟踪无迹卡尔曼滤波器,根据所述滚动动力学模型估计垂直轮胎力;
13、第二估计模块,用于基于经典卡尔曼滤波器,根据所述纵向车辆模型估计纵向轮胎力;
14、第三估计模块,用于基于强跟踪无迹卡尔曼滤波器,根据所述横向车辆模型、所述垂直轮胎力和所述纵向轮胎力估计侧向轮胎力。
15、根据本发明提供的具体实施例,本发明公开了以下技术效果:
16、本发明提供了一种四轮毂电机驱动全线控电动汽车轮胎力估计方法及系统,获取车内传感器的传感信号参数,包括悬架高度数据、惯性测量数据、方向盘角度数据、车辆信号数据和电机数据;分别根据传感信号参数构建滚动动力学模型、横向车辆模型和纵向车辆模型;基于强跟踪无迹卡尔曼滤波器,根据滚动动力学模型估计垂直轮胎力;基于经典卡尔曼滤波器,根据纵向车辆模型估计纵向轮胎力;基于强跟踪无迹卡尔曼滤波器,根据横向车辆模型、垂直轮胎力和纵向轮胎力估计侧向轮胎力。本发明利用低成本车载传感器信息,轮毂电机和线控制动系统状态反馈信息实现轮胎纵向、侧向和垂向轮胎估计力;使用强跟踪无迹卡尔曼滤波器估计轮胎侧向力和垂向力,较之传统的卡尔曼滤波器,在动态跟踪能力和收敛速度方面具有更好的性能;未使用参数繁多的轮胎模型进行轮胎力估计,估计算法精度高、鲁棒性好。
技术特征:
1.一种四轮毂电机驱动全线控电动汽车轮胎力估计方法,其特征在于,包括:
2.根据权利要求1所述的四轮毂电机驱动全线控电动汽车轮胎力估计方法,其特征在于,所述车内传感器包括:悬架高度传感器、惯性测量装置、轮毂电机、车辆信号传感器和方向盘角度传感器;所述悬架高度传感器用于测量悬架高度数据;所述惯性测量装置用于测量惯性测量数据;所述轮毂电机用于测量电机数据;所述车辆信号传感器用于测量车辆信号数据;所述方向盘角度传感器用于测量方向盘角度数据。
3.根据权利要求1所述的四轮毂电机驱动全线控电动汽车轮胎力估计方法,其特征在于,所述滚动动力学模型的构建方法为:
4.根据权利要求1所述的四轮毂电机驱动全线控电动汽车轮胎力估计方法,其特征在于,所述横向车辆模型的构建方法为:
5.根据权利要求1所述的四轮毂电机驱动全线控电动汽车轮胎力估计方法,其特征在于,所述纵向车辆模型的构建方法为:
6.根据权利要求3所述的四轮毂电机驱动全线控电动汽车轮胎力估计方法,其特征在于,所述基于强跟踪无迹卡尔曼滤波器,根据所述滚动动力学模型估计垂直轮胎力,包括:
7.根据权利要求5所述的四轮毂电机驱动全线控电动汽车轮胎力估计方法,其特征在于,所述基于经典卡尔曼滤波器,根据所述纵向车辆模型估计纵向轮胎力,包括:
8.根据权利要求4所述的四轮毂电机驱动全线控电动汽车轮胎力估计方法,其特征在于,基于强跟踪无迹卡尔曼滤波器,根据所述横向车辆模型、所述垂直轮胎力和所述纵向轮胎力估计侧向轮胎力,包括:
9.一种四轮毂电机驱动全线控电动汽车轮胎力估计系统,其特征在于,包括:
技术总结
本发明公开一种四轮毂电机驱动全线控电动汽车轮胎力估计方法及系统,涉及车辆安全控制技术领域,方法包括:获取车内传感器的传感信号参数;所述传感信号参数包括悬架高度数据、惯性测量数据、方向盘角度数据、车辆信号数据和电机数据;根据传感信号参数分别构建滚动动力学模型、横向车辆模型和纵向车辆模型;基于强跟踪无迹卡尔曼滤波器,根据滚动动力学模型估计垂直轮胎力;基于经典卡尔曼滤波器,根据纵向车辆模型估计纵向轮胎力;基于强跟踪无迹卡尔曼滤波器,根据横向车辆模型、垂直轮胎力和纵向轮胎力估计侧向轮胎力。本发明利用低成本车载传感器信息,轮毂电机和线控制动系统状态反馈信息实现轮胎纵向、侧向和垂向轮胎估计力。
技术研发人员:张雷,王震坡,丁晓林
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!