一种车辆起步控制方法、系统及相关组件与流程
本申请涉及自动驾驶领域,特别涉及一种车辆起步控制方法、系统及相关组件。
背景技术:
1、近年来,随着自动驾驶技术的发展,人们对自动驾驶车辆的舒适性和安全性提出了更高的要求。目前,自动驾驶车辆多采用驱动单元和制动单元解耦控制,自动驾驶车辆在坡道上停止后要起步时,如果驱动力和制动力衔接不好,会出现溜坡、起步过猛、长时间无法启动等问题,无法实现平顺起步,存在安全隐患。
2、因此,如何提供一种解决上述技术问题的方案是本领域技术人员目前需要解决的问题。
技术实现思路
1、本申请的目的是提供一种车辆起步控制方法、系统及相关组件,能够避免溜坡、起步过猛和长时间无法启动的问题,达到车辆在坡道上平顺起步的目的,保障车辆的行车安全。
2、为解决上述技术问题,本申请提供了一种车辆起步控制方法,应用于车辆,所述车辆包括驱动单元和制动单元,所述车辆起步控制方法包括:
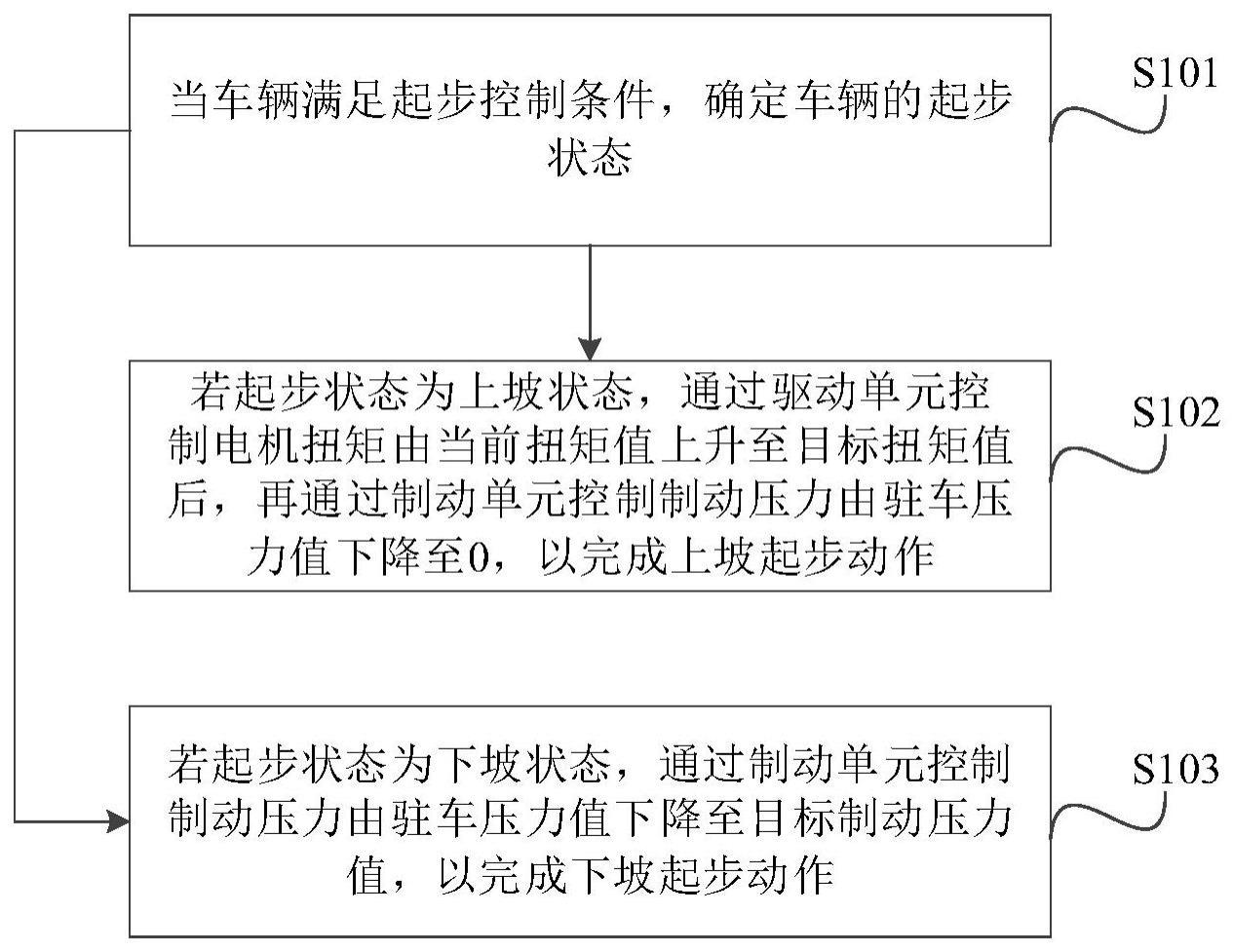
3、当所述车辆满足起步控制条件,确定所述车辆的起步状态;所述起步状态为上坡状态或下坡状态;
4、若所述起步状态为所述上坡状态,通过所述驱动单元控制电机扭矩由当前扭矩值上升至目标扭矩值后,再通过所述制动单元控制制动压力由驻车压力值下降至0,以完成上坡起步动作;
5、若所述起步状态为所述下坡状态,通过所述制动单元控制所述制动压力由驻车压力值下降至目标制动压力值,以完成下坡起步动作。
6、可选的,通过所述驱动单元控制电机扭矩由当前扭矩值上升至目标扭矩值之前,所述车辆起步控制方法还包括:
7、获取所述车辆的目标上坡起步加速度和车辆总传动比;
8、基于所述目标上坡起步加速度和所述车辆总传动比计算所述目标扭矩值。
9、可选的,获取所述车辆的目标上坡起步加速度的过程包括:
10、确定所述车辆的当前停车场景;当前停车场景为行驶前方存在目标车辆的第一停车场景或行驶前方不存在所述目标车辆的第二停车场景;
11、若当前停车场景为所述第一停车场景,根据所述车辆和所述目标车辆的相对距离和相对速度确定目标上坡起步加速度;
12、若当前停车场景为所述第二停车场景,根据设定车速按照定速巡航确定所述目标上坡起步加速度。
13、可选的,通过所述制动单元控制制动压力由驻车压力值下降至0的过程包括:
14、获取第一泄压斜率;
15、通过所述制动单元控制制动压力按所述第一泄压斜率由驻车压力值下降至0。
16、可选的,所述获取第一泄压斜率的过程包括:
17、获取所述驻车压力值、目标上坡起步时间、所述电机扭矩由当前扭矩值上升至所述目标扭矩值的第一时间以及电子液压制动系统的第一响应延迟时间;
18、基于所述驻车压力值、所述目标上坡起步时间、所述第一时间和所述第一响应延迟时间计算最优上坡泄压斜率;
19、根据所述最优上坡泄压斜率和所述电子液压制动系统的最大泄压斜率确定第一泄压斜率。
20、可选的,通过所述制动单元控制所述制动压力由驻车压力值下降至目标制动压力值之前,该车辆起步控制方法还包括:
21、获取所述车辆所在路面的坡度值和目标下坡起步加速度;
22、根据所述坡度值和所述目标下坡起步加速度计算所述目标制动压力值。
23、可选的,通过所述制动单元控制所述制动压力由驻车压力值下降至目标制动压力值,以完成下坡起步动作的过程包括:
24、当所述制动压力未达到目标制动压力值时,通过所述制动单元的开环控制模式控制所述制动压力由驻车压力值下降至目标制动压力值;
25、当所述制动压力达到所述目标制动压力值后,通过所述制动单元的闭环控制模式调节所述制动压力,以完成下坡起步动作。
26、可选的,通过所述制动单元的开环控制模式控制所述制动压力由驻车压力值下降至目标制动压力值的过程包括:
27、获取第二泄压斜率;
28、通过所述制动单元控制所述制动压力按所述第二泄压斜率由驻车压力值下降至目标制动压力值。
29、可选的,所述获取第二泄压斜率的过程包括:
30、获取驻车压力值、目标制动压力值、下坡目标起步时间和电子液压制动系统的第一响应延迟时间;
31、基于所述驻车压力值、所述目标制动压力值、所述下坡目标起步时间和所述第一响应延迟时间计算最优下坡泄压斜率;
32、根据所述最优下坡泄压斜率和所述电子液压制动系统的最大泄压斜率确定第二泄压斜率。
33、为解决上述技术问题,本申请还提供了一种车辆起步控制系统,应用于车辆,所述车辆包括驱动单元和制动单元,所述车辆起步控制系统包括:
34、第一确定模块,用于当所述车辆满足起步控制条件,确定所述车辆的起步状态;所述起步状态为上坡状态或下坡状态;
35、第一控制模块,用于在所述起步状态为所述上坡状态,通过所述驱动单元控制电机扭矩由当前扭矩值上升至目标扭矩值后,再通过所述制动单元控制制动压力由驻车压力值下降至0,以完成上坡起步动作;
36、第二控制模块,用于在所述起步状态为所述下坡状态,通过所述制动单元控制所述制动压力由驻车压力值下降至目标制动压力值,以完成下坡起步动作。
37、为解决上述技术问题,本申请还提供了一种电子设备,包括:
38、存储器,用于存储计算机程序;
39、处理器,用于执行所述计算机程序时实现如上文任意一项所述的车辆起步控制方法的步骤。
40、为解决上述技术问题,本申请还提供了一种车辆,包括如上文所述的电子设备。
41、为解决上述技术问题,本申请还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上文任意一项所述的车辆起步控制方法的步骤。
42、本申请提供了一种车辆起步控制方法,车辆在上坡场景起步时,通过驱动单元控制电机扭矩达到目标扭矩值后,再通过制动单元控制驻车压力消退,在下坡场景起步时,仅通过制动单元控制制动压力由驻车压力值下降至可完成下坡起步动作的目标制动压力值,实现对制动压力的精准控制,从而避免溜坡、起步过猛和长时间无法启动的问题,本申请通过对驱动单元和制动单元的协调控制,达到车辆在坡道上平顺起步的目的,保障车辆的行车安全。本申请还提供了一种车辆起步控制系统、电子设备、车辆及计算机可读存储介质,具有和上述车辆起步控制方法相同的有益效果。
技术特征:
1.一种车辆起步控制方法,其特征在于,应用于车辆,所述车辆包括驱动单元和制动单元,所述车辆起步控制方法包括:
2.根据权利要求1所述的车辆起步控制方法,其特征在于,通过所述驱动单元控制电机扭矩由当前扭矩值上升至目标扭矩值之前,所述车辆起步控制方法还包括:
3.根据权利要求2所述的车辆起步控制方法,其特征在于,获取所述车辆的目标上坡起步加速度的过程包括:
4.根据权利要求1所述的车辆起步控制方法,其特征在于,通过所述制动单元控制制动压力由驻车压力值下降至0的过程包括:
5.根据权利要求4所述的车辆起步控制方法,其特征在于,所述获取第一泄压斜率的过程包括:
6.根据权利要求1所述的车辆起步控制方法,其特征在于,通过所述制动单元控制所述制动压力由驻车压力值下降至目标制动压力值之前,该车辆起步控制方法还包括:
7.根据权利要求1-6任意一项所述的车辆起步控制方法,其特征在于,通过所述制动单元控制所述制动压力由驻车压力值下降至目标制动压力值,以完成下坡起步动作的过程包括:
8.根据权利要求7所述的车辆起步控制方法,其特征在于,通过所述制动单元的开环控制模式控制所述制动压力由驻车压力值下降至目标制动压力值的过程包括:
9.根据权利要求8所述的车辆起步控制方法,其特征在于,所述获取第二泄压斜率的过程包括:
10.一种车辆起步控制系统,其特征在于,应用于车辆,所述车辆包括驱动单元和制动单元,所述车辆起步控制系统包括:
11.一种电子设备,其特征在于,包括:
12.一种车辆,其特征在于,包括如权利要求11所述的电子设备。
13.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1-9任意一项所述的车辆起步控制方法的步骤。
技术总结
本申请公开了一种车辆起步控制方法、系统及相关组件,涉及自动驾驶领域,该车辆起步控制方法包括:当车辆满足起步控制条件,确定车辆的起步状态;起步状态为上坡状态或下坡状态;若起步状态为上坡状态,通过驱动单元控制电机扭矩由当前扭矩值上升至目标扭矩值后,再通过制动单元控制制动压力由驻车压力值下降至0,以完成上坡起步动作;若起步状态为下坡状态,通过制动单元控制制动压力由驻车压力值下降至目标制动压力值,以完成下坡起步动作。本申请能够避免溜坡、起步过猛和长时间无法启动的问题,达到车辆在坡道上平顺起步的目的,保障车辆的行车安全。
技术研发人员:张喆
受保护的技术使用者:知行汽车科技(苏州)股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!