履带车辆、所述车辆的控制方法和计算机程序与流程
本发明涉及一种特别是用于准备滑雪道的履带车辆。
背景技术:
1、总体上,上述类型的履带车辆包括框架;安装在框架上的驾驶室;安装在框架上的推进系统;由推进系统驱动的驱动轮;以及由推进系统驱动的工具。
2、通常,所述履带车辆的推进系统包括内燃机、进给泵、被构造为将内燃机的动力传递给进给泵的机械传动装置以及由进给泵驱动并且被构造为驱动驱动轮和工具的液压致动器。在这种构造中,内燃机排出污染废气。履带车辆的另一个已知缺陷是由于难以控制内燃机的动力输出而导致能量效率较差,使得内燃机不考虑履带车辆的能量需求在最大效率点工作。
3、近几十年来,对减少全球污染的日益关注引起了电动车辆的发展。
4、总体上,电动推进系统允许在不排放污染气体的情况下进行高效的能量传递,但是其缺点是使车辆的结构失衡,因而需要重新设计车辆的框架和结构部件。因此,设计和构造具有电动推进系统的车辆的成本是极高的。电动车辆还对车辆维护提出新的要求。
技术实现思路
1、本发明的一个目的是提供一种减少了现有技术的缺陷的特别是用于准备滑雪道的履带车辆;特别地,本发明的一个目的是提供一种上述类型的履带车辆,其是环境友好的并且在设计、构造和维护方面简单且便宜。
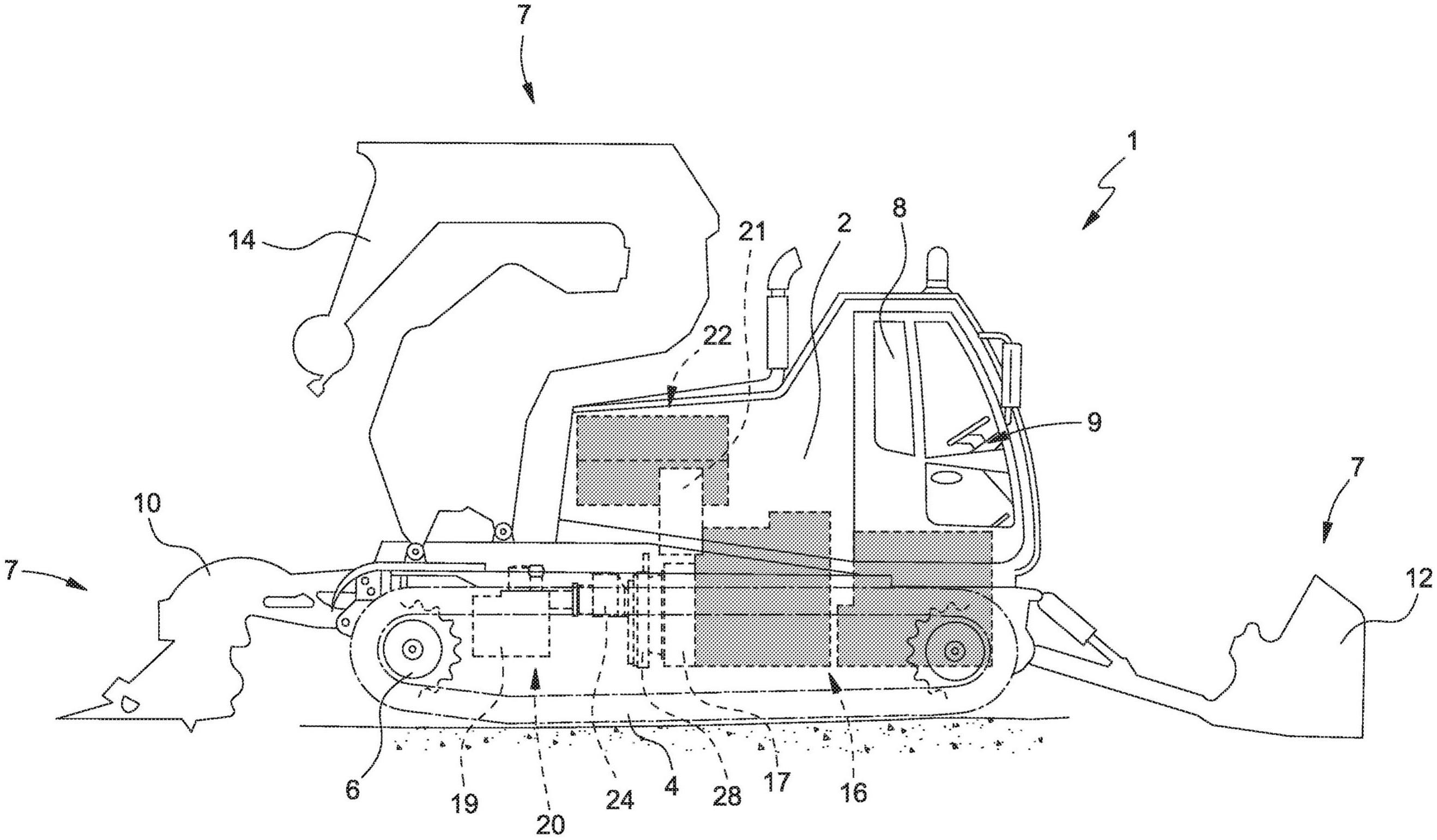
2、根据本发明,实现了一种特别是用于准备滑雪道的履带车辆,该履带车辆包括:
3、框架;
4、安装在框架上的驾驶室;
5、分别由第一液压马达和第二液压马达驱动的第一驱动轮和第二驱动轮;
6、电池组件和由电池组件供电的电动马达,它们在驾驶室的后方并且主要在驾驶室的下方安装在框架上;以及
7、被构造为将动力从电动马达传递给液压马达的动力传递组件。
8、借助于本发明,动力传递是十分有效的并且不会排放污染气体,同时也极大地限制了电动马达和电池组件对履带车辆的结构特征的影响。以这种方式,可使用为当前已知的内燃机履带车辆开发的框架。因此,减少了履带车辆的框架的设计成本。
9、特别地,电动马达和电池组件的布置允许通过与内燃机和燃料箱类似的方式将履带车辆的重心保持较低,从而特别是在履带车辆沿着斜坡前进时优化履带车辆的性能。另外,用于驱动轮的动力传递组件不会产生任何特别的维护问题。
10、特别地,履带车辆包括至少一个工具,其以可动的方式连接至框架并且由相应的另外的液压马达驱动。
11、以这种方式,至少一个工具经由动力传递组件通过电动马达驱动。
12、特别地,动力传递组件包括液压地连接至第一液压马达的第一泵;液压地连接至第二液压马达的第二泵;液压地连接至相应的另外的液压马达的至少一个第三泵;以及机械传动装置,其设置在电动马达与泵之间并且被构造为在泵之间分配电动马达输送的动力,泵是可变排量泵。
13、以这种方式,每个泵都由电动马达驱动并且反过来供应相应的液压设备。另外,借助于机械传动装置,在使用中由电动马达输送的动力根据特定的操作需求被分配在泵之间,从而减少能量消耗并且提高电池组件的使用寿命。
14、特别地,履带车辆包括辅助供能组件,其特别是燃料电池或内燃机或另外的电池组件。
15、更详细地,辅助供能组件被构造为对电池组件进行充电并且可从履带车辆移除。
16、这在需要时能够在电池组件没电时延长履带车辆的操作持续时间。
17、特别地,电池组件优选通过可拆卸的耦合装置被可分离地耦合至履带车辆,从而帮助更换电池组件并且限制履带车辆的停机时间。换句话说,可以移除没电的电池组件并且用另一个预先充好电的电池组件替换,以允许履带车辆在无需等待被移除的电池组件的充电时间的情况下恢复操作。
18、特别地,履带车辆包括被构造为控制电动马达输送的动力的控制装置。
19、控制装置被构造为独立地控制电动马达的速度和泵的排量,以优化履带车辆的操作效率。
20、以这种方式,能够改变电动马达的速度和泵的排量二者,从而在特定操作需求下在泵的最大效率点操作并同时确保液压马达的动力供应。
21、特别地,控制装置被构造为获得电动马达的速度和泵的排量,并且相应地根据获得的电动马达的速度以及获得的泵的排量通过相应的闭环控制来控制电动马达的速度和泵的排量。
22、以这种方式,电动马达的速度和泵的排量被快速且准确地调节。
23、特别地,控制装置被构造为获得每个液压马达的要求的液压动力;控制电动马达的速度和/或相应的泵的排量来满足要求的液压动力;并且获得输送给每个液压马达的液压动力。
24、以这种方式,进一步提高了履带车辆的能量效率并且可以通过第一闭环来控制所输送的液压动力。
25、特别地,控制装置被构造为获得履带车辆的要求的行驶速度;控制电动马达的速度和/或泵的排量来基本上匹配要求的行驶速度;并且获得履带车辆的行驶速度。
26、以这种方式,可以通过第二闭环准确控制履带车辆的行驶速度。
27、特别地,控制装置包括被构造为获得电池组件的充电量的充电传感器,控制装置被构造为在获得的充电量低于预定阈值时限制电动马达的输送的动力,从而增加履带车辆的操作持续时间和/或允许履带车辆到达充电站。
28、特别地,控制装置被构造为基于获得的充电量以及履带车辆的预期平均消耗来计算并提供履带车辆的剩余操作时间。
29、以这种方式,可以预估履带车辆的剩余操作时间并且可以通知控制履带车辆的操作者。
30、特别地,控制装置被构造为基于获得的充电量、履带车辆的预期平均消耗以及履带车辆的gps位置、滑雪道的积雪特性和履带车辆的操作者的驾驶风格中的至少一项来计算并提供最大操作距离。
31、以这种方式,可以准确预估履带车辆的最大操作距离。
32、本发明的另一个目的是提供一种减少了此处强调的现有技术的缺陷的控制履带车辆的方法。
33、根据本发明,提供了一种控制履带车辆的方法;该履带车辆包括框架;由相应的液压马达驱动的两个驱动轮;电池组件和由电池组件供电的电动马达;连接至框架并且由相应的另外的液压马达驱动的至少一个工具;以及包括多个可变排量泵且被构造为将动力从电动马达传递给液压马达的动力传递组件,所述方法包括独立地控制电动马达的速度和泵的排量的步骤,以优化履带车辆的操作效率。
34、以这种方式,能够改变马达的速度和泵的排量二者,从而在泵的最大效率点工作并同时确保特定操作需求所要求的动力。
35、换句话说,提供给液压马达的动力通过调节两个彼此独立的参数(电动马达的速度和泵的排量)来控制,从而减少履带车辆的能量消耗并增加电池组件充电的持续时间。
36、例如,由于电动马达的力矩曲线恒定地处于阈值以下,因此能够将电动马达的速度改变到阈值以下,以优化其中一个泵的效率并同时使电动马达的力矩保持恒定。
37、本发明的另一个目的是提供一种减少了此处强调的现有技术的缺陷的计算机程序。
38、根据本发明,提供了一种被构造为控制履带车辆的计算机程序,其可直接在计算机的存储器中加载,以在通过计算机运行程序时执行上述的方法的步骤。
39、借助于所述程序,可以容易且经济地实施所述方法。
40、另外,本发明涉及一种程序产品,其包括存储有所述程序的可读介质。
- 还没有人留言评论。精彩留言会获得点赞!