一种基于优化算法的混动汽车能量管理方法
本发明涉及混合动力汽车能量管理,特别涉及一种基于优化算法的混动汽车能量管理方法。
背景技术:
1、目前市场上量产的hev整车实时控制器多是基于规则的控制,并非最优控制,需要依赖专家经验且策略复杂,需调整大量的控制参数,因此标定工作量很大。基于优化控制理论(ecms或者pmp)的能量管理策略多是解决一个电机的混合动力汽车(增程混动(reev)或者p2架构的hev)。
2、因此,在现有hev整车实时控制技术的基础上,如何减少能量管理控制系统控制参数的标定工作量,提供简单有效的模型和快速优化算法,成为本领域技术人员亟需解决的问题。
技术实现思路
1、鉴于上述问题,本发明提出了一种至少解决上述部分技术问题的基于优化算法的混动汽车能量管理方法,该方法可精确求解p1+p3结构的混合动力汽车能量管理问题,并且在更新升级车辆整车电控系统时最大化避免手动调整控制参数。
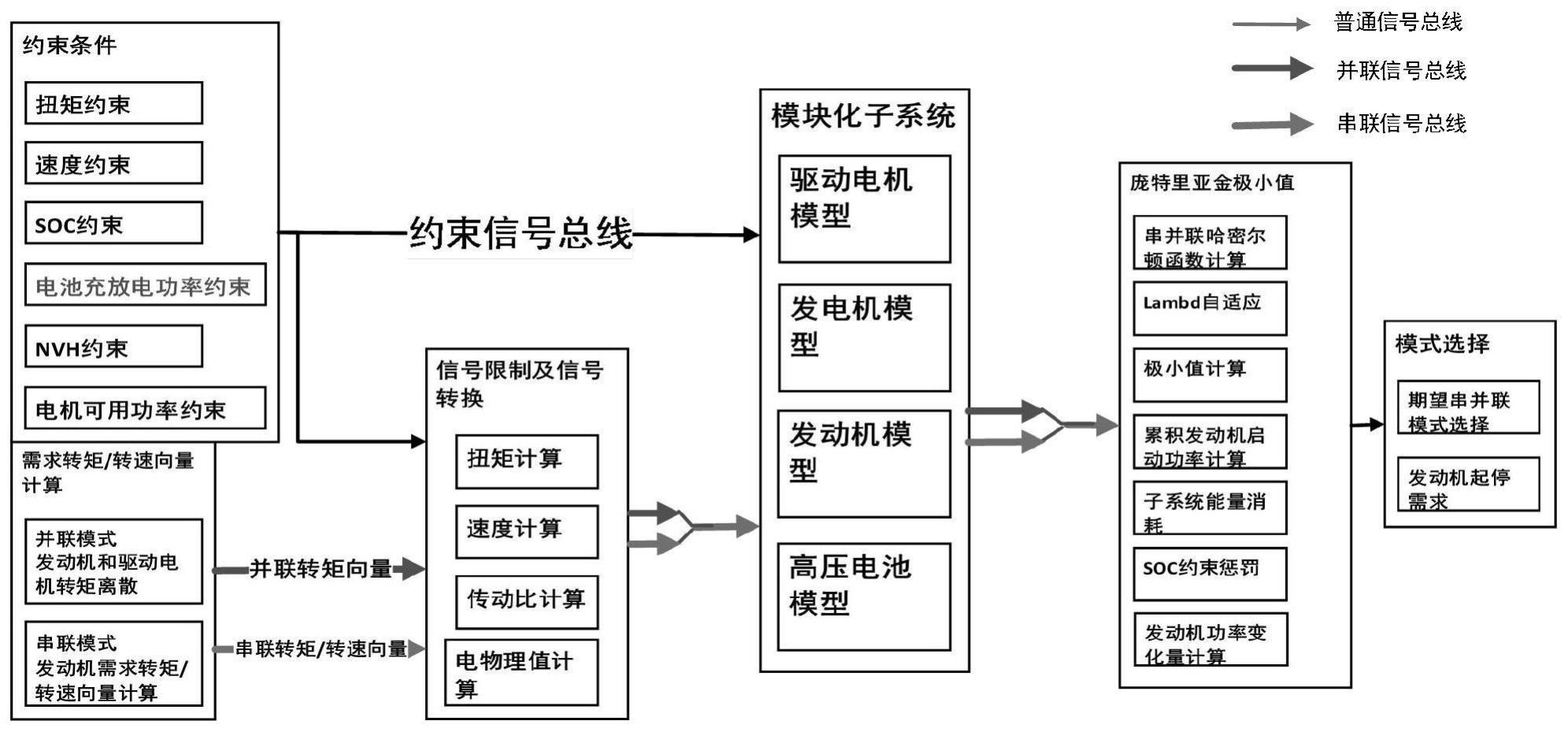
2、本发明实施例提供一种基于优化算法的混动汽车能量管理方法,包括:
3、对并联模式下混动汽车的发动机期望转矩和驱动电机期望转矩进行离散化;对串联模式下混动汽车的发动机期望转矩进行离散化并计算发动机期望转速和驱动电机期望转矩;
4、通过各种约束条件确定发动机期望转矩和期望转速,以及驱动电机期望转矩的控制域范围;
5、计算混动汽车的不同层级的信号,并且提供观测量;所述不同层级包括:电机层、发动机层、变速器层和车轮层;
6、通过各个模块化的子系统模型计算各个子系统的能量损耗;所述子系统模型包括:发动机子系统模型、电机子系统模型和动力电池模型;
7、建立系统状态方程,根据各子系统的能量损耗,并且控制发动机启机次数最小、发动机转矩波动最小、串联发动机转速波动最小,建立复合目标函数;对于每一个控制候选项,根据约束条件,分别计算能量消耗和,选择控制值并使得所述控制值最小;
8、选择期望模式,并计算发动机启停需求,完成混动汽车能量管理。
9、进一步地,通过车轮层需求转矩乘以传动比减去驱动电机的期望转矩得到所述并联模式下混动汽车的发动机期望转矩。
10、进一步地,所述发动机子系统模型包括:
11、发动机输入输出功率关系:
12、fe(ωe(t))ue(t)+ee(ωe(t))+ye(t)=0
13、其中,ee(ωe(t))为发动机输入功率与输出功率之间的误差;ue(t)为发动机子系统功率输入;ηe为发动机效率;ωe(t)为发动机转速;qlhv为燃油低热值;ye(t)为发动机子系统输出功率;
14、输入输出功率为:
15、
16、其中,ηg为发电机的效率;tg(t)为发电机转矩;ωg(t)为发电机转速;为发电机转速;yg为发电机子系统输出功率;ug为发电机子系统输入功率。
17、进一步地,所述动力电池模型包括:
18、输入输出功率关系为:
19、
20、其中,为动力电池的能量消耗功率;uh(t)为动力电池子系统输入功率;yh(t)为动力电池子系统输出功率;
21、状态方程表示为:
22、
23、其中,ηh为充放电效率;yd(t)为驱动电机输出功率;yg(t)为发电机输出功率;v2为动力系统电负载功率。
24、进一步地,所述系统状态方程为:
25、
26、其中,ηh为充放电效率;yd(t)为驱动电机输出功率;yg(t)为发电机输出功率;v2为动力系统电负载功率。
27、进一步地,所述复合目标函数为:
28、
29、其中,n={e,d,g,h,br};t0为初始时刻;tf为终止时刻;un(t)为子系统输入功率向量;yn(t)为子系统输出功率向量;为启动次数系数;tclnt为发动机冷却液温度;ωstrt为发动机启机转速;nstrt为发动机启机转速向量;为转矩/转速波动系数;ue为发动机输入功率向量;te(k)为发动机期望转矩向量;ne(k)为发动机期望转速向量;ue_act(k-1)为发动机上一拍实际功率;为离合器状态求反;te_act(k)为发动机实际转矩。
30、进一步地,所述约束条件包括:
31、速度约束:
32、ωm_min≤ωm≤ωm_max
33、0≤ωe≤ωe_max
34、其中,ωm_min为电机最小转速;ωm为电机转速;ωm_max为电机最大转速;ωe为发动机转速;ωe_max为发动机最大转速;
35、转矩约束:
36、tm_min≤tm≤tm_max
37、te_min≤te≤te_max
38、其中,tm_min为电机最小转矩;tm为电机转矩;tm_max为电机最大转矩;te_min为发动机最小转矩;te为发动机转矩;te_max为发动机最大转矩;
39、soc约束:
40、socmin≤soc(x)≤socmax
41、soc(n)-soc(0)=δsoc
42、其中,socmin为最下soc;soc(x)为当前soc;socmax为最大soc;soc(n)为终值soc;soc(0)为初始值soc;δsoc为soc变化量。
43、进一步地,所述约束条件还包括:
44、电池充放电功率约束:
45、pchg_min≤pchg≤pchg_max
46、pdis_min≤pdis≤pdis_max
47、其中,pchg_min为动力电池最小充电功率;pchg为动力电池当前充电功率;pchg_max为动力电池最大放电功率;pdis_min为动力电池最小放电功率;pdis为动力电池当前放电功率;pdis_max为动力电池最大放电功率;
48、发动机的噪音约束:
49、nvhmin≤nvh≤nvhmax
50、其中,nvhmin为发动机最小nvh;nvh为当前发动机nvh;nvhmax为发动机最大nvh;
51、电机可用功率约束:
52、pm_avlmin≤pm≤pm_avlmax
53、其中,pm_avlmin为电机可用最小功率;pm为当前电机功率;pm_avlmax为电机可用最大功率。
54、进一步地,还包括:
55、根据庞特里亚金极小值原理,通过求解哈密尔顿函数的最小值得到最优控制输入。
56、进一步地,所述期望模式为:
57、混动汽车的发动机不启动则为ev模式;
58、如果串联hs<并联hp,则为串联模式,否则为并联模式。
59、本发明实施例提供的上述技术方案的有益效果至少包括:
60、本发明实施例提供的一种基于优化算法的混动汽车能量管理方法,包括:对并联模式下混动汽车的发动机期望转矩和驱动电机期望转矩进行离散化;对串联模式下混动汽车的发动机期望转矩进行离散化并计算发动机期望转速和驱动电机期望转矩;通过各种约束条件确定发动机期望转矩和期望转速,以及驱动电机期望转矩的控制域范围;计算混动汽车的不同层级的信号,并且提供观测量;通过各个模块化的子系统模型计算各个子系统的能量损耗;对于每一个控制候选项,根据约束条件,分别计算能量消耗和,选择最优控制值,该值对应最小能量损耗;选择期望模式,并计算发动机启停需求,完成混动汽车能量管理。该方法可匹配不同的拓扑结构,在更新升级车辆整车电控系统时最大化避免手动调整控制参数。
61、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
62、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!