一种移动机器人的转向悬架机构及其控制方法与流程
本发明涉及机器人转向,具体的说是一种移动机器人的转向悬架机构及其控制方法。
背景技术:
1、未来5年,预计中国每年将减少1000万劳动力,劳动力短缺将成为常态。与此同时,社会经济对劳动力的需求持续扩张,工资成本将越来越高。社会需求推动机器人产业快速的发展,机器人取代人工将是一个社会发展趋势。
2、现阶段,机器人广泛适用于室外道路、园区等复杂路况环境,为了使机器人适应各种复杂的环境,人们设计多种机器人的转动方法,常见的转动方法有:给机器人预设转动关节,通过高耗能电机控制转动关节转动达到控制机器人转动的目的。
3、但是,传统的通过转动关节控制机器人转动的方法对室外复杂环境的适应性差、功率消耗大以及稳定性差。
技术实现思路
1、本发明针对目前技术发展的需求和不足之处,提供一种移动机器人的转向悬架机构及其控制方法。
2、首先,本发明提供一种移动机器人的转向悬架机构,解决上述技术问题采用的技术方案如下:
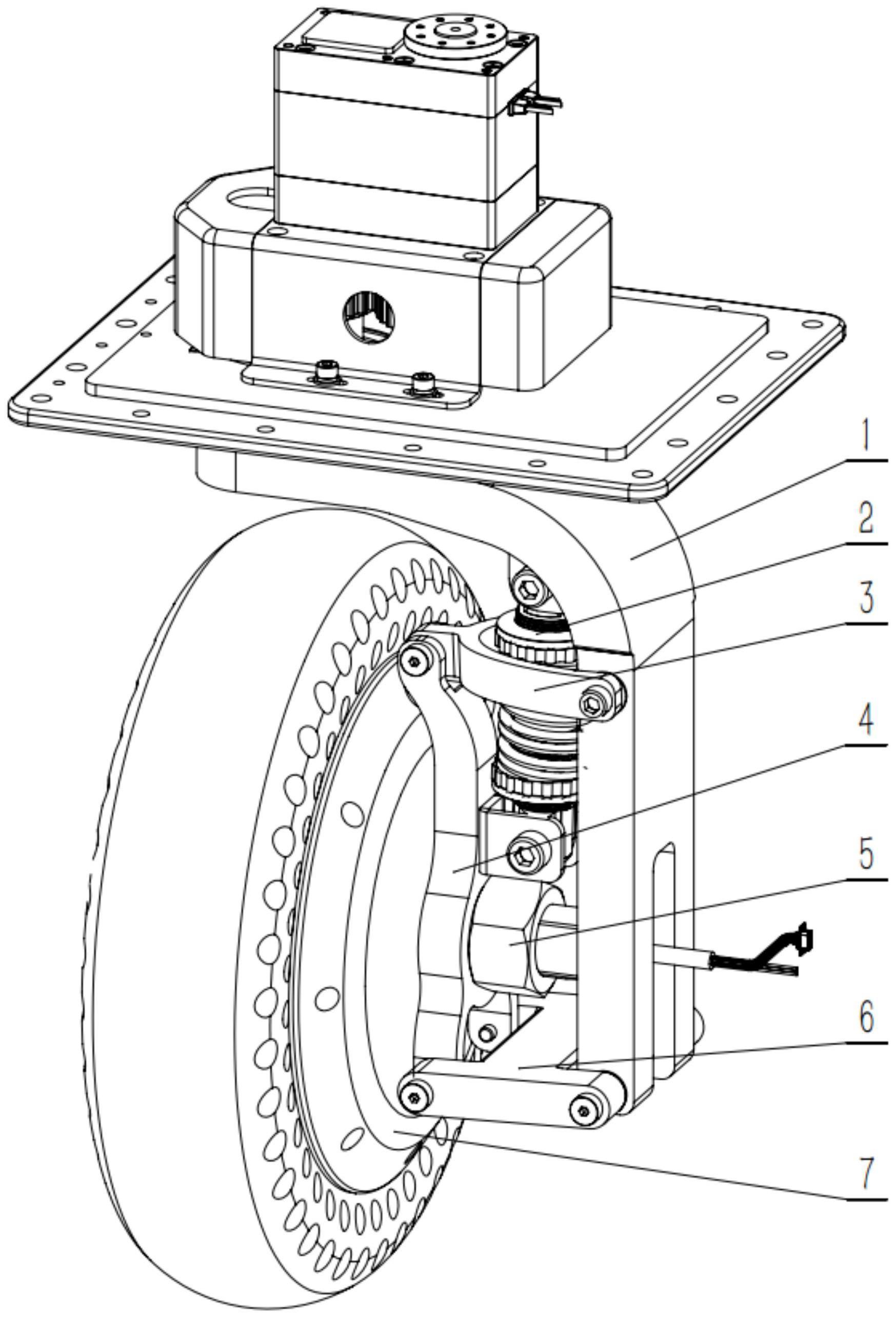
3、一种移动机器人的转向悬架机构,其包括悬架部分和转向部分;
4、所述悬架部分包括转动侧板、轮毂节、上叉臂、下叉臂、减震器,其中:
5、转动侧板竖直放置,转动侧板表面开设有长腰孔,且转动侧板上部向左水平折弯;
6、轮毂节设置于车轮侧部,车轮自带轮毂电机和轮轴,车轮的轮轴穿过轮毂节后连接有锁紧螺母,车轮的轮轴穿过锁紧螺母后由转动侧板表面开设的长腰孔向外伸出;
7、上叉臂和下叉臂上下平行放置,且上叉臂左端铰接连接轮毂节上端,上叉臂右端铰接连接转动侧板上端的未折弯位置,下叉臂左端铰接连接轮毂节下端,下叉臂右端铰接连接转动侧板下端;
8、减震器位于转动侧板的折弯位置,且减震器向上铰接连接转动侧板的折弯内侧面,减震器向下穿过上叉臂后铰接连接轮毂节;
9、所述转向部分包括电机支架、转向电机、法兰盘、齿轮传动组件,其中:
10、电机支架固定连接机器人,转向电机固定于电机支架,且转向电机的电机轴向下穿过电机支架后通过法兰盘连接有齿轮传动组件,齿轮传动组件的输出端固定连接转动侧板。
11、可选的,轮毂节为上窄下宽的板状结构,轮毂节的中部偏下位置开设有通孔,车轮的轮轴穿过轮毂节的通孔后连接有锁紧螺母。
12、可选的,上叉臂为水平放置的y型结构,上叉臂的y型底端铰接连接轮毂节上端,上叉臂的y型开口端套设于转动侧板上端外侧,且上叉臂的y型开口端部铰接连接转动侧板上端的未折弯位置;
13、减震器向上铰接连接转动侧板的折弯内侧面,减震器向下穿过上叉臂的y型开口与转动侧板连接后形成的封闭环形后铰接连接轮毂节。
14、可选的,下叉臂为水平放置的工字型结构,下叉臂的工字型左侧套设在轮毂节下端外侧,且下叉臂的左侧两端部铰接连接轮毂节下端,下叉臂的工字型右侧套设在转动侧板下端外侧,且下叉臂的右侧两端部铰接连接转动侧板下端。
15、可选的,齿轮传动组件包括连接轴一、连接轴二、主动齿轮、从动齿轮、轴承ⅰ、轴承ⅱ、底板,其中:
16、连接轴一竖直放置,连接轴一下端固定于底板,连接轴一上端通过轴承ⅰ连接主动齿轮,主动齿轮上部连接法兰盘,主动齿轮侧面外啮合从动齿轮;
17、连接轴二竖直放置,连接轴二上端固定连接从动齿轮,连接轴二向下连接有轴承ⅱ,且连接轴二向下穿过轴承ⅱ后通过花键连接转动侧板,轴承ⅱ内圈通过螺栓与转动侧板固定连接,轴承ⅱ外圈通过螺栓与底板固定连接。
18、优选的,主动齿轮和从动齿轮具有相同的齿数。
19、其次,本发明提供一种移动机器人的转向悬架机构控制方法,解决上述技术问题采用的技术方案如下:
20、一种移动机器人的转向悬架机构控制方法,其控制过程包括如下步骤:
21、步骤1、检测控制车轮转动的预设条件是否被触发,当预设条件被触发时,确定控制信号;
22、步骤2、机器人的转向部分接收机器人控制装置发送的转向信号;
23、步骤3、转向部分的转动电机根据转向信号控制悬架部分的转动侧板进行转动,以带动车轮转动;
24、步骤4、在人车轮转动或行驶过程中,通过轮毂节、上叉臂、下叉臂三者的连接关系以及减震器吸收机器人车轮传递的振动。
25、可选的,移动机器人具有至少三个车轮,每个车轮对应安装有转向悬架机构;
26、机器人的控制装置向其所拥有车轮的转向部分同时发送转向信号。
27、本发明的一种移动机器人的转向悬架机构及其控制方法,与现有技术相比具有的有益效果是:
28、(1)本发明可以实现车轮原地转动360°,具有高可靠性和稳定性,拓展了机器人在室外环境性不同路况的适应能力,丰富了机器人的应用场景;
29、(2)本发明广泛适用于室外道路、园区等复杂路况环境,能够应用于园区巡检、配送、物流搬运、仓库配送、移动销售等行业,产品通用化高,安全可靠性强,能显著的提高智能化、自动化程度,具有很高的应用前景,产品上市能为公司带来可观的收益。
技术特征:
1.一种移动机器人的转向悬架机构,其特征在于,其包括悬架部分和转向部分;
2.根据权利要求1所述的一种移动机器人的转向悬架机构,其特征在于,轮毂节为上窄下宽的板状结构,轮毂节的中部偏下位置开设有通孔,车轮的轮轴穿过轮毂节的通孔后连接有锁紧螺母。
3.根据权利要求1所述的一种移动机器人的转向悬架机构,其特征在于,上叉臂为水平放置的y型结构,上叉臂的y型底端铰接连接轮毂节上端,上叉臂的y型开口端套设于转动侧板上端外侧,且上叉臂的y型开口端部铰接连接转动侧板上端的未折弯位置;
4.根据权利要求1所述的一种移动机器人的转向悬架机构,其特征在于,下叉臂为水平放置的工字型结构,下叉臂的工字型左侧套设在轮毂节下端外侧,且下叉臂的左侧两端部铰接连接轮毂节下端,下叉臂的工字型右侧套设在转动侧板下端外侧,且下叉臂的右侧两端部铰接连接转动侧板下端。
5.根据权利要求1所述的一种移动机器人的转向悬架机构,其特征在于,所述齿轮传动组件包括连接轴一、连接轴二、主动齿轮、从动齿轮、轴承ⅰ、轴承ⅱ、底板,其中:
6.根据权利要求5所述的一种移动机器人的转向悬架机构,其特征在于,主动齿轮和从动齿轮具有相同的齿数。
7.一种如权利要求1-6所述转向悬架机构的控制方法,其特征在于,其控制过程包括如下步骤:
8.根据权利要求7所述的转向悬架机构控制方法,其特征在于,移动机器人具有至少三个车轮,每个车轮对应安装有转向悬架机构;
技术总结
本发明公开一种移动机器人的转向悬架机构,涉及机器人转向技术领域,其包括悬架部分和转向部分;悬架部分包括转动侧板、轮毂节、上叉臂、下叉臂,其中:转动侧板表面开设有长腰孔;车轮自带轮毂电机和轮轴,车轮轮轴穿过轮毂节后连接有锁紧螺母并由转动侧板的长腰孔向外伸出;上叉臂和下叉臂上下平行放置,且上下叉臂的端部对应连接轮毂节和转动侧板;转向部分包括电机支架、转向电机、法兰盘、齿轮传动组件,电机支架固定连接机器人,转向电机固定于电机支架,且转向电机的电机轴向下穿过电机支架后通过法兰盘连接有齿轮传动组件,齿轮传动组件的输出端固定连接转动侧板。本发明还公开转向悬架机构的控制方法,可以实现车轮原地转动360°。
技术研发人员:孔强
受保护的技术使用者:山东新一代信息产业技术研究院有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!