基于FOC算法的变速变矩共轴反桨涵道装置控制方法及系统
本发明涉及共轴反桨涵道装置,特别是基于foc算法的变速变矩共轴反桨涵道装置控制方法及系统。
背景技术:
1、目前,小型无人气垫船采用共轴反桨涵道装置,传统的共轴反桨涵道装置中螺旋正桨和螺旋反桨的相互转动会产生反扭,即使螺旋正桨和螺旋反桨处于相同转速,但由于涵道管的存在,流经螺旋正桨和螺旋反桨的气体流速不同,造成螺旋正桨和螺旋反桨产生的反扭大小不同,进而使整个共轴反桨涵道装置的扭矩不能相互抵消,造成气垫船机体自转。
技术实现思路
1、针对上述缺陷,本发明提出了基于foc算法的变速变矩共轴反桨涵道装置控制方法及系统,其目的在于解决传统的共轴反桨涵道装置由于涵道管的存在,流经螺旋正桨和螺旋反桨的气体流速不同,造成螺旋正桨和螺旋反桨产生的反扭大小不同,进而使整个共轴反桨涵道装置的扭矩不能相互抵消,造成气垫船机体自转的问题。
2、为达此目的,本发明采用以下技术方案:
3、基于foc算法的变速变矩共轴反桨涵道装置控制方法,包括以下步骤:
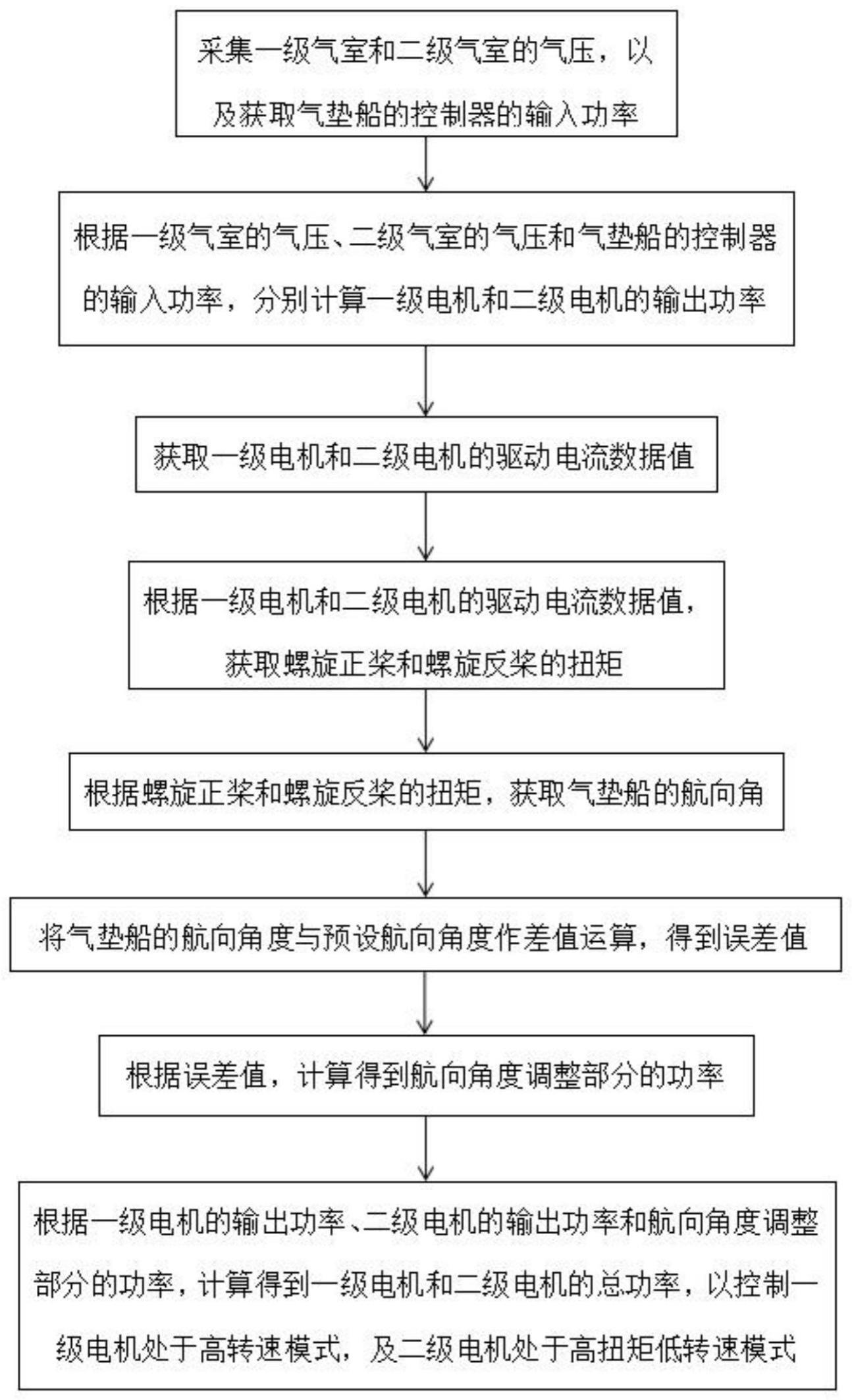
4、步骤s1:采集一级气室和二级气室的气压,以及获取气垫船的控制器的输入功率;
5、步骤s2:根据一级气室的气压、二级气室的气压和气垫船的控制器的输入功率,分别计算一级电机和二级电机的输出功率;
6、步骤s3:获取一级电机和二级电机的驱动电流数据值;
7、步骤s4:根据一级电机和二级电机的驱动电流数据值,获取螺旋正桨和螺旋反桨的扭矩;
8、步骤s5:根据螺旋正桨和螺旋反桨的扭矩,获取气垫船的航向角度;
9、步骤s6:将气垫船的航向角度与预设航向角度作差值运算,得到误差值;
10、步骤s7:根据误差值,计算得到航向角度调整部分的功率;
11、步骤s8:根据一级电机的输出功率、二级电机的输出功率和航向角度调整部分的功率,计算得到一级电机和二级电机的总功率,以控制一级电机处于高转速模式,及二级电机处于高扭矩低转速模式。
12、优选地,在步骤s2中,一级电机的输出功率的计算公式如下:
13、
14、其中,p1为一级电机的输出功率;q中为一级气室的气压;q前为标准大气压强;u为气垫船的控制器的输入功率;
15、二级电机的输出功率的计算公式如下:
16、
17、其中,p2为二级电机的输出功率;q中为一级气室的气压;q后为二级气室的气压;u为气垫船的控制器的输入功率。
18、优选地,在步骤s8中,一级电机的总功率的计算公式如下:
19、p1'=αo+p1
20、其中,p1'为一级电机的总功率;p1为一级电机的输出功率;αo为航向角度调整部分的功率;
21、二级电机的总功率的计算公式如下:
22、p2'=-αo+p2
23、其中,p2'为二级电机的总功率;p2为二级电机的输出功率;αo为航向角度调整部分的功率。
24、优选地,在步骤s8中,当二级电机处于高扭矩低转速模式时,计算二级电机高扭矩时的瞬间功率,具体计算公式如下:
25、p瞬=(q后-q中)+p瞬0×u
26、其中,p瞬为二级电机高扭矩时的瞬间功率;q后为二级气室的气压;q中为一级气室的气压;p瞬0为二级电机高扭矩时的瞬间功率基准值;u为气垫船的控制器的输入功率。
27、本申请的另一方面提供了基于foc算法的变速变矩共轴反桨涵道装置控制系统,所述系统包括:
28、采集模块,用于采集一级气室和二级气室的气压;
29、第一获取模块,用于获取气垫船的控制器的输入功率;
30、第一计算模块,用于根据一级气室的气压、二级气室的气压和气垫船的控制器的输入功率,分别计算一级电机和二级电机的输出功率;
31、第二获取模块,用于获取一级电机和二级电机的驱动电流数据值;
32、第三获取模块,用于根据一级电机和二级电机的驱动电流数据值,获取螺旋正桨和螺旋反桨的扭矩;
33、第四获取模块,用于根据螺旋正桨和螺旋反桨的扭矩,获取气垫船的航向角度;
34、第二计算模块,用于将气垫船的航向角度与预设航向角度作差值运算,得到误差值;
35、第三计算模块,用于根据误差值,计算得到航向角度调整部分的功率;
36、第四计算模块,用于根据一级电机的输出功率、二级电机的输出功率和航向角度调整部分的功率,计算得到一级电机和二级电机的总功率,以控制一级电机处于高转速模式,及二级电机处于高扭矩低转速模式。
37、优选地,在第一计算模块中,一级电机的输出功率的计算公式如下:
38、
39、其中,p1为一级电机的输出功率;q中为一级气室的气压;q前为标准大气压强;u为气垫船的控制器的输入功率;
40、二级电机的输出功率的计算公式如下:
41、
42、其中,p2为二级电机的输出功率;q中为一级气室的气压;q后为二级气室的气压;u为气垫船的控制器的输入功率。
43、优选地,在第四计算模块中,一级电机的总功率的计算公式如下:
44、p1'=αo+p1
45、其中,p1'为一级电机的总功率;p1为一级电机的输出功率;αo为航向角度调整部分的功率;
46、二级电机的总功率的计算公式如下:
47、p2'=-αo+p2
48、其中,p2'为二级电机的总功率;p2为二级电机的输出功率;αo为航向角度调整部分的功率。
49、优选地,所述第四计算模块包括计算子模块,所述计算子模块用于当二级电机处于高扭矩低转速模式时,计算二级电机高扭矩时的瞬间功率,具体计算公式如下:
50、p瞬=(q后-q中)+p瞬0×u
51、其中,p瞬为二级电机高扭矩时的瞬间功率;q后为二级气室的气压;q中为一级气室的气压;p瞬0为二级电机高扭矩时的瞬间功率基准值;u为气垫船的控制器的输入功率。
52、本申请实施例提供的技术方案可以包括以下有益效果:
53、本方案中通过foc电机驱动算法实现一级电机处于高转速模式,二级电机处于高扭矩低转速模式,使螺旋正桨和螺旋反桨产生的反扭大小相同,进而使共轴反桨涵道装置的扭矩相互抵消,避免气垫船发生自转,能够更稳定地控制气垫船的航向角。
技术特征:
1.基于foc算法的变速变矩共轴反桨涵道装置控制方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的基于foc算法的变速变矩共轴反桨涵道装置控制方法,其特征在于:在步骤s2中,一级电机的输出功率的计算公式如下:
3.根据权利要求1所述的基于foc算法的变速变矩共轴反桨涵道装置控制方法,其特征在于:在步骤s8中,一级电机的总功率的计算公式如下:
4.根据权利要求1所述的基于foc算法的变速变矩共轴反桨涵道装置控制方法,其特征在于:在步骤s8中,当二级电机处于高扭矩低转速模式时,计算二级电机高扭矩时的瞬间功率,具体计算公式如下:
5.基于foc算法的变速变矩共轴反桨涵道装置控制系统,其特征在于:使用如权利要求1-4任意一项所述基于foc算法的变速变矩共轴反桨涵道装置控制方法,所述系统包括:
6.根据权利要求5所述的基于foc算法的变速变矩共轴反桨涵道装置控制系统,其特征在于:在第一计算模块中,一级电机的输出功率的计算公式如下:
7.根据权利要求5所述的基于foc算法的变速变矩共轴反桨涵道装置控制系统,其特征在于:在第四计算模块中,一级电机的总功率的计算公式如下:
8.根据权利要求5所述的基于foc算法的变速变矩共轴反桨涵道装置控制系统,其特征在于:所述第四计算模块包括计算子模块,所述计算子模块用于当二级电机处于高扭矩低转速模式时,计算二级电机高扭矩时的瞬间功率,具体计算公式如下:
技术总结
本发明公开了基于FOC算法的变速变矩共轴反桨涵道装置控制方法及系统,该方法包括采集一级气室和二级气室的气压,及获取气垫船的控制器的输入功率;计算一级电机和二级电机的输出功率;获取气垫船的航向角度;将气垫船的航向角度与预设航向角度作差值运算,得到误差值;计算得到航向角度调整部分的功率;计算得到一级电机和二级电机的总功率,以控制一级电机处于高转速模式,及二级电机处于高扭矩低转速模式。本发明解决了传统的共轴反桨涵道装置由于涵道管的存在,流经螺旋正桨和螺旋反桨的气体流速不同,造成螺旋正桨和螺旋反桨产生的反扭大小不同,进而使整个共轴反桨涵道装置的扭矩不能相互抵消,造成气垫船机体自转的问题。
技术研发人员:罗锐帆,肖博文,李家翔,徐雍,饶红霞
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!