一种爬壁多栖机器人
本发明属于机器人,涉及一种爬壁多栖机器人。
背景技术:
1、现在对于大型建筑外墙、工业设备以及隧道的检测平台常常采用的是无人机或者是各种爬壁机器人。现在的各种爬壁机器人已经能过实现在平面、凸面、凹面、倾斜壁面等复杂壁面环境下进行作业,而无人机技术这几年也突飞猛进,具有自主定位、导航、控制、当能力,现如今各种传感器(加速度计、陀螺仪、磁力计、摄像头等)的精度不断提高使得机器人获得自身位置、姿态以及周围环境的能力也大幅提升,无人机也在各行各业中广泛使用。各种爬壁机器人和无人机给我们提供了很多先进的控制算法和控制系统方案,通过高清晰度图像和高精度传感器的采集,这两种机器人可以提供准确的被检测物体的外墙信息,从而捕捉到细微的缺陷和损伤,也可以通过外墙全景拍摄,并通过三维建模技术生成立体图像,使得被检测建筑外墙的缺陷和损伤更加直观。在材料科学方面,各种具有高强度、轻质、柔韧、耐磨等特性材料的出现使得机器人能够制作得更加小巧、坚韧。但是无论是爬壁机器人还是无人机在进行上述作业时都又一定的缺陷。
2、对于爬壁机器人来说,现今常见的爬壁机器人有轮式爬壁机器人、足式爬壁机器人、吸盘式爬壁机器人、磁力爬壁机器人等。对于轮式爬壁机器人的有点就是控制简单、稳定,但是其缺点就是不适用于不规则或者是壁面环境较差的环境。足式爬壁机器人的有点是具有较好的适应能力和抓握力,壁面适应性强,但是其控制难度较大、控制稳定性略弱。并且由于保持四足的抓握力需要保持足够的摩檫力,对能量的消耗较大。且以上两种爬壁机器人在进行作业时对壁面的伤害较大。吸盘式爬壁机器人的有点和足式类似,其缺点是对壁面的平整度和材质要求较高。且环境的变化对吸盘的抓附力影响较大。磁力爬壁机器人的缺点就更加明显,其只能用于平滑的金属壁面。
3、而对于无人机来说,因为全世界的研究者的贡献,现如今的无人机技术已经很是成熟了,无人机的控制精度各方面已经有了质的飞跃。但是无人机对天气的要求比较高(风力尽量小)。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种爬壁多栖机器人,便于机器人进行各种模式的切换,从而适应当前的环境。
2、为达到上述目的,本发明是采用下述技术方案实现的:
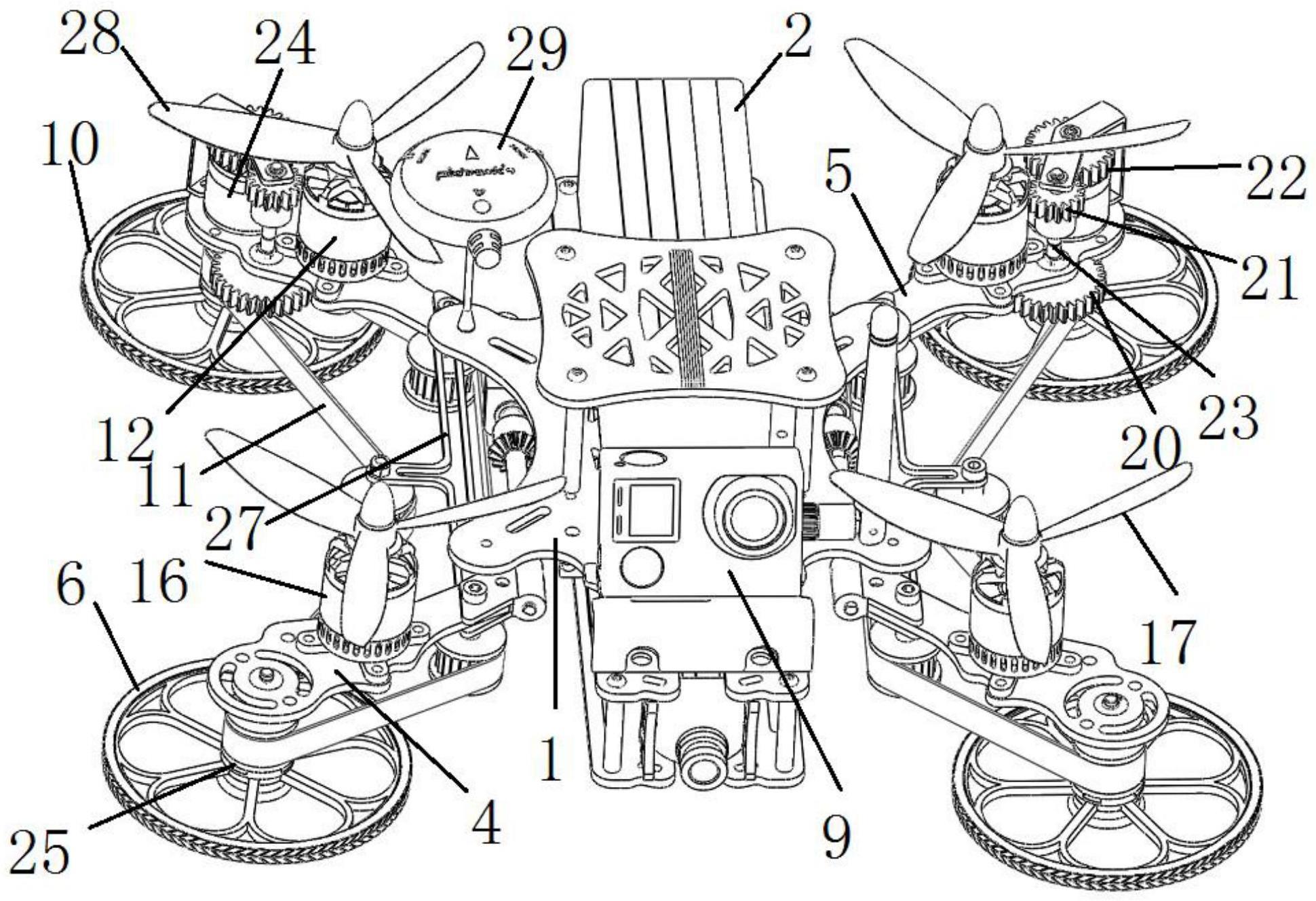
3、一种爬壁多栖机器人,包括机架和电源,所述机架上设有分别设于所述机架两侧的转轴和用于驱动转轴转动的驱动装置,所述转轴与所述机架转动连接;所述转轴上设有前臂架和后臂架,所述前臂架上设有前驱动轮、前螺旋桨和用于驱动前螺旋桨转动的前电机,所述后臂架上设有后驱动轮、后螺旋桨、用于驱动后螺旋桨和后驱动轮转动的后电机。
4、可选的,所述驱动装置包括舵机和驱动轴,所述舵机与所述机架相接,所述舵机的输出轴、所述转轴和所述驱动轴上分别设有锥齿轮,所述驱动轴通过所述锥齿轮与所述转轴啮合连接,所述舵机的输出轴通过所述锥齿轮与所述驱动轴啮合连接。
5、可选的,所述前电机与所述前臂架的上端相接,所述前螺旋桨与所述前电机的输出轴相接,所述后电机与所述后臂架的上端相接,所述后螺旋桨与所述后电机的输出轴相接,所述前驱动轮与所述前臂架的下端转动连接,所述后驱动轮与所述后臂架的下端转动连接。
6、可选的,所述后臂架上设有减速机构,所述后电机通过所述减速机构驱动所述后驱动轮转动。
7、可选的,所述减速机构包括第一齿轮、第二齿轮、第三齿轮、第四齿轮、连接轴和行星减速器,所述第一齿轮和所述第二齿轮设于所述后臂架的下方,所述第三齿轮和所述第四齿轮设于所述后臂架的上方,所述第一齿轮设于所述后电机的输出轴上,所述连接轴贯穿所述后臂架,与所述后臂架转动连接,所述第二齿轮和所述第三齿轮分别设于所述连接轴的两端,所述第四齿轮设于所述行星减速器的输入轴,所述行星减速器的输出轴与所述后驱动轮相接。
8、可选的,所述第二齿轮的直径大于所述第一齿轮和所述第三齿轮的直径;所述第四齿轮的直径大于所述第三齿轮的直径。
9、可选的,所述前臂架与所述后臂架之间设有用于驱动所述前驱动轮转动的联动机构。
10、可选的,所述联动机构包括同步带和同步带轮,所述同步带轮分别设于所述前驱动轮和所述后驱动轮的中心轴上,所述同步带轮与所述同步带滚动连接。
11、可选的,所述联动机构还包括导向轮和用于安装导向轮的安装架,所述安装架的两端分别与所述机架同侧的所述前臂架和所述后臂架相接,所述导向轮与所述安装架转动连接,所述导向轮与所述同步带滚动连接。
12、可选的,所述机架上设有控制器、用于定位的gps模块、用于接收信号的接收机、用于数据图像传输的数图传模块和用于摄像的摄像模块,所述控制器分别与所述gps模块、所述接收机、所述数图传模块、所述摄像模块、所述驱动装置、所述前电机和所述后电机电性连接,所述数图传模块与所述摄像模块电性连接。
13、与现有技术相比,本发明所达到的有益效果:
14、本发明提供一种爬壁多栖机器人,通过驱动装置驱动转轴转动,实现了前臂架和后臂架的收起和放下,面对不同的环境,机器人能够根据不同的环境来选择飞行或者陆地行走两种模式,提高了机器人的自适应能力,从而保证机器人牢固的附着在建筑表面或悬停在建筑表面;
15、减速机构方便后电机同时带动后驱动轮和后螺旋桨转动,减轻了机器人本身的重量;
16、联动机构便于带动前驱动轮转动,提高了机器人陆地行走时的稳定性。
技术特征:
1.一种爬壁多栖机器人,其特征在于:包括机架和电源,所述机架上设有分别设于所述机架两侧的转轴和用于驱动转轴转动的驱动装置,所述转轴与所述机架转动连接;所述转轴上设有前臂架和后臂架,所述前臂架上设有前驱动轮、前螺旋桨和用于驱动前螺旋桨转动的前电机,所述后臂架上设有后驱动轮、后螺旋桨、用于驱动后螺旋桨和后驱动轮转动的后电机。
2.根据权利要求1所述的爬壁多栖机器人,其特征在于:所述驱动装置包括舵机和驱动轴,所述舵机与所述机架相接,所述舵机的输出轴、所述转轴和所述驱动轴上分别设有锥齿轮,所述驱动轴通过所述锥齿轮与所述转轴啮合连接,所述舵机的输出轴通过所述锥齿轮与所述驱动轴啮合连接。
3.根据权利要求1所述的爬壁多栖机器人,其特征在于:所述前电机与所述前臂架的上端相接,所述前螺旋桨与所述前电机的输出轴相接,所述后电机与所述后臂架的上端相接,所述后螺旋桨与所述后电机的输出轴相接,所述前驱动轮与所述前臂架的下端转动连接,所述后驱动轮与所述后臂架的下端转动连接。
4.根据权利要求1所述的爬壁多栖机器人,其特征在于:所述后臂架上设有减速机构,所述后电机通过所述减速机构驱动所述后驱动轮转动。
5.根据权利要求4所述的爬壁多栖机器人,其特征在于:所述减速机构包括第一齿轮、第二齿轮、第三齿轮、第四齿轮、连接轴和行星减速器,所述第一齿轮和所述第二齿轮设于所述后臂架的下方,所述第三齿轮和所述第四齿轮设于所述后臂架的上方,所述第一齿轮设于所述后电机的输出轴上,所述连接轴贯穿所述后臂架,与所述后臂架转动连接,所述第二齿轮和所述第三齿轮分别设于所述连接轴的两端,所述第四齿轮设于所述行星减速器的输入轴,所述行星减速器的输出轴与所述后驱动轮相接。
6.根据权利要求5所述的爬壁多栖机器人,其特征在于:所述第二齿轮的直径大于所述第一齿轮和所述第三齿轮的直径;所述第四齿轮的直径大于所述第三齿轮的直径。
7.根据权利要求1所述的爬壁多栖机器人,其特征在于:所述前臂架与所述后臂架之间设有用于驱动所述前驱动轮转动的联动机构。
8.根据权利要求7所述的爬壁多栖机器人,其特征在于:所述联动机构包括同步带和同步带轮,所述同步带轮分别设于所述前驱动轮和所述后驱动轮的中心轴上,所述同步带轮与所述同步带滚动连接。
9.根据权利要求8所述的爬壁多栖机器人,其特征在于:所述联动机构还包括导向轮和用于安装导向轮的安装架,所述安装架的两端分别与所述机架同侧的所述前臂架和所述后臂架相接,所述导向轮与所述安装架转动连接,所述导向轮与所述同步带滚动连接。
10.根据权利要求1所述的爬壁多栖机器人,其特征在于:所述机架上设有控制器、用于定位的gps模块、用于接收信号的接收机、用于数据图像传输的数图传模块和用于摄像的摄像模块,所述控制器分别与所述gps模块、所述接收机、所述数图传模块、所述摄像模块、所述驱动装置、所述前电机和所述后电机电性连接,所述数图传模块与所述摄像模块电性连接。
技术总结
本发明公开了一种爬壁多栖机器人,包括机架和电源,所述机架上设有分别设于所述机架两侧的转轴和用于驱动转轴转动的驱动装置,所述转轴与所述机架转动连接;所述转轴上设有前臂架和后臂架,所述前臂架上设有前驱动轮、前螺旋桨和用于驱动前螺旋桨转动的前电机,所述后臂架上设有后驱动轮、后螺旋桨、用于驱动后螺旋桨和后驱动轮转动的后电机。本发明便于机器人进行各种模式的切换,从而适应当前的环境。
技术研发人员:徐林森,祝健,梅欢,徐孝彬
受保护的技术使用者:河海大学常州校区
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!