车辆轨迹的偏离修正方法、车辆驾驶辅助方法及设备与流程
本技术涉及车辆行驶,特别涉及一种车辆轨迹的偏离修正方法、车辆驾驶辅助方法及设备。
背景技术:
1、随着电子信息技术的发展,机动车驾驶人培训也实现了无需教练现场教学的自主学习,学员只需按照车辆中的语音(或视频)等提示信息完成相关训练项目。目前,语音(或视频)教学方式只是在学员练车过程中,语音播放正确的操作提示,以代替教练现场教学。
2、然而,在实际练车场景下,即使有语音提示,学员也很容易出现操作失误(如汽车压线)的情况。但是当前车辆未针对学员已出现的操作失误进行分析,无法针对该操作失误给出正确的操作指导。
技术实现思路
1、本技术为解决上述技术问题,提供一种车辆轨迹的偏离修正方法、车辆驾驶辅助方法及设备。
2、第一方面,本技术提供一种车辆轨迹的偏离修正方法,包括:
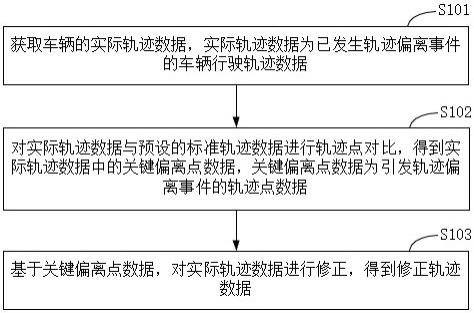
3、获取车辆的实际轨迹数据,实际轨迹数据为已发生轨迹偏离事件的车辆行驶轨迹数据;
4、对实际轨迹数据与预设的标准轨迹数据进行轨迹点对比,得到实际轨迹数据中的关键偏离点数据,关键偏离点数据为引发轨迹偏离事件的轨迹点数据;
5、基于关键偏离点数据,对实际轨迹数据进行修正,得到修正轨迹数据。
6、本技术通过获取车辆的实际轨迹数据,实际轨迹数据为已发生轨迹偏离事件的车辆行驶轨迹数据,以针对学员已出现的操作失误进行分析;并对实际轨迹数据与预设的标准轨迹数据进行轨迹点对比,得到实际轨迹数据中的关键偏离点数据,以分析出从何时何地的操作失误导致轨迹偏离事件的发生,即分析出引发轨迹偏离事件的根本问题源头;最后基于关键偏离点数据,对实际轨迹数据进行修正,得到修正轨迹数据,以从根本问题源头开始修正实际轨迹数据,从而能够针对驾驶员已出现的操作失误进行分析并给出更准确的操作指导。
7、在第一方面的一些实现方式中,对实际轨迹数据与预设的标准轨迹数据进行轨迹点对比,得到实际轨迹数据中的关键偏离点数据,包括:
8、根据实际轨迹数据与标准轨迹数据之间的位置差数据,确定实际轨迹数据中的根本问题轨迹数据,根本问题轨迹数据为引发轨迹偏离事件的轨迹数据;
9、基于根本问题轨迹数据与标准轨迹数据之间的方向盘角度差数据,将根本问题轨迹数据中的目标轨迹点数据确定为实际轨迹数据的关键偏离点数据,目标轨迹点数据为根本问题轨迹数据中与方向盘角度差数据符合第一预设条件时对应的轨迹点数据。
10、本实现方式基于实际轨迹与标准轨迹之间的位置差和方向盘角度差,分析引发偏离事件的关键偏离点,以综合考虑车辆行驶路径和驾驶员操作对根本问题点分析的影响,从而提高关键偏离点数据的准确度。
11、在第一方面的一些实现方式中,根据实际轨迹数据与标准轨迹数据之间的位置差数据,确定实际轨迹数据中的根本问题轨迹数据,包括:
12、根据实际轨迹数据和标准轨迹数据,计算实际轨迹与标准轨迹之间的对比数据,对比数据包括位置差数据、航向角度差数据和方向盘角度差数据;
13、将实际轨迹数据中与对比数据符合第二预设条件时对应的轨迹点数据确定为良好轨迹点数据;
14、基于良好轨迹点数据与终止轨迹点数据,确定实际轨迹数据中的根本问题轨迹数据,终止轨迹点数据为实际轨迹数据中与发生轨迹偏离事件时对应的轨迹点数据。
15、本实现方式通过对比实际轨迹与标准轨迹之间的位置差、航向角度差和方向盘角度差,并确定良好轨迹点和根本问题轨迹,以综合考虑车辆行驶路径、车辆姿态和驾驶员操作对根本问题轨迹分析的影响,从而提高根本问题轨迹数据的准确度。
16、在第一方面的一些实现方式中,根据根本问题轨迹数据与标准轨迹数据之间的方向盘角度差数据,将根本问题轨迹数据中的目标轨迹点数据确定为实际轨迹数据的关键偏离点数据,包括:
17、根据根本问题轨迹数据与标准轨迹数据,计算根本问题轨迹与标准轨迹之间的方向盘角度差序列,方向盘角度差序列包括以车辆的轨迹方向为顺序的多个方向盘角度差数据;
18、按照车辆的轨迹方向,根据方向盘角度差序列,对方向盘角度差数据进行累加,得到累加值;
19、若累加值大于第一预设值,则将根本问题轨迹数据中与累加值为第二预设值时对应的轨迹点数据确定为关键偏离点数据。
20、本实现方式通过累加方向盘角度差的方式确定关键偏离点数据,以消除车辆行驶过程中的正常偏离现象对分析过程的影响,有效降低正常偏离现象对关键偏离点数据的误判,进一步提高关键偏离点数据的准确度。
21、在第一方面的一些实现方式中,对实际轨迹数据与预设的标准轨迹数据进行轨迹点对比,得到实际轨迹数据中的关键偏离点数据之前,还包括:
22、基于实际轨迹数据和车辆所在的场景数据,确定轨迹偏离事件的偏离区域;
23、若偏离区域为第一预设偏离区域,则进入对实际轨迹数据与预设的标准轨迹数据进行轨迹点对比的步骤。
24、在第一方面的一些实现方式中,基于实际轨迹数据和车辆所在的场景数据,确定轨迹偏离事件的偏离区域之后,还包括:
25、若偏离区域为第二预设偏离区域,则计算实际轨迹数据与标准轨迹数据之间的位置差数据;
26、若位置差数据符合第三预设条件,则进入对实际轨迹数据与预设的标准轨迹数据进行轨迹点对比的步骤;
27、若位置差数据不符合第三预设条件,则判定实际轨迹数据中发生轨迹偏离事件时的终止轨迹点数据为关键偏离点数据。
28、在第一方面的一些实现方式中,基于关键偏离点数据,对实际轨迹数据进行修正,得到修正轨迹数据,包括:
29、选取实际轨迹数据中的待修正轨迹数据,待修正轨迹数据为以关键偏离点数据为起点和以轨迹偏离事件的终止轨迹点数据为终点的轨迹数据;
30、对待修正轨迹数据进行分段,得到多个路段数据;
31、依次对路段数据进行路径规划,直至得到修正轨迹数据,其中每次路径规划以路段数据的实际起点为路径规划地点和以标准轨迹数据的终点为路径规划终点。
32、第二方面,本技术还提供一种车辆驾驶辅助方法,包括:
33、获取车辆的实际轨迹数据和修正轨迹数据,修正轨迹数据基于如第一方面的车辆轨迹的偏离修正方法得到;
34、基于实际轨迹数据,动态显示车辆的汽车模型在具有第一视觉标识的实际轨迹线上行驶的图像界面;
35、当汽车模型行驶至实际轨迹线的关键偏离点时,基于修正轨迹数据,动态显示汽车模型在具有第二视觉标识的修正轨迹线上行驶的图像界面,关键偏离点为实际轨迹数据中引发轨迹偏离事件的轨迹点数据所对应的轨迹点。
36、本技术通过显示实际轨迹线和修正轨迹线,并动态显示汽车模型在实际轨迹线上的行驶画面,以模拟驾驶员操作车辆时的实际轨迹;以及动态显示汽车模型在修正轨迹线上的行驶画面,以可视化方式指导驾驶员进行正确的驾驶操作。
37、第三方面,本技术还提供一种车辆驾驶辅助方法,包括:
38、获取车辆的实际轨迹数据和修正轨迹数据,修正轨迹数据基于如第一方面的车辆轨迹的偏离修正方法得到;
39、利用车辆的自动驾驶功能,根据实际轨迹数据,还原车辆的行驶轨迹;
40、当车辆行驶至关键偏离点时,关闭自动驾驶功能,并基于修正轨迹数据,发送提示信息,提示信息用于指导驾驶员按照修正轨迹数据进行手动驾驶,关键偏离点为实际轨迹数据中引发轨迹偏离事件的轨迹点数据所对应的轨迹点。
41、本技术通过自动驾驶功能将车辆还原至引发偏离事件的关键偏离点位置,并基于修正轨迹数据,指导驾驶员进行实车训练,提高了机动车驾驶人培训的培训效果。
42、第四方面,本技术还提供一种计算机设备,包括处理器和存储器,存储器用于存储计算机程序,计算机程序被处理器执行时实现如第一方面的车辆轨迹的偏离修正方法,或如第二方面的车辆驾驶辅助方法。
43、第五方面,本技术还提供一种车载终端,包括处理器和存储器,存储器用于存储计算机程序,计算机程序被处理器执行时实现如第三方面的车辆驾驶辅助方法。
44、需要说明的是,第四方面和第五方面的有益效果请参照上述第一方面至第三方面的相关描述,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!