一种基于避障判断的泊车辅助系统的制作方法
本发明涉及智能交通和汽车,具体地说,涉及一种基于避障判断的泊车辅助系统。
背景技术:
1、目前,随着科技和经济水平的快速发展,汽车的保有量不断增加,车辆数量的增加使城市有限的空间变得逐渐拥挤,泊车空间的缩小增加了泊车困难,因此人们对辅助泊车系统的需求日益增加。
2、现有申请号为cn201410244728.9的辅助泊车系统以及辅助泊车控制方法,包括基于b样条理论的泊车路径规划方法设计出多阶平滑的泊车路径满足车辆避障约束、最小转弯半径约束、最高转向速度等多个非线性约束。路径曲率连续性避免了原地转向现象降低了轮胎磨损和转向电机负荷,路径的多阶平滑性易于车辆跟踪,本发明提出的泊车运动控制策略,降低了泊车系统对驾驶员泊车速度要求,驾驶员只需控制车辆低速行驶即可。针对泊车过程中因车速过高等因素导致车辆偏离目标路径而不能泊车入位现象,提出基于定点跟踪控制的车辆位姿调整策略,增加了泊车成功率,并采用定点跟踪控制使车辆与车位平行停放,实现了车辆停放规范性。
3、而这种方法只是对车辆位姿调整策略,对车辆避障约束、最小转弯半径约束、最高转向速度等多个非线性约束,通过多个约束实现泊车辅助和控制,但是却没有对泊车过程中的路径进行限制,当需要泊车的车位周围有障碍物时,无法根据具体情况进行具体调整,从而无法满足用户泊车的需求。
技术实现思路
1、针对现有泊车的车位周围有障碍物时,无法根据具体情况进行具体调整,从而无法满足用户泊车的需求的问题,本发明提供一种基于避障判断的泊车辅助系统。
2、为解决上述问题,本发明采用如下的技术方案。
3、一种基于避障判断的泊车辅助系统,所述系统包括:
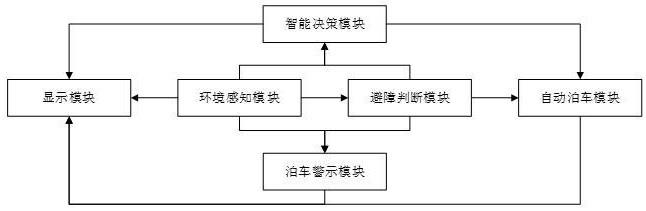
4、环境感知模块,用于通过传感器组或者检测电路检测泊车环境,获取泊车车位位置、姿态和车位角度数据信息;其中所述环境感知模块包括超声波感知单元、双目视觉检测单元和行波定位单元,其中所述双目视觉检测单元通过三维摄像头对泊车的位置进行检测,所述行波定位单元通过双端单端测距方法感知泊车故障因素,所述超声波感知单元通过超声传感器发送和接收超声波以实现车辆周围的检测;
5、避障判断模块,用于生成并判断障碍物信息模型;所述避障判断模块通过emd算法模型判断障碍物信息,所述emd算法模型包括数据分类模块、特征提取模块、信息分解模块和d-s诊断模块,其中所述数据分类模块的输出端与所述特征提取模块的输入端连接,所述特征提取模块的输出端与所述信息分解模块输入端连接,所述信息分解模块输出端与所述d-s诊断模块的输入端连接;
6、泊车警示模块,用于实现对驾驶员的警示和提醒功能,所述泊车警示模块通过环境感知模块数据和避障判断模块数据实现对驾驶员的警示和提醒功能,所述泊车警示模块包括警示单元和警示逻辑控制单元,所述警示单元通过声光警示器对泊车异常信息以声光报警的形式提醒用户;所述警示逻辑控制单元通过模糊控制算法模型判断何时触发警示器。
7、智能决策模块, 对避障判断模块的障碍物信息模型和环境感知模块的传感器数据通过机器学习和深度学习算法进行实时分析和处理,并生成车辆操作辅助指令,以辅助驾驶员进行泊车操作;
8、自动泊车模块,所述自动泊车模块包括惯性测量单元和电子控制单元;其中所述惯性测量单元通过加速度计和陀螺仪测量车辆的加速度、角速度和方向,以实现预估车辆的运动状态;所述电子控制单元通过路径规划算法和控制算法执行控制命令,以实现自动泊车操作;
9、显示模块,用于显示避障判断模块建立的车辆模型和环境模型以及智能决策模块生成的车辆辅助操作指令,并根据全球定位导航系统实时更新车辆模型在环境模型上的位置;
10、所述环境感知模块输出端与所述避障判断模块输入端连接,所述环境感知模块和所述避障判断模块输出端与所述泊车警示模块输入端连接;所述环境感知模块和所述避障判断模块输出端与所述智能决策模块输入端连接;所述智能决策模块输出端与自动泊车模块输入端连接,所述避障判断模块,所述泊车警示模块和所述智能决策模块输出端与所述显示模块输入端连接。
11、作为本发明进一步的技术方案,所述三维摄像头通过校正公式对多个角度获取的图像进行拼接与畸变校正,校正公式如下:
12、
13、其中,为光线入射角度,为出射光线在相机归一化平面上的成像位置,、、、和为介于0-2之间的影响出射光线在相机归一化平面上成像位置的畸变参数。
14、作为本发明进一步的技术方案,所述超声波感知单元包括超声波发射电路和超声波接收电路,所述超声发射器通过压电产生器施加电压激励压电材料,使电压激励压电材料振动产生超声波,以产生超声波脉冲;所述超声接收器由压电晶体和压电陶瓷组成,所述超声接收器在当超声波脉冲达到接收器时,压电材料产生机械振动,通过动电转换方法转换为电信号。
15、作为本发明进一步的技术方案,所述超声波感知单元包括超声波发射电路,所述超声波发射电路包括超声波发射探头和5个反向器,所述反向器采用74ls04反向器,单片机提供的方波信号由反向器接入集成电路通过所述超声波发射探头进行发射;其中,方波信号与所述反向器u1的1端连接,所述反向器u1的2端分别与所述反相器u2的3端和所述反向器u3的5端连接,所述反向器u2的4端分别与电阻r1和所述反向器u3的6端连接,单片机提供的方波信号输出端分别与所述反相器u4的7端和所述反向器u5的9端连接,所述反向器u5的10端与电阻r2和所述反向器u4的8端连接,5v电压向电阻r1和r2提供工作电压,所述反向器u3的6端分别与所述反向器u4的8端与所述超声波发射探头连接。
16、作为本发明进一步的技术方案,所述超声波感知单元包括超声波接收放大电路,所述超声波接收放大电路包括超声波接收探头、运算放大器和比较器;所述运算放大器采用ne5532运算放大器,所述比较器采用集成lm311-8比较器;所述ne5532运算放大器,是一种双运放高性能低噪声运算放大器,两级放大电路构成10000倍的放大器对接受到的超声波进行足够放大;在所述运算放大器进行足够放大后,还要对已经放大的超声波信号进行整波,采用所述集成lm311-8比较器,对前级放大信号进行调理;其中,所述超声波接收探头与电容c1、c2的输入端连接,电容c2的输出端与电阻r5的输入端连接,电阻r4接地,电阻r3接vcc,电阻r3的输出端和电阻r4的输出端与所述ne5532运算放大器u6的正极连接,电阻r5的输出端与所述ne5532运算放大器u6的负极连接,电阻r6和电容c3与所述ne5532运算放大器u6的负极和输出端连接,电容c1的输出端与所述ne5532运算放大器u7的正极连接,所述ne5532运算放大器u6的输出端与所述ne5532运算放大器u7的负通过电阻r7和电容c4连接,电阻r8和电容c5与所述ne5532运算放大器u7的负极和输出端连接,所述ne5532运算放大器u7的输出端与电阻r9和所述集成lm311-8比较器u8的6端连接,所述集成lm311-8比较器u8的5、8端接地,4端接vcc,电阻r10的输入端接vcc,电阻r10的输出端与所述集成lm311-8比较器u8的2端连接。
17、作为本发明进一步的技术方案,所述双目视觉检测模块检测车辆时,其中检测模型公式如下:
18、x(3)
19、(4)
20、(5)
21、(6)
22、在公式(3)(4)(5)(6)中 ,和分别为车辆后轴中点在x轴和y轴上的坐标,为车辆后轴中点行驶速度,为车身方位角,为车轴轴距。
23、作为本发明进一步的技术方案,所述车辆模型在环境模型进行移动时,建立运动模型,公式如下:
24、(7)
25、(8)
26、在公式(7),公式(8)中,t为车辆移动总时间,为运动的持续时间,为前轮转角方向改变的时间,为车辆的最大速度,为车辆最大的前轮转角,为从0加速到的时间,为从0加速到的时间。
27、作为本发明进一步的技术方案,所述模糊控制算法是针对车辆输入转向角偏差的五个模糊集和车辆后轴中点的位置偏差的五个模糊集,其中转向角的入转向角偏差的五个模糊集为{nb ns zo ps pb}={负大,负小,零,正小,正大};车辆后轴中点的位置偏差的五个模糊集为{nb ns zo ps pb}={负大,负小,零,正小,正大};输出转向角输出值的七个模糊集,为{nb nm ns zo ps pm pb}={负大,负重,负小,零,正小,正中,正大}。
28、作为本发明进一步的技术方案,所述警示单元采用声光报警电路实现声光报警功能,所述声光报警电路包括pnp型三极管和蜂鸣器;所述声光报警电路由vcc电源驱动,信号由所述pnp型三极管进行放大,驱动所述蜂鸣器发声进行提醒;其中,电阻r11的输出端与电阻r13的输入端连接,电阻r13和电容c6的输出端与所述pnp型三极管q1的基极连接,电阻r12的输出端与所述pnp型三极管q1的集电极连接,所述pnp型三极管q1的发射极与所述蜂鸣器ls1连接,并接地,电容c6接地。
29、本发明区别现有技术积极有益效果在于:
30、相比于现有技术,本发明的有益效果为:
31、(1)本发明通过避障判断模块建立车辆模型和环境模型,在根据车辆模型和环境模型建立车辆运动过程中的运动模型,对车辆当前的行驶状况进行实时计算和控制,可以根据泊车现场的障碍物情况,达到具体情况具体控制;
32、(2)本发明采用模糊控制算法进行路径规划和控制,车辆和环境数据进行计算,得到位置误差和航向误差,在通过车辆的运动模型计算出车辆的位置和航向角,然后与规划的路径曲线相比较,算出目标车辆与目标轨迹的位置误差和该位置的航向误差,将计算出的位置误差和航向误差输入进行模糊化处理,再进行逻辑推理和反模糊化,将处理后的数值输入至运动模型,结合速度值控制车辆的运行,将运行的数值在重复计算,构成循环反馈,使得计算出的结果更加可靠;
33、(3)本发明通过超声波感知单元发送并接收超声波信号,在测量数值时产生跳变,记录跳变时刻,通过记录两辆车辆的跳变时刻,再结合车辆的速度,得到车位长度,对车位平均宽度和车位长度进行分析,判断当前车位是否符合泊车要求,从而判断车位是平行式泊车、垂直式泊车还是斜列式泊车,以及停放的车为两侧是否由车辆停靠,做到具体情况具体分析,提高系统的实用性。
- 还没有人留言评论。精彩留言会获得点赞!