基于磁流变油气弹簧的车辆减振控制系统及方法
本发明涉及磁流变减振领域,具体涉及一种基于磁流变油气弹簧的车辆减振控制系统及方法。
背景技术:
1、目前,对于车辆减振控制的硬件方面,重载车辆多采用钢板弹簧、螺旋弹簧以及扭杆弹簧等悬挂装置,但在实际使用的过程中存在着刚度阻尼不可调、刚度较差、占用空间大等缺点,减振效果不佳,难以保证车辆具有较高的机动性能以及越野性能。磁流变技术具有响应快、能耗低、可调范围大等优点,目前已有少量人员将磁流变技术引入到油气弹簧中,提出了磁流变油气弹簧的构想,但并未将其应用到液压互联中并对加以控制。
2、另外,对于车辆减振控制的算法方面,传统的天棚控制算法相对简单,可以较好的抑制车体的垂向振动,但却难以保证操纵稳定性;而最优控制、鲁棒控制等算法所需状态变量较多,对硬件设备要求较高,应用受到了限制;模糊控制、神经网络控制等算法较为复杂,控制规则依赖于专家经验,也未得到较好的应用。cn100484788c中提出了一种仿人智能控制方法,具有算法逻辑简单,采用传感器较少的特点,但其仅是针对磁流变半主动悬架的控制方法,并没有考虑悬架之间的液压互联。当出现急转弯或者急刹车等状况时,由于器件的输出阻尼力有限,难以保证车身的稳定性,而采用液压互联的悬架系统具有优越的非线性弹性特征、良好的减振性能和承载能力,可以最大限度地满足车辆的稳定性。根据液压缸的连接方式不同,液压互联可以分为同向和反向互联,两种状态的切换常采用电磁换向阀来实现。电磁换向阀本身结构简单,价格较低,但其阀芯只能处于两个极限位置,不能连续调节,同时其对介质的洁净度要求较高,含颗粒状以及粘稠状的介质不能够适用。因此,需要一种基于磁流变油气弹簧的车辆减振控制系统及方法,能够解决以上问题。
技术实现思路
1、有鉴于此,本发明的目的是克服现有技术中的缺陷,提供基于磁流变油气弹簧的车辆减振控制系统及方法,能够获得更好的抗侧倾刚度和抗俯仰刚度,提升了重载车辆的整体减振性能以及操纵稳定性。
2、本发明的基于磁流变油气弹簧的车辆减振控制系统,包括磁流变油气悬架单元、采集单元以及控制单元;
3、所述磁流变油气悬架单元包括磁流变油气弹簧以及pinch模式磁流变阀;所述磁流变油气弹簧用于油气悬架中的液压互联,所述pinch模式磁流变阀用于切换液压互联形式;
4、所述采集单元用于采集车辆的运动姿态信息;
5、所述控制单元用于根据车辆的运动姿态信息,调整油气悬架的互联形式,并对车辆运动姿态进行控制,使得车辆运行状态达到目标状态。
6、进一步,所述磁流变油气弹簧包括左前油气弹簧、左后油气弹簧、右前油气弹簧以及右后油气弹簧;
7、所述左前油气弹簧的油口p1分别与右前油气弹簧的油口p3、油口p4连接;油口p1与油口p3的连接管路上设置有pinch模式磁流变阀2a;油口p1与油口p4的连接管路上设置有pinch模式磁流变阀2c;
8、所述左前油气弹簧的油口p2分别与右前油气弹簧的油口p3、油口p4连接;油口p2与油口p3的连接管路上设置有pinch模式磁流变阀2b;油口p2与油口p4的连接管路上设置有pinch模式磁流变阀2d;
9、所述左后油气弹簧的油口p5分别与右后油气弹簧的油口p7、油口p8连接;油口p5与油口p7的连接管路上设置有pinch模式磁流变阀2e;油口p5与油口p8的连接管路上设置有pinch模式磁流变阀2g;
10、所述左后油气弹簧的油口p6分别与右后油气弹簧的油口p7、油口p8连接;油口p6与油口p7的连接管路上设置有pinch模式磁流变阀2f;在油口p6与油口p8的连接管路上设置有pinch模式磁流变阀2h;
11、所述左前油气弹簧的油口p1还分别与左后油气弹簧的油口p5、油口p6连接;油口p1与油口p6的连接管路上设置有pinch模式磁流变阀2i;油口p1与油口p5的连接管路上设置有pinch模式磁流变阀2j;
12、所述左前油气弹簧的油口p2还分别与右后油气弹簧的油口p7、油口p8连接;油口p2与油口p7的连接管路上设置有pinch模式磁流变阀2k;油口p2与油口p8的连接管路上设置有pinch模式磁流变阀2l。
13、进一步,所述采集单元包括均设置于车身质心处的加速度传感器以及倾角传感器。
14、进一步,所述油气悬架的互联形式包括抗侧倾型互联、抗俯仰型互联、抗垂向型互联以及液压闭锁。
15、一种基于磁流变油气弹簧的车辆减振控制方法,包括:
16、采用磁流变油气弹簧进行油气悬架的液压互联,并采用pinch模式磁流变阀进行液压互联形式的切换;
17、采集车辆的运动姿态信息;
18、根据车辆的运动姿态信息,调整油气悬架的互联形式,并对车辆运动姿态进行控制,使得车辆运行状态达到目标状态。
19、进一步,所述磁流变油气弹簧包括左前油气弹簧、左后油气弹簧、右前油气弹簧以及右后油气弹簧;
20、所述左前油气弹簧的油口p1分别与右前油气弹簧的油口p3、油口p4连接;油口p1与油口p3的连接管路上设置有pinch模式磁流变阀2a;油口p1与油口p4的连接管路上设置有pinch模式磁流变阀2c;
21、所述左前油气弹簧的油口p2分别与右前油气弹簧的油口p3、油口p4连接;油口p2与油口p3的连接管路上设置有pinch模式磁流变阀2b;油口p2与油口p4的连接管路上设置有pinch模式磁流变阀2d;
22、所述左后油气弹簧的油口p5分别与右后油气弹簧的油口p7、油口p8连接;油口p5与油口p7的连接管路上设置有pinch模式磁流变阀2e;油口p5与油口p8的连接管路上设置有pinch模式磁流变阀2g;
23、所述左后油气弹簧的油口p6分别与右后油气弹簧的油口p7、油口p8连接;油口p6与油口p7的连接管路上设置有pinch模式磁流变阀2f;在油口p6与油口p8的连接管路上设置有pinch模式磁流变阀2h;
24、所述左前油气弹簧的油口p1还分别与左后油气弹簧的油口p5、油口p6连接;油口p1与油口p6的连接管路上设置有pinch模式磁流变阀2i;油口p1与油口p5的连接管路上设置有pinch模式磁流变阀2j;
25、所述左前油气弹簧的油口p2还分别与右后油气弹簧的油口p7、油口p8连接;油口p2与油口p7的连接管路上设置有pinch模式磁流变阀2k;油口p2与油口p8的连接管路上设置有pinch模式磁流变阀2l。
26、进一步,所述运动姿态信息包括车身垂向加速度、俯仰角以及侧倾角。
27、进一步,根据车辆的运动姿态信息,调整油气悬架的互联形式,具体包括:
28、当车身姿态为第一单一姿态、第一双姿态、第二双姿态以及三姿态中任一姿态时,油气悬架的互联形式采用抗侧倾型互联;
29、当车身姿态为第二单一姿态以及第三双姿态中任一姿态时,油气悬架的互联形式采用抗俯仰型互联;
30、当车身姿态为第三单一姿态时,油气悬架的互联形式采用抗垂向型互联;
31、当车身姿态处于理想运动姿态时,油气悬架的互联形式采用液压闭锁;
32、其中,第一单一姿态包括侧倾;第二单一姿态包括俯仰;第三单一姿态包括垂向;第一双姿态包括侧倾与俯仰;第二双姿态包括侧倾与垂向;第三双姿态包括俯仰与垂向;三姿态包括侧倾、俯仰以及垂向。
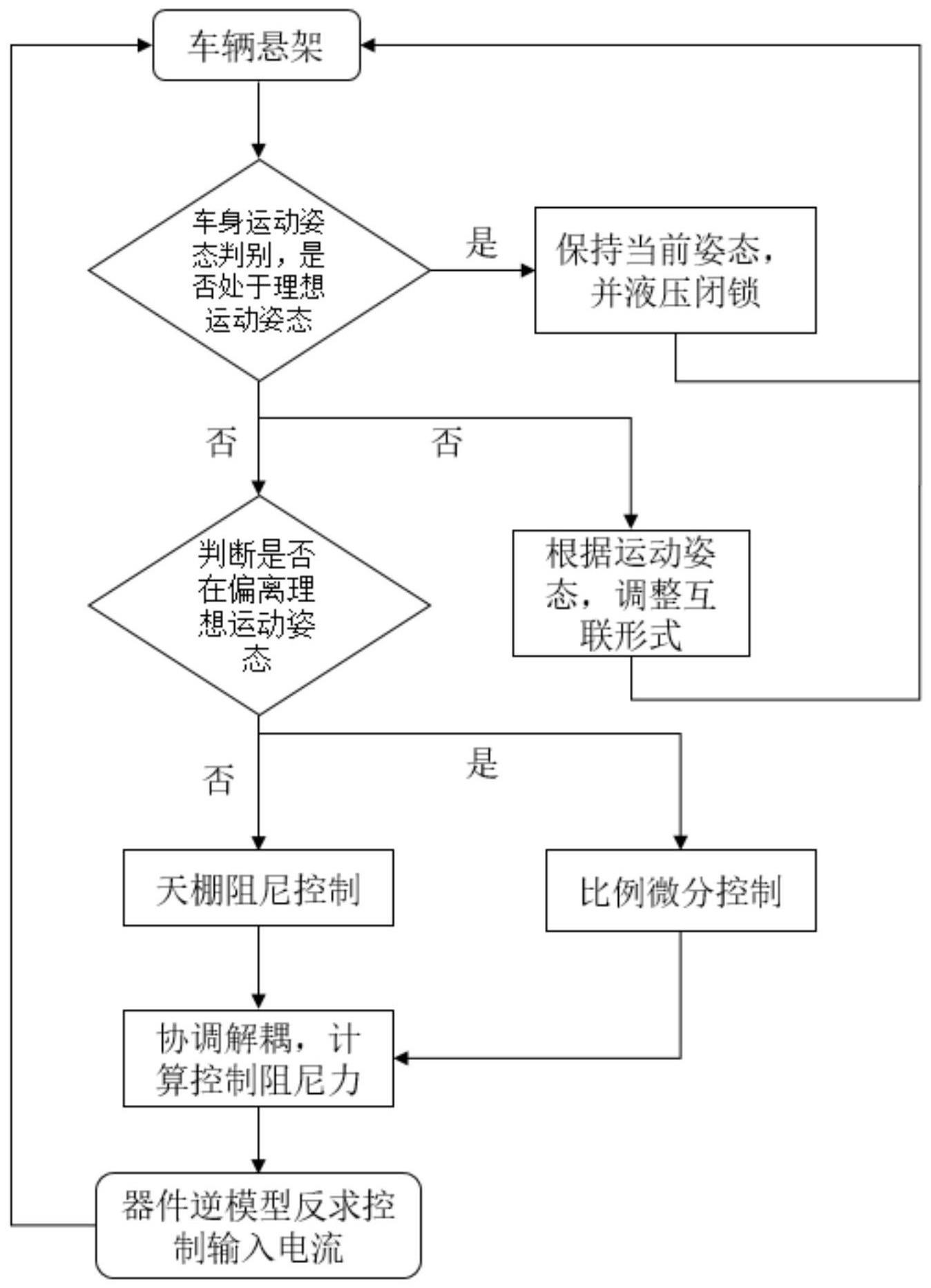
33、进一步,对车辆运动姿态进行控制,使得车辆运行状态达到目标状态,包括如下步骤:
34、a.判断车身姿态是否处于理想运动姿态,若是,则保持当前姿态并液压闭锁;若否,则进入步骤b;
35、b.判断车身姿态是否偏离理想运动姿态,若是,则进入步骤c,若否,则进入步骤d;
36、c.对车身姿态进行比例微分控制,使得车身运动姿态达到理想运动姿态,具体包括:
37、构建车身运动姿态第一解耦方程:
38、
39、其中,a表示车身质心到前轴的距离,b表示车身质心到后轴的距离,w表示车身宽度;fdfl、fdfr、fdrl以及fdrr分别表示左前、右前、左后以及右后磁流变油气弹簧的输出阻尼力;kp-z、以及kp-θ分别为控制垂向、俯仰以及侧倾运动时的比例系数;z(n)、以及θ(n)分别为时刻n车身的垂向位移、俯仰角以及侧倾角;kd-z、以及kd-θ分别为控制垂向、俯仰以及侧倾运动时的微分系数;以及分别为某时刻n车身垂向速度、俯仰角速度以及侧倾角速度;
40、对车身运动姿态第一解耦方程进行求解,计算出所需的磁流变油气弹簧输出阻尼力fdf1;
41、根据所需的输出阻尼力fdf1,反算出磁流变油气弹簧所需的输入电流ic1,调整向磁流变油气弹簧输入的电流为所需的输入电流ic1;
42、d.对车身姿态进行天棚阻尼控制,使得车身运动姿态达到理想运动姿态,具体包括:
43、构建车身运动姿态第二解耦方程:
44、
45、其中,a表示车身质心到前轴的距离,b表示车身质心到后轴的距离,w表示车身宽度;fdfl、fdfr、fdrl以及fdrr分别表示左前、右前、左后以及右后磁流变油气弹簧的输出阻尼力;csky-z、以及csky-θ分别为控制垂向、俯仰以及侧倾运动时的天棚阻尼系数;以及分别为时刻n车身垂向速度、俯仰角速度以及侧倾角速度;
46、对车身运动姿态第二解耦方程进行求解,计算出所需的磁流变油气弹簧输出阻尼力fdf2;
47、根据所需的输出阻尼力fdf2,反算出磁流变油气弹簧所需的输入电流ic2,调整向磁流变油气弹簧输入的电流为所需的输入电流ic2。
48、本发明的有益效果是:本发明公开的一种基于磁流变油气弹簧的车辆减振控制系统及方法,采用磁流变油气弹簧来代替传统油气弹簧来进行液压互联,并采用pinch模式磁流变阀来代替电磁换向阀以及节流阀进行液压互联方式的切换,能够获得更好的抗侧倾刚度和抗俯仰刚度;基于仿人智能控制图式理论,结合磁流变油气弹簧液压互联的特点,设计出具有特征模型和多模态控制结构的磁流变油气悬架协调解耦仿人智能控制器,算法逻辑简单,采用传感器较少,能够方便应用于装有互联型磁流变油气悬架的重载车辆上,实现实时控制,进一步保证了重载车辆具有良好的平顺性和操纵稳定性。
- 还没有人留言评论。精彩留言会获得点赞!