一种差速舵控制方法及控制系统与流程
本发明涉及车体控制领域,更具体地,涉及一种差速舵控制方法及控制系统。
背景技术:
1、差速舵和舵轮都是车体的驱动机构,舵轮的响应速度快、精度高等特点,使其成为agv上比较常见的驱动结构,但是舵轮有以下两个缺点:
2、(1)本体高度比差速舵高,在一些对车体底盘高度有要求的agv小车上,则无法满足安装要求;
3、(2)舵轮在原地旋转时,是靠转向电机驱动,使得驱动轮对地面摩擦,从而实现舵轮原地转向的目的。但是这种方式对驱动轮的摩擦损伤较大,且噪音也很大。
技术实现思路
1、本发明针对现有技术中存在的技术问题,提供一种差速舵控制方法及控制系统。
2、根据本发明的第一方面,提供了一种差速舵控制方法,包括:
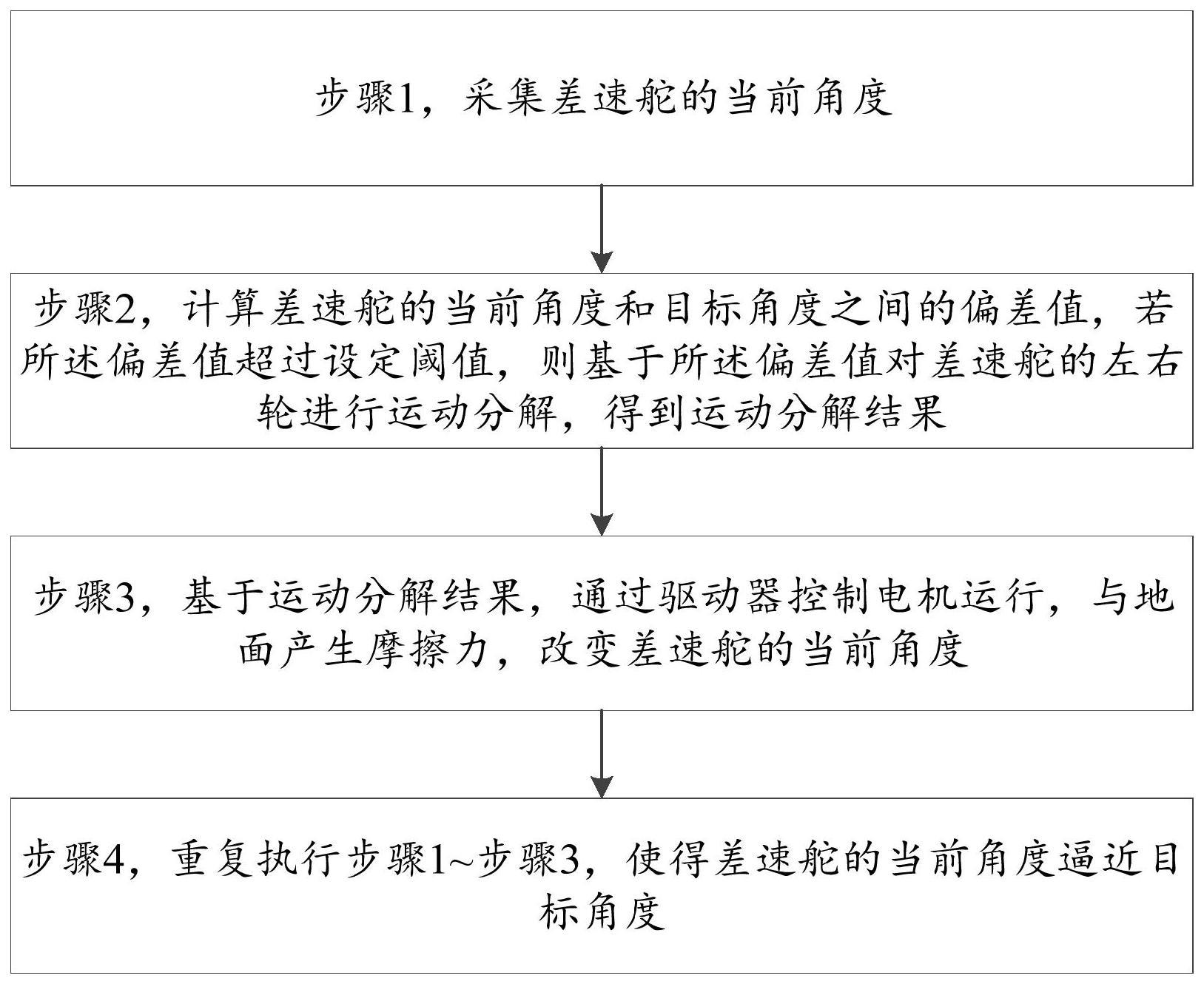
3、步骤1,采集差速舵的当前角度;
4、步骤2,计算差速舵的当前角度和目标角度之间的偏差值,若所述偏差值超过设定阈值,则基于所述偏差值对差速舵的左右轮进行运动分解,得到运动分解结果;
5、步骤3,基于运动分解结果,通过驱动器控制电机运行,与地面产生摩擦力,改变差速舵的当前角度;
6、步骤4,重复执行步骤1~步骤3,使得差速舵的当前角度逼近目标角度。
7、在上述技术方案的基础上,本发明还可以作出如下改进。
8、可选的,所述步骤1,采集差速舵的当前角度,包括:
9、在差速舵上安装转向传感器,基于所述转向传感器实时检测差速舵的当前角度。
10、可选的,所述步骤2中基于所述偏差值对差速舵的左右轮进行运动分解,得到运动分解结果,包括:
11、基于所述偏差值对差速舵的左右轮进行运动分解,得到差速舵的左轮速度和右轮速度;
12、步骤3,基于运动分解结果,通过驱动器控制电机运行,与地面产生摩擦力,改变差速舵的当前角度,包括:
13、将差速舵的左轮速度和右轮速度下发给驱动器,使得驱动器控制电机驱动驱动轮运行,根据差速舵的左右轮的速度差,与地面产生摩擦力,使差速舵的当前角度发生变化。
14、可选的,所述基于所述偏差值对差速舵的左右轮进行运动分解,得到差速舵的左轮速度和右轮速度,包括:
15、根据差速舵的当前角度和目标角度之间的偏差值,以及设定的旋转纠偏速度v_e和运行基准速度v_command,来对差速舵的左右轮进行运动分解,得到差速舵左轮速度、差速舵右轮速度和差速舵旋转速度值。
16、可选的,所述差速舵旋转速度值的计算公式为:
17、
18、其中,vrotate为差速舵旋转速度值,atarget为差速舵的目标角度,acurrent为差速舵的当前角度,v_e为设定的差速舵的旋转纠偏角度。
19、可选的,基于差速舵的运行基准速度v_command和差速舵旋转速度值,根据车体运行方向,计算差速舵左轮速度和差速舵右轮速度。
20、可选的,所述基于差速舵的运行基准速度v_command和差速舵旋转速度值,根据车体运行方向,计算差速舵左轮速度和差速舵右轮速度,包括:
21、当车体正向运动时,若a_target>a_current,则
22、vl=-vcommand-vrotate*-1;
23、vr=-vcommand+vrotate*-1;
24、若a_target<=a_current,则
25、vl=-vcommand+vrotate*-1;
26、vr=-vcommand-vrotate*-1;
27、其中,vl为差速舵左轮速度,vr为差速舵右轮速度。
28、可选的,所述基于差速舵的运行基准速度v_command和差速舵旋转速度值,根据车体运行方向,计算差速舵左轮速度和差速舵右轮速度,包括:
29、当车体反向运动时,若a_target>a_current,则
30、vl=vcommand+vrotate;
31、vr=vcommand-vrotate;
32、当a_target<=a_current,则
33、vl=vcommand-vrotate;
34、vr=vcommand+vrotate;
35、其中,vl为差速舵左轮速度,vr为差速舵右轮速度。
36、根据本发明的第二方面,提供一种差速舵控制系统,包括:
37、采集模块,用于采集差速舵的当前角度;
38、运动分解模块,用于计算差速舵的当前角度和目标角度之间的偏差值,若所述偏差值超过设定阈值,则基于所述偏差值对差速舵的左右轮进行运动分解,得到运动分解结果;
39、控制模块,用于基于运动分解结果,通过驱动器控制电机运行,与地面产生摩擦力,改变差速舵的当前角度,使得差速舵的当前角度逼近目标角度。
40、本发明提供的一种差速舵控制方法及控制系统,在重载车体、对地面要求较高的车体上,采用差速舵来代替舵轮,并采用一种新的控制方式,通过运动分解,来控制差速舵的左右轮电机速度,从而模拟舵轮的控制方式,来实现对差速舵角度的控制。
技术特征:
1.一种差速舵控制方法,其特征在于,包括:
2.根据权利要求1所述的差速舵控制方法,其特征在于,所述步骤1,采集差速舵的当前角度,包括:
3.根据权利要求1所述的差速舵控制方法,其特征在于,所述步骤2中基于所述偏差值对差速舵的左右轮进行运动分解,得到运动分解结果,包括:
4.根据权利要求3所述的差速舵控制方法,其特征在于,所述基于所述偏差值对差速舵的左右轮进行运动分解,得到差速舵的左轮速度和右轮速度,包括:
5.根据权利要求4所述的差速舵控制方法,其特征在于,所述差速舵旋转速度值的计算公式为:
6.根据权利要求5所述的差速舵控制方法,其特征在于,基于差速舵的运行基准速度v_command和差速舵旋转速度值,根据车体运行方向,计算差速舵左轮速度和差速舵右轮速度。
7.根据权利要求6所述的差速舵控制方法,其特征在于,所述基于差速舵的运行基准速度v_command和差速舵旋转速度值,根据车体运行方向,计算差速舵左轮速度和差速舵右轮速度,包括:
8.根据权利要求6所述的差速舵控制方法,其特征在于,所述基于差速舵的运行基准速度v_command和差速舵旋转速度值,根据车体运行方向,计算差速舵左轮速度和差速舵右轮速度,包括:
9.一种差速舵控制系统,其特征在于,包括:
技术总结
本发明提供一种差速舵控制方法及控制系统,控制方法包括:步骤1,采集差速舵的当前角度;步骤2,计算差速舵的当前角度和目标角度之间的偏差值,若所述偏差值超过设定阈值,则基于所述偏差值对差速舵的左右轮进行运动分解,得到运动分解结果;步骤3,基于运动分解结果,通过驱动器控制电机运行,与地面产生摩擦力,改变差速舵的当前角度;步骤4,重复执行步骤1~步骤3,使得差速舵的当前角度逼近目标角度。本发明在重载车体、对地面要求较高的车体上,采用差速舵来代替舵轮,并采用一种新的控制方式,通过运动分解,来控制差速舵的左右轮电机速度,从而模拟舵轮的控制方式,来实现对差速舵角度的控制。
技术研发人员:王作昌,李大伟
受保护的技术使用者:法睿兰达科技(武汉)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!