方向盘接触检测的制作方法
本公开涉及车辆中的方向盘接触检测。
背景技术:
1、诸如电容传感器的接触传感器可以包括在车辆方向盘中或车辆方向盘上,以确定用户的手是否与方向盘接触。然而,接触传感器至多检测导电对象是否与方向盘接触。
技术实现思路
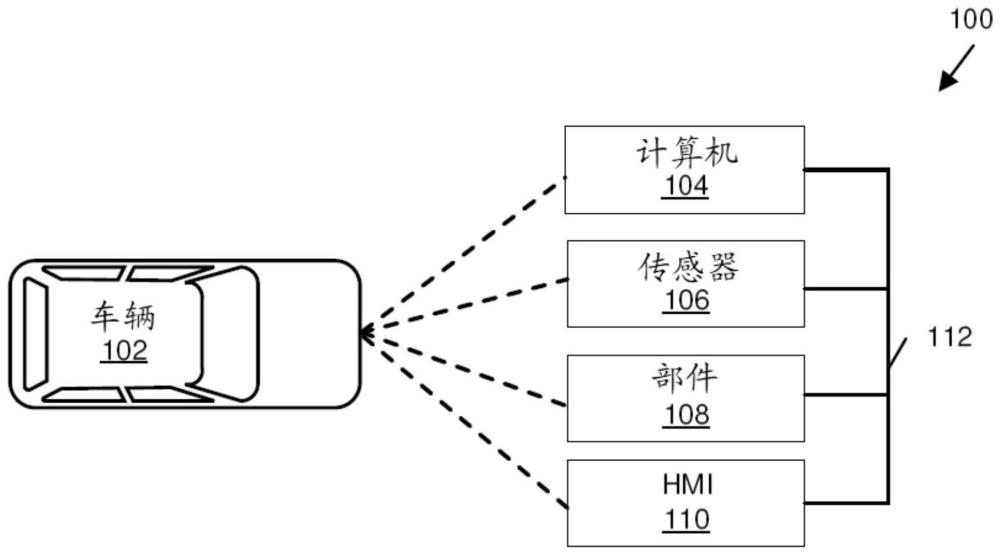
1、如本文所公开的,车辆中的计算机可以输出对与车辆中的方向盘接触的对象是人手还是某个其他对象的预测或确定。计算机可以从方向盘传感器(例如,车辆方向盘中或车辆方向盘上的电容传感器等)接收指示对象与方向盘接触的数据。计算机可以从车辆中的一个或多个相机接收另外的数据,即,图像数据。可以基于图像数据来确定方向盘的旋转角度。例如,计算机可以根据第一图像确定第一方向盘旋转角度并根据第二图像确定第二方向盘旋转角度。此外,可以从第一图像或第二图像中的一者或两者将对象的类型识别为人手或某个其他对象(在本文中称为“外来”对象)。然后可以基于对象的类型来控制车辆。例如,如果对象是外来对象,则车辆计算机可以向用户输出消息和/或可以采用其他控制选项,诸如限制车辆速度、经由车辆方向盘或座椅提供触觉输出等。
2、因此,一种系统包括处理器和存储器,所述存储器存储指令,所述指令可由所述处理器执行使得所述处理器被编程为检测与车辆的方向盘接触的对象;获得所述方向盘在第一旋转角度下的第一图像和所述方向盘在第二旋转角度下的第二图像;基于所述第一图像或所述第二图像中的至少一者将所述对象的类型识别为人手或外来对象中的一者;以及基于所述对象的类型来控制车辆部件。
3、所述处理器还可以被编程为基于所述对象的深度估计来识别所述对象的类型。所述处理器还可以被编程为通过凭借组合所述第一图像和所述第二图像确定所述方向盘的表面法线来获得所述对象的深度估计。所述处理器还可以被编程为基于来自方向盘扭矩传感器和电位计中的一者或两者的数据来识别所述对象的类型。
4、所述处理器还可以被编程为基于关于所述车辆的当前用户的数据来控制所述车辆部件。关于所述车辆的当前用户的数据可以是眼睛注视数据。替代地或另外,关于所述车辆的当前用户的数据可以是操作员配置文件数据。
5、所述处理器还可以被编程为接收从第一相机提供的第一图像和从第二相机提供的第二图像。所述第一图像或所述第二图像中的至少一者可以从雷达和/或激光雷达提供。
6、接触传感器可以被布置成提供指示所述对象与所述方向盘接触的信号。
7、所述处理器还可以被编程为在将所述对象的类型识别为所述人手时,基于所述人手相对于所述方向盘上的界标的位置来控制所述车辆部件。
8、所述处理器还可以被编程为基于所述第一图像和所述第二图像两者来识别所述对象的类型。
9、一种方法包括:检测与车辆的方向盘接触的对象;获得所述方向盘在第一旋转角度下的第一图像和所述方向盘在第二旋转角度下的第二图像;基于所述第一图像或所述第二图像中的至少一者将所述对象的类型识别为人手或外来对象中的一者;以及基于所述对象的类型来控制车辆部件。
10、所述方法还可以包括基于所述对象的深度估计来识别所述对象的类型。所述方法还可以包括通过凭借组合所述第一图像和所述第二图像确定所述方向盘的表面法线来获得所述对象的深度估计。所述方法还可以包括基于来自方向盘扭矩传感器和电位计中的一者或两者的数据来识别所述对象的类型。
11、所述方法还可以包括基于关于所述车辆的当前用户的数据来控制所述车辆部件。所述方法还可以包括从第一相机接收所述第一图像和从第二相机接收所述第二图像。所述方法还可以包括基于所述第一图像和所述第二图像两者来识别所述对象的类型。
技术特征:
1.一种方法,其包括:
2.根据权利要求1所述的方法,其还包括基于所述对象的深度估计来识别所述对象的所述类型。
3.根据权利要求2所述的方法,其还包括通过凭借组合所述第一图像和所述第二图像确定所述方向盘的表面法线来获得所述对象的所述深度估计。
4.根据权利要求1所述的方法,其还包括基于来自方向盘扭矩传感器和电位计中的一者或两者的数据来识别所述对象的所述类型。
5.根据权利要求1所述的方法,其还包括基于关于所述车辆的当前用户的数据来控制所述车辆部件。
6.根据权利要求1所述的方法,其还包括从第一相机接收所述第一图像和从第二相机接收所述第二图像。
7.根据权利要求1所述的方法,其还包括基于所述第一图像和所述第二图像两者来识别所述对象的所述类型。
8.根据权利要求1所述的方法,其中关于所述车辆的当前用户的数据是眼睛注视数据和/或操作员配置文件数据。
9.根据权利要求1所述的方法,其还包括从第一相机接收所述第一图像和从第二相机接收所述第二图像。
10.根据权利要求1所述的方法,其中所述第一图像或所述第二图像中的至少一者是从雷达或激光雷达提供的。
11.根据权利要求1所述的方法,其还包括基于所述第一图像和所述第二图像两者来识别所述对象的所述类型。
12.根据权利要求1所述的方法,其还包括使用接触传感器,所述接触传感器被布置成提供指示所述对象与所述方向盘接触的信号。
13.根据权利要求1所述的方法,其还包括在将所述对象的所述类型识别为所述人手时,基于所述人手相对于所述方向盘上的界标的位置来控制所述车辆部件。
14.一种计算机,其被编程为执行根据权利要求1-13中任一项所述的方法。
15.一种车辆,其包括根据权利要求14所述的计算机。
技术总结
本公开提供“方向盘接触检测”。可以检测与车辆的方向盘接触的对象。然后获得所述方向盘在第一旋转角度下的第一图像和所述方向盘在第二旋转角度下的第二图像。基于所述第一图像或所述第二图像中的至少一者将所述对象的类型识别为人手或外来对象中的一者。基于所述对象的所述类型来控制车辆部件。
技术研发人员:大卫·迈克尔·赫尔曼,Y·杰恩,瑞恩·索斯比
受保护的技术使用者:福特全球技术公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!