一种新能源车辆能量回收系统及方法与流程
本发明属于新能源车辆,尤其涉及一种新能源车辆能量回收系统及方法。
背景技术:
1、在实现本发明的过程中,发明人发现现有技术至少存在以下问题:
2、在新能源电动汽车使用过程中,动力电池组总成作为唯一的动力输出来源,在车辆行驶过程中,其剩余电量的多少决定着车辆的续航里程的长短。其中,能量回收作为车辆在行驶过程中唯一对电池进行补充电量的途径,其能量回收系统能够有效回收车辆在行驶过程中电能的效率,极大的影响了车辆的续航里程及用户体验。
3、在现有技术中,新能源汽车能量回收系统局限于动力电池系统的充放电矩阵及电池系统soc范围的影响,存在车辆进行制动、滑行过程中无法及时有效合理的对此过程中产生的能量及时的进行回馈利用导致车辆同级车中续航里程偏短,耗电快等缺点。
4、cn111775713a-一种电动车辆能量回收制动停车的控制方法,公开了一种电动车辆能量回收制动停车的控制方法,包括以下步骤:ⅰ.在电动车辆处于电动车辆能量回收制动停车的状态时,由整车控制器采集车辆油门和制动踏板信号,并解析生成对应的内部扭矩指令。ⅱ.将步骤ⅰ生成的上述内部扭矩指令经过能量回收衰减系数y调整。ⅲ.将步骤ⅱ调整后的上述内部扭矩指令经撤扭处理生成电机扭矩指令。ⅳ.步骤ⅲ中的上述电机扭矩指令通过can通信发送给电机控制器,由电机控制器控制电机执行相应的扭矩输出,也无法解决上述技术问题。
技术实现思路
1、本发明所要解决的技术问题是提供一种新能源车辆能量回收系统及方法,其目的是解决新能源车辆续航里程短、耗电快的问题。
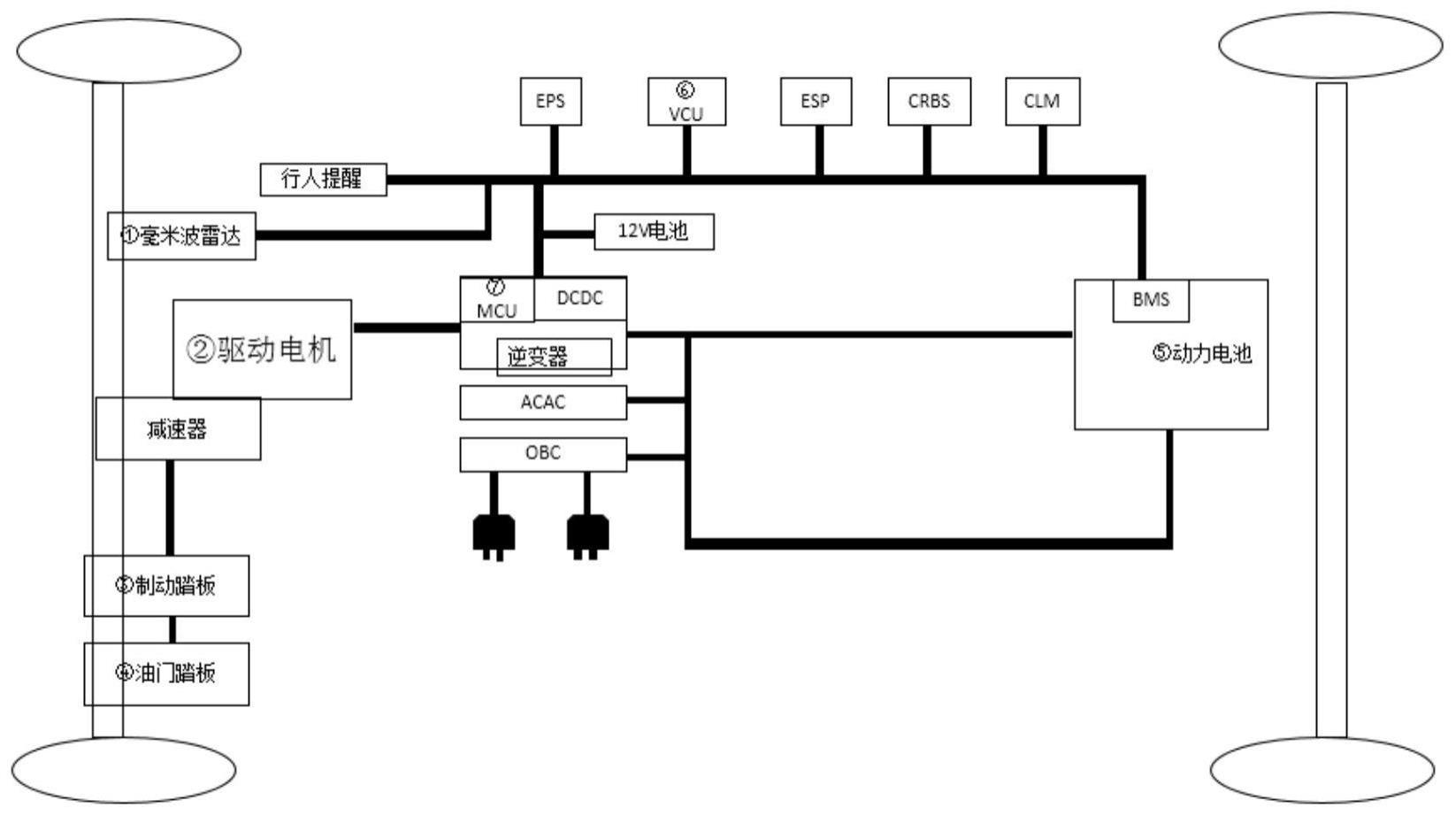
2、为了解决上述技术问题,本发明所采用的技术方案是:如权利要求1所述新能源车辆能量回收系统,其特征在于,包括车载毫米波雷达、轮速传感器、制动踏板位置传感器、油门位置传感器、驱动电机、电池管理系统、整车控制器、电机控制器,所述车载毫米波雷达与整车控制器连接,所述整车控制器与电池管理系统、制动踏板位置传感器、轮速传感器、油门位置传感器连接。
3、所述动力电池系统与电机控制器连接;所述电机控制器与驱动电机连接。
4、所述毫米波雷达与整车控制器连接,在车辆行驶过程中将实时车辆前端位置距离s实时发送给整车控制器;所述制动踏板位置信号传感器与整车控制器连接,在车辆行驶过程中实时的将制动踏板位置行程l1发送给整车控制器;所述油门位置踏板传感器与整车控制器连接,在车辆行驶过程中实时的将油门踏板位置行车l2发送给整车控制器;所述轮速传感器与整车控制器连接,在车辆行驶过程中实时将车辆当前车速发送给整车控制器。
5、所述驱动电机在制动踏板位置传感器所发送的行程值l1>0时,驱动电机将作为发电机开启能量回收模式并将当前最大回馈电流值i1通过电机控制器发送给整车控制器。
6、所述电池管理系统与整车控制器连接,在接收到整车控制下发的最大回馈电流后,电池管理系统根据当前动力电池系统soc值判断当前所能承受的最大脉冲电流i2并反馈给整车控制器,能量回收系统开始在当前状态下进行能量回收工作,对动力电池系统进行充电。
7、上述的新能源车辆能量回收系统的回收方法,其特征在于,包括如下步骤:
8、1)毫米波雷达在整车行驶过程中,检测当前车辆距前方物体的距离;若距离s≤150m时,将此信息发送给整车控制器,此时车辆进入能量回收预备状态;并由轮速传感器上传当前车辆行车速度v至整车控制器,整车控制器根据当前轮速传感器上传车速v及当前车辆距离前方物体距离s计算出当前状态下制动时间t1,并将此时间下发给电池管理系统;动力电池管理系统在接收到此信息后,在预设的动力电池系统充电脉冲矩阵表中提取当前soc所能承受的最大充电电流,并将此信号反馈给整车控制器再由整车控制器对i1和i2进行对比;
9、2)如若所述雷达检测到当前车辆距前方物体的距离s>150m时,将此信息发送给整车控制器,此时整车控制检测优先检测制动是否有制动信号,此时信号优先级制动信号>油门踏板信号;如若此时检测到有制动信号,车辆开启能量回收系统,并根据当前制动踏板行程信号l1及当前电机控制器反馈的电流i1发送给整车控制器,并由整车控制器下发此电流i给电池管理系统;所述电池管理系统读取当前动力电池soc,并根据当前soc值与动力电池系统中提取所预设的脉冲回馈电流,对比之后开始对动力电池系统进行充电。
10、上述第1)步中,如果i1≥i2,则选取i2为当前最大允许回馈电流;如果i1≤i2,则选取i1为此当前最大允许回馈电流。
11、所述制动踏板位置信号传感器在车辆行驶过车中时刻发送当前制动踏板行程l1;如若l1=0,则整车控制器检测当前车速v并结合当前状态雷达检测的距离s:s>150m or s≤150m,由整车控制器根据此距离s选取当前能量回收系统采取的方式。
12、所述油门踏板位置传感器与整车控制器连接,其在整车行驶过程中时刻发送当前油门踏板行程l2;如若l2=0则将此信号发送给整车控制器的时由整车控制器检测当前轮速传感器所上传的车速,同时检测前方车辆距离s判断当前状态动力电池系统所能承受的最大回馈脉冲电流i2。
13、电池管理系统与整车控制器、动力电池系统连接,动力电池管理系统读取当前动力电池状态soc,并发送当前动力电池组所能承受的最大脉冲充电电流至整车控制器,将驱动电机产生的能量通过电机控制器回馈至动力电池系统;设定允许回馈最大soc为95%,各设定电量区间脉冲放电矩阵为[95%,90%]、[90%,85%]、[85%,80%]、[80%,75%]、[75%,70]、……、[10%,5%];各对应soc区间动力电池系统所能承受的脉冲回馈电流为i1、i2、i3、……、i20;假定当前动力电池系统当前状态soc为[75%,70%],动力电池管理系统根据当前soc值在动力电池系统脉冲充电矩阵中提取当前soc值所允许的最大充电电流i2,动力电池管理系统将此电流值i2上传至整车控制器,整车控制器接收此电流值i2后将其与电机控制器上传的回馈电流进去判断后,选取当前电流值作为回馈电流;根据毫米波雷发送距离所得时间t1或在制动踏板信号发送持续时间t2作为能量回收持续时间t;结合传感器上传信息,通过对电流i、时间t进行积分,通过积分曲线所占的面积,计算当前状态通过能量回收系统所回收的安时量。
14、上述技术方案中的一个技术方案具有如下优点或有益效果,利用毫米波雷达预警及优化在能量回收过程中动力电池系统脉冲矩阵的选取、能量回收过程中回收时间的优化,提升整车在使用过程中的经济性以及同等条件下车辆的续航里程。
技术特征:
1.一种新能源车辆能量回收系统,其特征在于,包括车载毫米波雷达、轮速传感器、制动踏板位置传感器、油门位置传感器、驱动电机、电池管理系统、整车控制器、电机控制器,所述车载毫米波雷达与整车控制器连接,所述整车控制器与电池管理系统、制动踏板位置传感器、轮速传感器、油门位置传感器连接。
2.如权利要求1所述新能源车辆能量回收系统,其特征在于,所述动力电池系统与电机控制器连接;所述电机控制器与驱动电机连接。
3.如权利要求2所述新能源车辆能量回收系统,其特征在于,所述毫米波雷达与整车控制器连接,在车辆行驶过程中将实时车辆前端位置距离s实时发送给整车控制器;所述制动踏板位置信号传感器与整车控制器连接,在车辆行驶过程中实时的将制动踏板位置行程l1发送给整车控制器;所述油门位置踏板传感器与整车控制器连接,在车辆行驶过程中实时的将油门踏板位置行车l2发送给整车控制器;所述轮速传感器与整车控制器连接,在车辆行驶过程中实时将车辆当前车速发送给整车控制器。
4.如权利要求3所述新能源车辆能量回收系统,其特征在于,所述驱动电机在制动踏板位置传感器所发送的行程值l1>0时,驱动电机将作为发电机开启能量回收模式并将当前最大回馈电流值i1通过电机控制器发送给整车控制器。
5.如权利要求4所述新能源车辆能量回收系统,其特征在于,所述电池管理系统与整车控制器连接,在接收到整车控制下发的最大回馈电流后,电池管理系统根据当前动力电池系统soc值判断当前所能承受的最大脉冲电流i2并反馈给整车控制器,能量回收系统开始在当前状态下进行能量回收工作,对动力电池系统进行充电。
6.一种如权利要求5所述的新能源车辆能量回收系统的回收方法,其特征在于,包括如下步骤:
7.如权利要求6所述新能源车辆能量回收方法,其特征在于,上述第1)步中,如果i1≥i2,则选取i2为当前最大允许回馈电流;如果i1≤i2,则选取i1为此当前最大允许回馈电流。
8.如权利要求7所述新能源车辆能量回收方法,其特征在于,所述制动踏板位置信号传感器在车辆行驶过车中时刻发送当前制动踏板行程l1;如若l1=0,则整车控制器检测当前车速v并结合当前状态雷达检测的距离s:s>150m or s≤150m,由整车控制器根据此距离s选取当前能量回收系统采取的方式。
9.如权利要求8所述新能源车辆能量回收方法,其特征在于,所述油门踏板位置传感器与整车控制器连接,其在整车行驶过程中时刻发送当前油门踏板行程l2;如若l2=0则将此信号发送给整车控制器的时由整车控制器检测当前轮速传感器所上传的车速,同时检测前方车辆距离s判断当前状态动力电池系统所能承受的最大回馈脉冲电流i2。
10.如权利要求8所述新能源车辆能量回收方法,其特征在于,电池管理系统与整车控制器、动力电池系统连接,动力电池管理系统读取当前动力电池状态soc,并发送当前动力电池组所能承受的最大脉冲充电电流至整车控制器,将驱动电机产生的能量通过电机控制器回馈至动力电池系统;设定允许回馈最大soc为95%,各设定电量区间脉冲放电矩阵为[95%,90%]、[90%,85%]、[85%,80%]、[80%,75%]、[75%,70]、……、[10%,5%];各对应soc区间动力电池系统所能承受的脉冲回馈电流为i1、i2、i3、……、i20;假定当前动力电池系统当前状态soc为[75%,70%],动力电池管理系统根据当前soc值在动力电池系统脉冲充电矩阵中提取当前soc值所允许的最大充电电流i2,动力电池管理系统将此电流值i2上传至整车控制器,整车控制器接收此电流值i2后将其与电机控制器上传的回馈电流进去判断后,选取当前电流值作为回馈电流;根据毫米波雷发送距离所得时间t1或在制动踏板信号发送持续时间t2作为能量回收持续时间t;结合传感器上传信息,通过对电流i、时间t进行积分,通过积分曲线所占的面积,计算当前状态通过能量回收系统所回收的安时量。
技术总结
本发明公开了一种新能源车辆能量回收系统及方法,包括车载毫米波雷达、轮速传感器、制动踏板位置传感器、油门位置传感器、驱动电机、电池管理系统、整车控制器、电机控制器,所述车载毫米波雷达与整车控制器连接,所述整车控制器与电池管理系统、制动踏板位置传感器、轮速传感器、油门位置传感器连接。利用毫米波雷达预警及优化在能量回收过程中动力电池系统脉冲矩阵的选取、能量回收过程中回收时间的优化,提升整车在使用过程中的经济性以及同等条件下车辆的续航里程。
技术研发人员:李飞,齐永忠,郭晓庆
受保护的技术使用者:安徽瑞露科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!