用于紧急避障的迭代轨迹重新规划的制作方法
本公开总体上涉及控制自动驾驶车辆的操作,尤其是,一些实施方案可涉及用于紧急避障的迭代轨迹重新规划。
背景技术:
1、自动驾驶车辆有潜力通过轨迹重新规划来提高紧急情况下的安全性,即使在车辆的极限情况下也是如此。然而,在紧急避障时,轨迹重新规划中使用的参考轨迹可能不再是最优的或甚至不再适用,并且在极端情况下,在搜索最优控制输入时还会产生冲突信息。这种复杂性导致了具有挑战性的轨迹控制问题,该问题的负担是通过轨迹重新规划保持轨迹模型保真度(从而允许车辆在整个具有挑战性的紧急情况下保持稳定性)和计算效率(例如,寻找全新轨迹的成本或受到因与不断变化的环境冲突而无效的信号影响)之间的平衡。需要更好的方法来整体改进自动驾驶车辆操作和避障策略。
技术实现思路
1、根据所公开技术的各个实施例,一种用于自动驾驶车辆的轨迹规划方法包括:确定用于车辆在第一时间点沿第一空间位置行驶的第一轨迹规划,其中所述第一轨迹规划为参考轨迹规划;计算用于所述车辆在所述第一时间点之后的第二时间点沿第二空间位置行驶的最优序列;以及通过用来自计算出的最优序列的信息更新所述第一轨迹规划来计算所述车辆的第二轨迹规划。
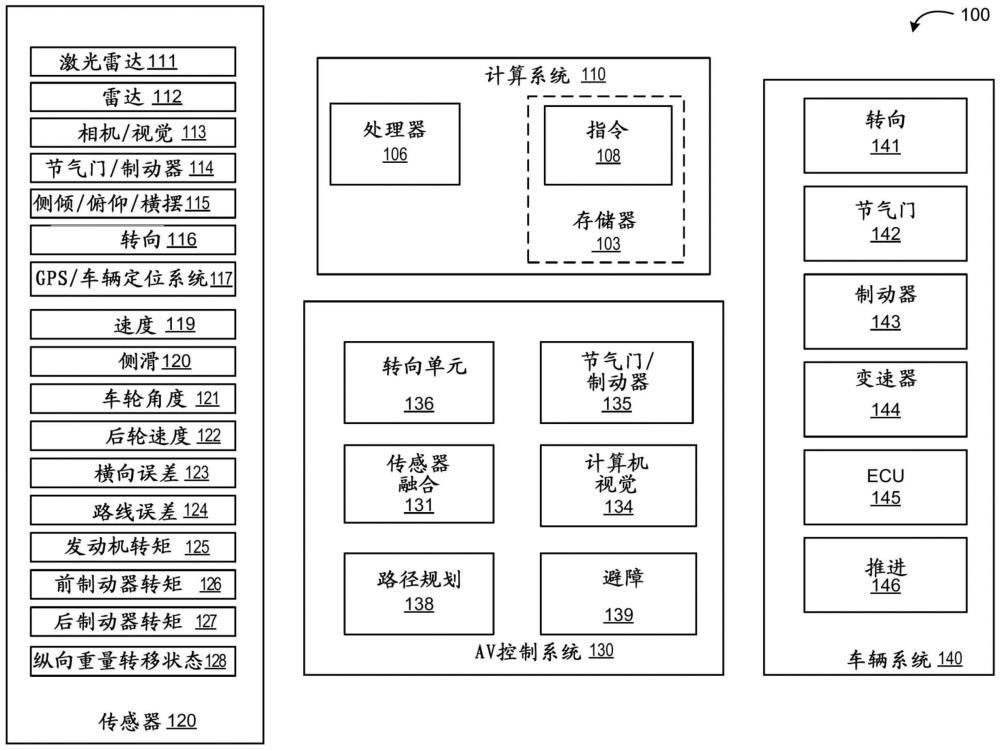
2、在一些实施例中,所述车辆的非线性动力学特征被用于确定所述第一轨迹规划和计算所述最优序列。所述车辆的非线性动力学特征可对应于横摆率、速率、侧滑、车轮角度、后轮速度、横向误差、路线误差、发动机转矩、前制动器转矩、后制动器转矩和纵向重量转移状态中的至少一者。在一个实施例中,所述车辆的非线性动力学特征包括轮胎动力学特征。
3、在一些实施例中,所述第一轨迹规划包括不包含障碍物或环境变化的轨迹,并且所述第二轨迹规划包括包含障碍物或环境变化的轨迹。
4、在一些实施例中,所述第一轨迹规划是离线确定的,并且所述最优序列的计算是实时进行的,由此所述最优序列是当前最优序列。
5、在一些实施例中,所述第一轨迹规划相对于所述第二轨迹规划的计算被赋予较小的权重。
6、在一些实施例中,所述方法还包括:计算所述车辆在所述第二时间点之后的第三时间点沿第三空间位置行驶的另一最优序列;以及通过用来自计算出的另一最优序列的信息更新所述第二轨迹规划来计算所述车辆的第三轨迹规划,其中所述第二轨迹规划是与所述第三轨迹规划的计算相关的另一参考轨迹规划。
7、在一些实施例中,所述第二轨迹规划和所述第三轨迹规划包括包含障碍物或环境变化的轨迹。
8、在一些实施例中,所述第二轨迹规划相对于所述第三轨迹规划的计算被赋予较小的权重。
9、根据所公开技术的另外的实施例,一种用于自动驾驶车辆的轨迹规划的车辆控制系统包括:处理器;和联接到所述处理器以存储指令的存储器。所述指令在被所述处理器执行时使处理器执行操作。所述操作包括:确定用于所述车辆在第一时间点沿第一空间位置行驶的第一轨迹规划,其中所述第一轨迹规划为参考轨迹规划;计算用于所述车辆在所述第一时间点之后的第二时间点沿第二空间位置行驶的最优序列;以及通过用来自计算出的最优序列的信息更新所述第一轨迹规划来计算所述车辆的第二轨迹规划。
10、在一些实施例中,所述车辆的非线性动力学特征被用于确定所述第一轨迹规划和计算所述最优序列。所述车辆的非线性动力学特征可对应于横摆率、速率、侧滑、车轮角度、后轮速度、横向误差、路线误差、发动机转矩、前制动器转矩、后制动器转矩和纵向重量转移状态中的至少一者。在一个实施例中,所述车辆的非线性动力学特征包括轮胎动力学特征。
11、在一些实施例中,所述第一轨迹规划包括不包含障碍物或环境变化的轨迹,并且所述第二轨迹规划包括包含障碍物或环境变化的轨迹。
12、在一些实施例中,所述第一轨迹规划是离线确定的,并且所述最优序列的计算是实时进行的,由此所述最优序列是当前最优序列。
13、在一些实施例中,所述第一轨迹规划相对于所述第二轨迹规划的计算被赋予较小的权重。
14、在一些实施例中,所述操作还包括:计算用于所述车辆在所述第二时间点之后的第三时间点沿第三空间位置行驶的另一最优序列;以及通过用来自计算出的另一最优序列的信息更新所述第二轨迹规划来计算所述车辆的第三轨迹规划,其中所述第二轨迹规划是与所述第三轨迹规划的计算相关的另一参考轨迹规划。
15、在一些实施例中,所述第二轨迹规划和所述第三轨迹规划包括包含障碍物或环境变化的轨迹。
16、在一些实施例中,所述第二轨迹规划相对于所述第三轨迹规划的计算被赋予较小的权重。
17、根据所公开的技术的又一些实施例,一种非暂时性机器可读介质包括存储在其中的指令。所述指令在被处理器执行时使所述处理器执行操作。所述操作包括:确定用于车辆在第一时间点沿第一空间位置行驶的第一轨迹规划,其中所述第一轨迹规划是参考轨迹规划;计算用于所述车辆在所述第一时间点之后的第二时间点沿第二空间位置行驶的最优序列;以及通过用来自计算出的最优序列的信息更新所述第一轨迹规划来计算所述车辆的第二轨迹规划。
18、根据下面结合附图进行的详细描述,所公开技术的其他特征和方面将变得显而易见,附图通过示例的方式示出了根据所公开技术的实施例的特征。此概述并非旨在限制本文描述的任何发明的范围,所述发明仅通过所附权利要求来限定。
技术特征:
1.一种用于自动驾驶车辆的轨迹规划的方法,包括:
2.根据权利要求1所述的方法,其中,所述车辆的非线性动力学特征被用于所述第一轨迹规划的确定和所述最优序列的计算。
3.根据权利要求2所述的方法,其中,所述车辆的非线性动力学特征对应于横摆率、速率、侧滑、车轮角度、后轮速度、横向误差、路线误差、发动机转矩、前制动器转矩、后制动器转矩和纵向重量转移状态中的至少一者。
4.根据权利要求2所述的方法,其中,所述车辆的非线性动力学特征包括轮胎动力学特征。
5.根据权利要求1所述的方法,其中,所述第一轨迹规划包括不包含障碍物或环境变化的轨迹,并且所述第二轨迹规划包括包含障碍物或环境变化的轨迹。
6.根据权利要求1所述的方法,其中,所述第一轨迹规划是离线确定的,并且所述最优序列的计算是实时进行的,由此所述最优序列是当前最优序列。
7.根据权利要求1所述的方法,其中,所述第一轨迹规划相对于所述第二轨迹规划的计算被赋予较小的权重。
8.根据权利要求1所述的方法,其中,所述方法还包括:
9.根据权利要求8所述的方法,其中,所述第二轨迹规划和所述第三轨迹规划包括包含障碍物或环境变化的轨迹。
10.根据权利要求8所述的方法,其中,所述第二轨迹规划相对于所述第三轨迹规划的计算被赋予较小的权重。
11.一种用于自动驾驶车辆的轨迹规划的车辆控制系统,包括:
12.根据权利要求11所述的车辆控制系统,其中,所述车辆的非线性动力学特征被用于所述第一轨迹规划的确定和所述最优序列的计算。
13.根据权利要求12所述的车辆控制系统,其中,所述车辆的非线性动力学特征对应于横摆率、速率、侧滑、车轮角度、后轮速度、横向误差、路线误差、发动机转矩、前制动器转矩、后制动器转矩和纵向重量转移状态中的至少一者。
14.根据权利要求12所述的车辆控制系统,其中,所述车辆的非线性动力学特征包括轮胎动力学特征。
15.根据权利要求11所述的车辆控制系统,其中,所述第一轨迹规划包括不包含障碍物或环境变化的轨迹,并且所述第二轨迹规划包括包含障碍物或环境变化的轨迹。
16.根据权利要求11所述的车辆控制系统,其中,所述第一轨迹规划是离线确定的,并且所述最优序列的计算是实时进行的,由此所述最优序列是当前最优序列。
17.根据权利要求11所述的车辆控制系统,其中,所述第一轨迹规划相对于所述第二轨迹规划的计算被赋予较小的权重。
18.根据权利要求11所述的车辆控制系统,其中,所述操作还包括:
19.根据权利要求18所述的车辆控制系统,其中,所述第二轨迹规划和所述第三轨迹规划包括包含障碍物或环境变化的轨迹。
20.根据权利要求18所述的车辆控制系统,其中,所述第二轨迹规划相对于所述第三轨迹规划的计算被赋予较小的权重。
21.一种非暂时性机器可读介质,具有存储在其中的指令,所述指令在被处理器执行时使所述处理器执行操作,所述操作包括:
技术总结
公开了用于自动驾驶车辆的轨迹规划的系统和方法。示例性实施方案可以:确定用于所述车辆在第一时间点沿第一空间位置行驶的第一轨迹规划,所述第一轨迹规划为参考轨迹规划;计算用于所述车辆在所述第一时间点之后的第二时间点沿第二空间位置行驶的最优序列;以及通过用来自计算出的最优序列的信息更新所述第一轨迹规划来计算所述车辆的第二轨迹规划。
技术研发人员:J·A·达拉斯,M·汤普森,Y·M·J·戈赫,A·巴拉钱德兰
受保护的技术使用者:丰田研究院公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!